自旋三旋翼飞行器的概念设计研究*
2020-09-07李泽波黄戈莹王轶轩方潮铭王奕霄李博雯
李泽波,黄戈莹,王轶轩,方潮铭,王奕霄,李博雯
(北京航空航天大学a.航空科学与工程学院;b.机械工程及自动化学院;c.仪器科学与光电工程学院,北京 100191)
0 引言
更大载荷、更长航时以及更低成本始终是无人机行业的不变需求,现代化战争更是对无人机性能提出了更高的要求[1-2]。多旋翼无人机凭借其小型、灵活的特点[3],进一步丰富了特种作战手段,在未来多变而复杂的战场将发挥越来越多的作用。
相较于四旋翼、六旋翼等飞行器,三旋翼飞行器具有电机数少、结构紧凑、质量小、成本低、可控性好等优点[4],尤其适用于特种飞行器。目前国内外研究机构已对三旋翼无人机进行了一定研究,主要体现在其动力学模型和控制策略,如其姿态控制、抗干扰能力、机动性等,并建立了较为精确的动力学模型,并通过数值仿真进行了验证[4-6]。
限制三旋翼飞行器发展的原因主要是,它无法像偶数旋翼飞行器一样通过成对正反桨平衡扭矩,一般需要通过附加控制机构来平衡扭矩。比如可以通过一个舵机来控制其中一个旋翼的倾转,从而产生一个水平分力[7-8],但这种方法增加了需要控制的变量,且破坏了多旋翼的对称性,不利于控制的简化;或者可以同时3个舵机独立控制3个旋翼的倾转,使飞行器成为一个完全驱动系统[9],这种方法的控制量更多,复杂度甚至超过了六旋翼飞行器。
按照传统的控制思路,至少需要4个控制量才能实现对空间六自由度飞行器的稳定控制,这也决定了现有的三旋翼控制方案的控制变量并不比四旋翼少,而且这些引入的控制机构往往带来了更多的不利因素,三旋翼的固有优势被削弱。
本文设计了一种高度简化的三旋翼飞行器,3个旋翼对称分布于机身外周,放弃了对其中一个自由度的控制,仅使用3个电机实现对其他5个自由度的有效控制,使飞行器能完成一般多旋翼飞行器的基本飞行功能。
1 自旋三旋翼飞行器
自旋三旋翼飞行器是一款由多旋翼飞行器发展而来的新型飞行器,抛弃了传统意义上的偏航控制,其一大特征是在飞行时稳定自旋。本章将对该飞行器的总体设计方法和各部分的结构布局以及功能进行详细的阐述。
1.1 总体设计
基于控制简化的要求,从机体中心出发,在机身平面上互成120°伸出3根机轴,形成了三旋翼的机架。该机架具有与轴数相同数量的对称面和一个中心对称轴,具有高度的对称性。
基于自旋的特性,从提高气动效率的角度出发,将机轴设计成机翼的形状,使各部分光滑过渡。飞行器整体尺寸外形如同一个三叶桨,内部核心系统及载荷均可布置在机身内部和机臂中间部位,全机除桨叶外尽量减少外露。其概念图如图1所示。

图1 飞行器概念图Fig.1 Aircraft conceptual
自旋三旋翼飞行器主要由机身、3组完全相同的机翼和旋翼组成(如图2所示),机身在结构和功能上与普通多旋翼飞行器相似。机翼是指分布在原机轴位置的,具有一定翼型的结构,在自旋时能产生额外升力。旋翼由电机和螺旋桨组成,通过电机座固定在各个机翼末端,提供升力和控制力矩。需要注意的是,3个旋翼的旋转方向相同。机体的几何中心、机体重心均与机体坐标系的原点重合。机身中部自旋120°后完全重合,3套机翼、电机和螺旋桨完全相同,以至于可以在控制时将它们视为等同。
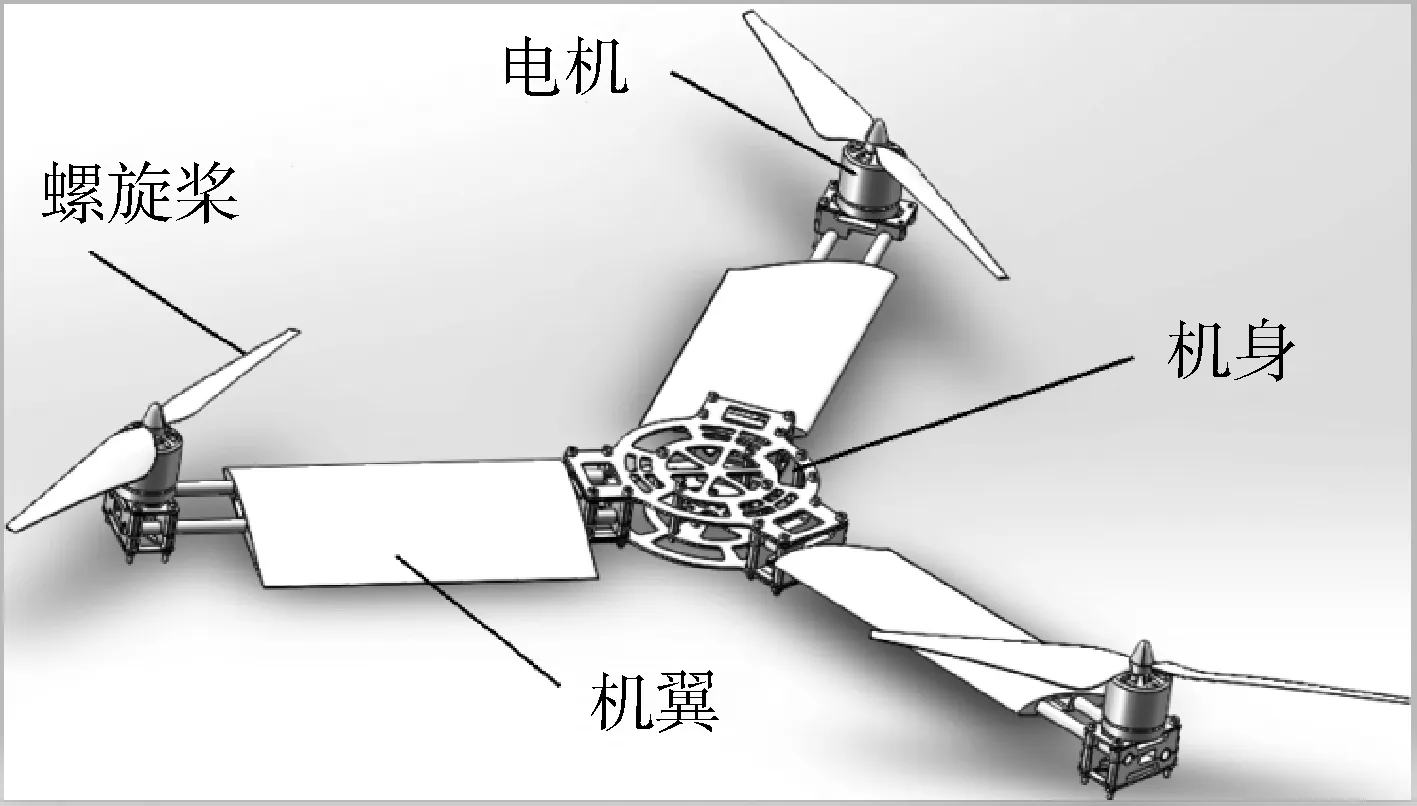
图2 飞行器结构示意图Fig.2 Aircraft structure diagram
1.2 机翼设计
自旋三旋翼飞行器的机翼是区别于传统多旋翼飞行器而独有的部分,其作用是在自旋时与空气相互作用产生额外升力,提高飞行器的气动效率。同时机翼受到的阻力叠加后可以形成一个与自旋方向相反的力矩,与3个旋翼产生的扭矩互相平衡。
综合考虑升阻比、力矩系数等因素,机翼选取VR-7翼型[10],并使迎角朝上,充分利用飞行器自旋时与空气相对运动产生的额外升力[11],使自旋三旋翼飞行器具有更高的气动效率。
在自旋三旋翼飞行器中,一种可行的样机结构如下:飞行器机翼采用双梁式结构形式,内部填充挤塑板夹层,外有玻纤蒙皮。挤塑板夹层内部开有特定型槽,供线路通过。机翼蒙皮与机身外壳相切。双梁通过定制夹具固定在机身板层之间,机翼迎角由双梁之间的高度差实现。图3为机翼的示意图。
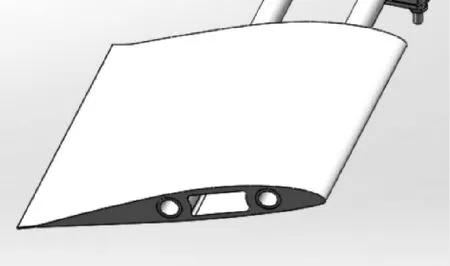
图3 机翼Fig.3 Airfoil
1.3 机身设计
自旋三旋翼飞行器对机身没有特殊要求,可根据使用场景的需要进行设计。一种可行的样机结构如下(如图4所示):机身采用多层式架构,每个层板被设计为多孔结构,在减重的同时使其能承受一定的冲击变形[12]。飞控及其他传感器置于第一层板之上,一、二层板间以夹具作为支撑件,用以放置电机和电子调速器等元件;二层板之下用于装载任务载荷,可根据具体需要设计。最下面层板下方有小滚珠,兼有起落架功能。

图4 机身结构Fig.4 Frame structure
1.4 结构分析
多旋翼飞行器的主要传力位于旋翼与机身之间的碳杆上。电机带动桨叶高速旋转产生的升力,经电机座传递到碳管上,以剪流的形式传递到机身中部;机翼与空气的相对作用产生的力和力矩也从不同的方向以剪力的形式作用在碳管上,最终与飞行器所受的重力和惯性力平衡。桨叶高速旋转时由于空气阻力导致的反扭矩,经电机座以力矩和拉压力的形式作用到2根碳管,与3个机翼所受空气阻力合成的力矩平衡。此外,旋翼受到的离心力也会在碳管处产生拉力。具体的受力情况如图5所示。

图5 飞行器受力示意图Fig.5 Aircraft force diagram
2 自旋飞行
自旋飞行是指飞行器在起飞以及之后的飞行过程中,始终绕着其中心轴线旋转。通过各个电机推力的周期性变化,在自旋方向不稳定的情况下,实现对飞行器的有效控制。本章将介绍这种飞行方式的基本原理,建立自旋飞行的动力学模型,并推导出控制方法。
2.1 飞行原理
与传统多旋翼飞行器需要依靠成对的正反旋翼互相抵消力矩不同[13],自旋三旋翼飞行器所有旋翼旋转方向相同,旋翼同方向旋转产生升力的同时,与空气相互作用形成一个反方向的力矩。在自旋飞行器起飞后,该力矩会使飞行器机身朝着旋翼的反方向自旋。随着转速的增大,机身侧边受到的空气阻力逐渐增大,当转速增大到一定程度后,机身受到的阻力矩与3个旋翼产生的力矩之和大小相等,达到一种平衡状态。之后,飞行器将以较稳定的转速自旋。
在理想情况下,即飞行器保持绝对水平并不受外力干扰,其俯仰角和滚转角保持为0,通过控制升力与重力的大小关系实现高度控制,此时的飞行器是五自由度稳定的。机体坐标系的z轴与地理系的z轴重合。若飞行器姿态不再保持水平,但机体系z轴的方向仍保持稳定,这时候升力的方向不会因为自旋而发生变化,即得到了一个方向稳定,大小可变化的力的控制量。也将这种情况也称为五自由度稳定的。
从下一节开始将对自旋三旋翼飞行器的动力学模型进行分析,由于篇幅有限,这里将重点突出自旋三旋翼飞行器与传统多旋翼飞行器区别的部分,对于风力等扰动因素不是本文的研究重点,将进行忽略或者简化[14-15]。
2.2 自旋飞行模型建立
飞行器受到的外力大致可以简化为重力,机翼与空气的相互作用力,以及旋翼升力和扭矩。其中重力大小为定值,始终沿铅垂方向向下。机翼与空气的相互作用力可以分解为水平方向上的阻力和垂直方向上的升力[16]。由于自旋三旋翼飞行器的对称性,水平方向上的3个阻力大小基本相等,方向互成120°,可以叠加成一个沿机体系z轴方向的力矩,该力矩与3个旋翼产生的力矩互相抵消。机翼垂直方向上的升力与旋翼升力的方向相同,可以叠加成一个垂直机身平面向上的升力F和一个平行于机身平面方向的力矩M。F和M可由式(1),(2)计算得出:
(1)
(2)
式中:F1,F2,F3为3个旋翼产生的升力;R为3个旋翼到中心的距离;F0为3个机翼产生的升力之和;r为F0合力中心与机体中心的偏差;θ为表示旋翼相对位置的角度参数。
当机体系z轴方向保持稳定时,飞行器的升力F的方向是稳定的,通过调整其与重力的关系,可以实现对位置自由度的控制。旋翼升力和的控制量
U1=-FI-G-F0,
(3)
式中:FI为根据飞行控制的需要确定的惯性力;G为重力;F0为飞行参数计算出的附加升力。
具体方向的控制取决于飞行器的实时朝向,朝向可通过飞行器的合力矩M控制。
M的方向可能沿着飞行器平面上的任何一个方向,从而造成所谓的不可控。由式(2)可知,M的方向由Fi,θ和F0r共同决定。F0r为小量,可以暂时忽略,或者根据飞行参数确定后作为修正项。根据θ调整F1,F2,F3的大小关系可以实现M方向上的稳定。
U2=Jxαr,
(4)
(5)
式中:Jx,Jz为飞行器对x轴和z轴的转动惯量;Jzn为旋翼转动惯量在z轴方向上的分量;αr为飞行器倾转角加速度;ωr为飞行器倾转角的角加速度;ωz为飞行器自旋转速;ωzi为各个旋翼转速。
综上,对任意θ,都以唯一解出F1,F2,F3的值。
(6)
(7)
(8)
2.3 模型分析与讨论
自旋三旋翼飞行器与空气相互作用的所有受力经合成后,等效为一个垂直于机身平面向上的升力和一个平行于机身平面的力矩,通过调整3个电机的推力可以实现对升力和力矩的控制。其中力矩可以保证机身平面的稳定性,并可以改变机身的朝向,从而改变升力的方向。升力与重力的合力决定飞行器的位置自由度的稳定性。
自旋三旋翼飞行器在一个姿态角不稳定的情况下实现对其他5个自由度的有效控制,是一种动态的稳定。区别于传统飞行器对3个姿态角稳定的要求,自旋飞行器降低了对控制的要求,对机体自旋的角度和角速度不作控制,将更多的控制资源留给余下的2个方向,能使飞行器获得更好的机动性能,适应更加复杂的环境。
3 应用前景
自旋三旋翼飞行器巧妙地避开了制约三旋翼发展的扭矩问题,使三旋翼的优势得以充分发挥。它保留了传统多旋翼飞行器垂直起降、机动灵活的优点,又具有更高的气动效率。但同时,由于牺牲了一个自由度,自旋三旋翼飞行器只能在无轴向方向控制要求的领域实现应用,如军用的靶机、预警机、轰炸机、电子干扰一体机、核生化武器监测[18-20],民用的农林植保、航模竞技、通信中继、气象环保[21-23]等领域。这些对飞行器的轴向方向的控制没有要求的领域,如果使用自旋飞行器,能在满足同等性能要求的情况下,大大降低生产和使用成本。
作为一款突破性的飞行器,自旋飞行器的投入使用也将对现有的作战体系产生一定的影响。自旋飞行器的低廉成本更加符合无人机蜂群作战的需求[24];长航时定点悬停的优异能力提供了更加便捷的作战支援[25];自旋飞行更能结合冷兵器实现精确斩首[26];高机动的轨迹增大敌方防御的难度[27];高速自旋自动削弱甚至免疫激光武器的攻击[28]。可以想象,自旋三旋翼飞行器的出现将影响未来无人作战格局。
4 结束语
本文提出了自旋飞行器的概念,根据对称、极简的理念对自旋飞行器进行了初步设计,从动力学的角度对自旋飞行器的飞行原理进行了分析和阐述,并在此基础上提出了五自由度自旋飞行的控制模型,验证了其控制的可行性,可以作为相关研究的基础与参照。
