巡检机器人在井场上的应用
2020-09-06卢光旭
卢光旭

摘 要:传统井场巡检采用人工巡检方式,工作量大、巡检效率低。井场智能巡检机器人实现了自主巡检,并把巡检结果上传至SCADA系统。井场智能巡检机器人采用激光雷达无轨导航方式,具有仪表识别、抽油机状态检测、红外测温、可燃气体检测、异常声音检测等功能。
关键词:井场巡检;自主导航;机器人
中图分类号:TP242 文献标志码:A
1 井场巡检的特点和内容
井场巡检采用人工巡检方式,工作量大、巡检效率低,且存在无法及时发现少量气体泄漏、温度异常、声音异常、仪表读数异常等故障信息,以及恶劣天气下巡检存在安全隐患等问题。而巡检机器人具有安防监控功能,能及时发现可疑人员进入,并通过扬声器喊话警告。巡检机器人内置GPS定位跟踪装置,当检测到自身位置移动到安全区域以外时,会及时向监控中心上传报警信息。
2 机器人的系统组成和工作原理
2.1 系统组成
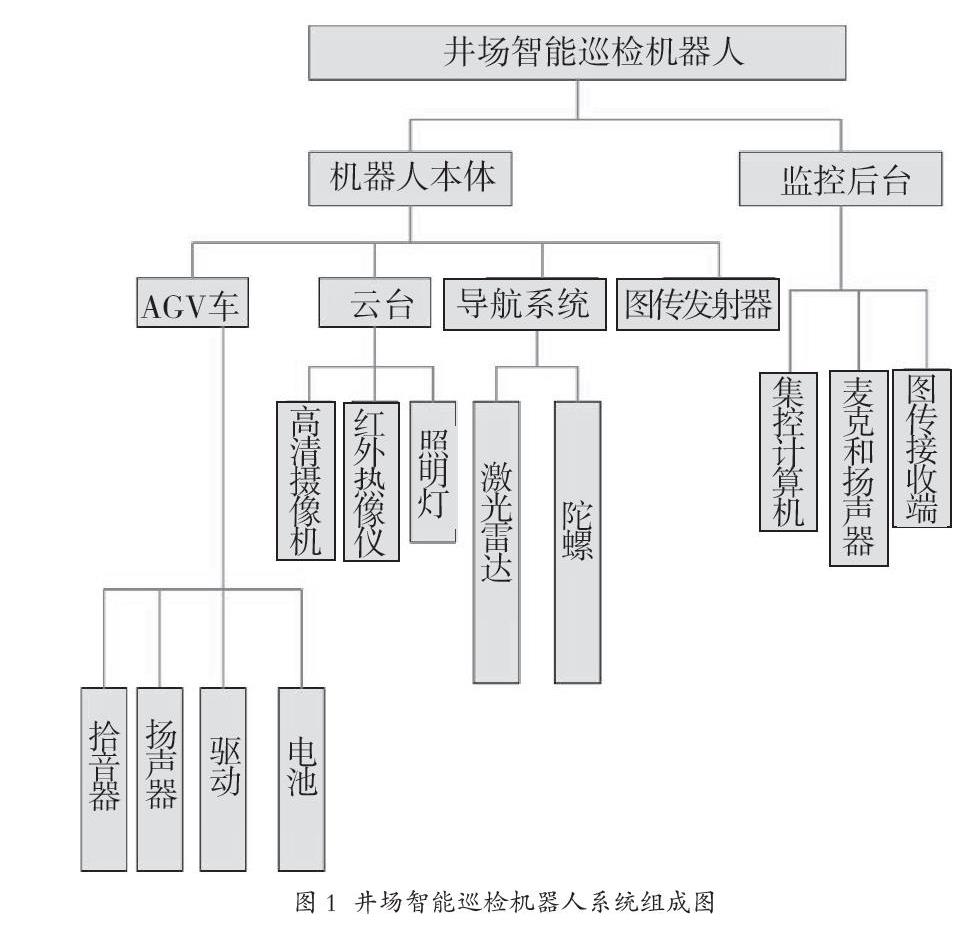
井场智能巡检机器人是集多传感器融合技术、电磁兼容技术、导航及行为规划技术、机器人视觉、安防技术、海量信息的无线传输于一体的复杂系统。其主要由机器人本体、充电房、远程集控后台组成。
2.2 工作原理
井场智能巡检机器人通过激光雷达和IMU组合导航,利用车载红外、可见光及声音传感器检测异常状况。机器人将采集到的所有图像和数据,通过无线传输系统实时发送到监控后台,监控后台负责数据显示、记录和路径规划。
对于初次巡检的场景,机器人需要制作巡检路径地图,并存入导航计算机。机器人制作完地图后,可以通过后台下发巡检任务。在巡检期间,机器人控制云台对巡检场景进行拍照和摄像。
3 机器人自动巡检的功能及实现方式
井场智能巡检机器人具备以下13项基本功能。
3.1 配备高清摄像机进行可见光表计及渗漏检测
巡检机器人的云台配备高清摄像机,可以进行可见光拍照,并对所拍的照片进行仪表检测,得到当前压力表的指针读数。
3.2 声音采集及分析功能
巡检机器人可以采集并分析拾音器采集到的音频数据,通过频域分析可以检测出是否有漏油、漏气等异常声音。
3.3 双向语音通信功能
巡检机器人集成有扬声器、拾音器和音频服务器。通过后台对音频服务器的远程访问,可以实现双向语音对讲功能。
3.4 抽油机状态监测功能
巡检机器人检测的抽油机数据包括压力表指针数值、光杆温度(高温、低温)、光杆形变、电机温度、声音分析(漏气、漏油)以及甲烷浓度。
3.5 手动控制功能
手动控制功能包括云台控制和机器人运动控制。云台控制用来控制机器人上的云台上下左右移动。机器人运动控制包括一键返航、取消巡检、修井、巡检、暂停、继续等。
3.6 数据查询、筛选及导出功能
仪表、温度、声音分析等结果数据通过ModbusTCP协议传送给IOServer,管理员可从IOServer数据库根据时间戳、变量名等对数据进行查询和筛选并导出。
3.7 报表功能
巡检机器人的巡检数据可以通过生成报表导出。
3.8 视频对接功能
巡检机器人采用海康威视的网络摄像机,可接入安防监控平台,也可用视频控件在SCADA系统中显示。
3.9 远距离网络传输功能
巡检机器人通过无线网桥实现远距离网络传输功能。
3.10 一键返航功能
巡检机器人具有一键返航功能,通过单击“一键返航”按钮暂停当前巡检任务或结束修井监控状态,之后让机器人返回充电房。
3.11 自主充电功能
巡检机器人具有自主充电功能。机器人完成一次巡检任务,或在巡检过程中检测到电量低于阈值时,会自动返回充电房,进入充电位置,自动充电。
3.12 GPS定位功能
巡检机器人具有GPS定位功能,巡检机器人将自身位置发送给后台软件,当后台软件检测到巡检机器人位置异常时会报警。
3.13 自检及告警功能
巡检机器人的后台软件显示将当前工作状态、工作电压、故障信息和越界检测信息。
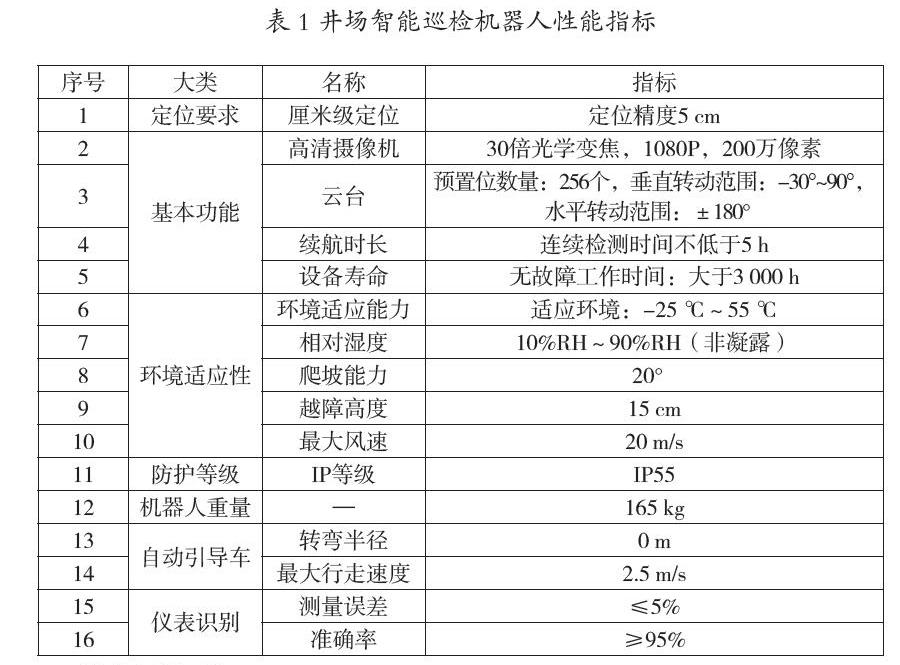
4 巡检机器人的性能
经过实际测试巡检机器人的性能指标见表1。
5 关键技术
5.1 激光雷达特征匹配技术
文献[1]提出了基于SEF算法的激光雷达数据特征分割法,该算法通过计算激光雷达相邻两帧原始数据的差值得到直线,进一步得到分割图像的特征。该方法无法完成相交直线的提取。文献[2]采用LEPF算法对激光雷达图像进行特征提取。该方法容易产生欠提取现象。该文提出了基于点特征提取和线性特征提取的方法。
5.1.1 点状特征提取
点状特征指树木、设备支撑杆等在点云图上表述为孤立、半径较小的点集,采用聚类算法对点状特征进行提取。以数据集在空间分布上的稀疏程度进行聚类,不需要在聚类之前预先设定类的数量。
5.1.2 线性特征提取
线性特征指围墙、建筑物等在点云图上表述为长度足够大的线段,采用霍夫变换对点状特征进行提取。通过判断线段的间距、斜率等信息,对提取的线段进行合并,提高准确率。
5.2 SIFT算法光杆识别技術
利用SIFT算法对光杆、电机和抽油机运动进行检测,如图2所示。
首先,利用分辨率384×288,6 mm焦距的非制冷红外热像仪,检测直径约10 mm的光杆的温度和形变。光杆在红外图像上的成像宽度仅占5个像素左右,且背景复杂。SIFT算法通过关键位置检测、特征提取、特征匹配等步骤定位光杆的位置,进而检测光杆的温差和细微形变,其能及时检测抽油机的抽油状态,并对故障进行报警。
其次,SIFT算法通过关键位置检测、特征提取、特征匹配等步骤定位电机的位置,进而测量电机的温度。
最后,SIFT算法通过关键位置检测、特征提取、特征匹配等步骤,通过输出的运动跟踪点的运动路径和方向,即可判断抽油机是否在工作。
6 结论
目前长庆油田已有8 000多座井场进行了视频系统建设,电线杆上装有摄像头、喇叭、天线。井场周围装有围墙。但是这些井场并没有实现无人值守。用机器人来代替人工进行日常巡检,可以提高井场的智能化水平,实现无人值守是油田的发展趋势,在未来得到推广的可能性较大,具有巨大的社会效益和经济效益。
参考文献
[1]陈丽敏,戚天兰,杜殷飞,等.一种快速有效的卷烟激光打码防伪识别算法[J].信息工程期刊:中英文版,2014,4(3):78-82.
[2]龚卫国,刘润瑶,张睿.光照突变下融合多类特征的场景分割方法(英文)[J].红外与激光工程,2014,43(12):4164-4169.
