基于图像识别技术的水位测量误差分析
2020-09-02邹洪波
邹洪波
(广东省水文局广州分局,广州 510150)
[关键字] 图像识别;水位;误差分析;太平场水文站
水位数据监测是水文监测当中重要的、常规的观测参数,人们对此进行了大量研究,发展了众多的监测方式,如浮子水位计、超声波水位传感器、雷达水位计、压力式水位计、激光水位计,振玄水位计等。其中一些监测手段需要大量的前期基建工作或安装较为复杂,使得监测成本较高。随着人工智能技术的快速发展,在此基础上开发了基于高性能视频方式的水位监测。基于视频图像识别的水位监测,是通过神经网络和深度学习等技术来分析图像,既能得到准确的数据,又能得到第一手的视频监控资料。有基础建设投入小,建设周期快,安装方便快捷等优点。
1 基于图像识别技术的水位测量原理
图像识别技术的水位测量是指通过安装固定好的摄像机获得水尺原始图像后,进行射影变换,采用Otsu 法(最大类间方差法)计算得到二值图像,再采用形态学处理后通过Canny 算子得到一个有效边缘值,确定水位坐标值,最终利用平滑算法去除随机差值[1],得到准确的水位值,并通过4G网络把计算的水位值和视频图像一同上传到中心服务器。
图像识别技术在水位测量中需要解决许多复杂应用场景,如水面倒影和水体透明度对水面线识别的影响,逆光条件和夜晚无光对视频图像的影响,水尺污染和漂浮物遮挡影响水尺读数,由于相机安装时位置和角度相对固定,水位上涨有可能超出相机拍摄范围等问题。
2 试验资料分析
2.1 试验点概况
试验站点选择于太平场镇水文站,位于广州市从化区太平镇太平场,设立于1975 年1 月,由原牛心岭水文站下迁而来,属珠江三角洲河口区流溪河中游控制站,集水面积1641 km2,测验项目有水位、雨量、水质和蒸发等。
2.2 比测设备选取
采用浮子式机械编码器作为比测设备,由于该设备安装于专用设备房的自记井内,受外界风浪等不良条件影响小,每天08:00、18:00 有专人校准水位,水位数据准确。水位数据采用频率为5 min,由遥测设备通过4G网络上传至中心服务器。
2.3 数据选取
选取水位数据连续和具有代表性的时段。①选取水位变幅较大的时间段,所选取时段水位从10.60~12.06 m,变幅为1.46 m;②选择白天光线较好共200 个数据,晚上无光线数据138 个;③其中56 个数据受漂浮物影响。白天、晚上、漂浮物遮挡水尺场景分别见图1~图3。

图1 白天水尺场景
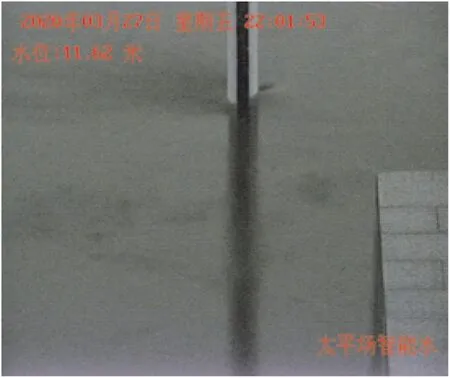
图2 晚上水尺场景

图3 漂浮物遮挡场景
在白天的场景下,选取从2020 年3 月27 日11:50~2020 年3 月27 日18:55 和2020 年3 月28 月06:05~2020 年3 月28 日11:15 每5 min 一个数据,共148个水位数据。水位从10.59~11.54 m。
在夜晚的场景下,选取从2020 年3 月27 日19:00~2020 年3 月28 日06:00 和每5 min 一个数据,共72个水位数据。水位从11.17~11.74 m。
在飘浮物遮挡的场景下,选取从2020年3月28日11:20~2020 年3 月28 日15:55 每5 min 一个数据,共56个水位数据。水位从10.54~10.98 m。
分别对以上3 种情况的数据进行分析,绘制浮子水位图像识别水位关系图见图4。
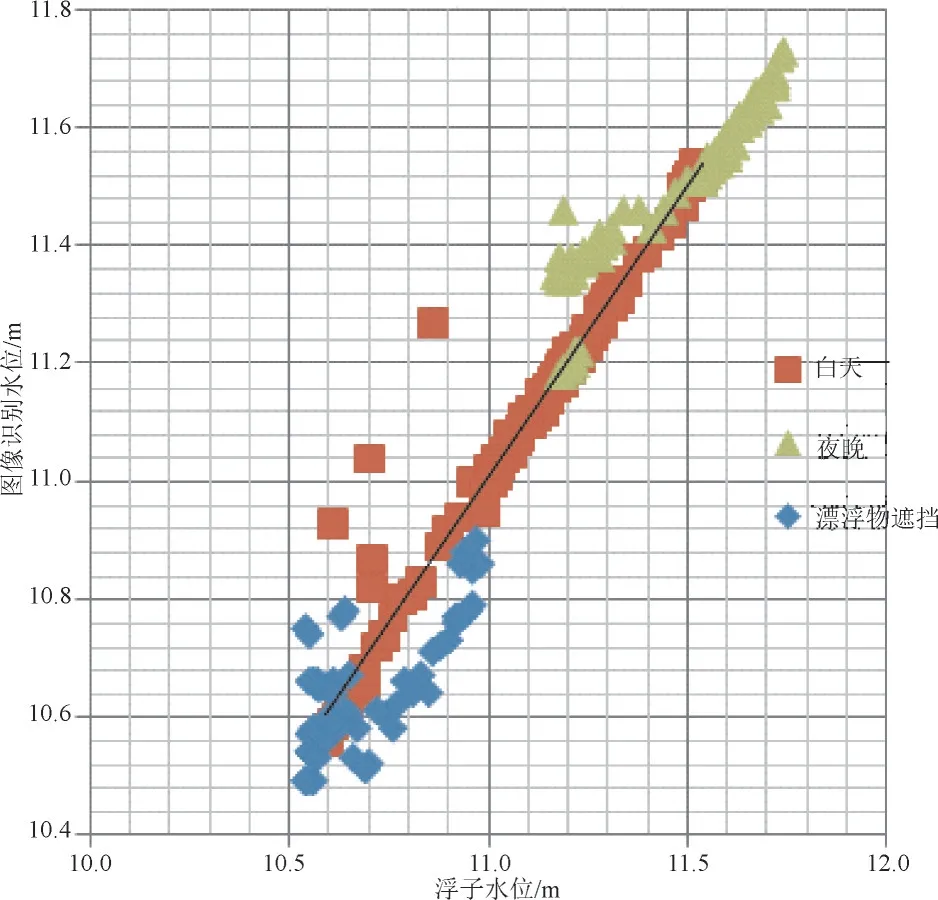
图4 浮子水位~图像识别水位关系图
2.4 误差分析
误差分析依据《水位观测标准》(GB/T50138-2010),采用自动监测设备检测水位时,其不确定度应按下列方法估算:
(1)系统不确定度X"公式:

式中:Pyi自动监测水位;Pi人工校测水位;N 校测次数。
(2)随机不确定度X′计算公式:

(3)综合不确定度Xz计算公式:

依据以上公式分别对白天、晚上、有漂浮物遮挡的场景进行误差分析(见表1、图5)。
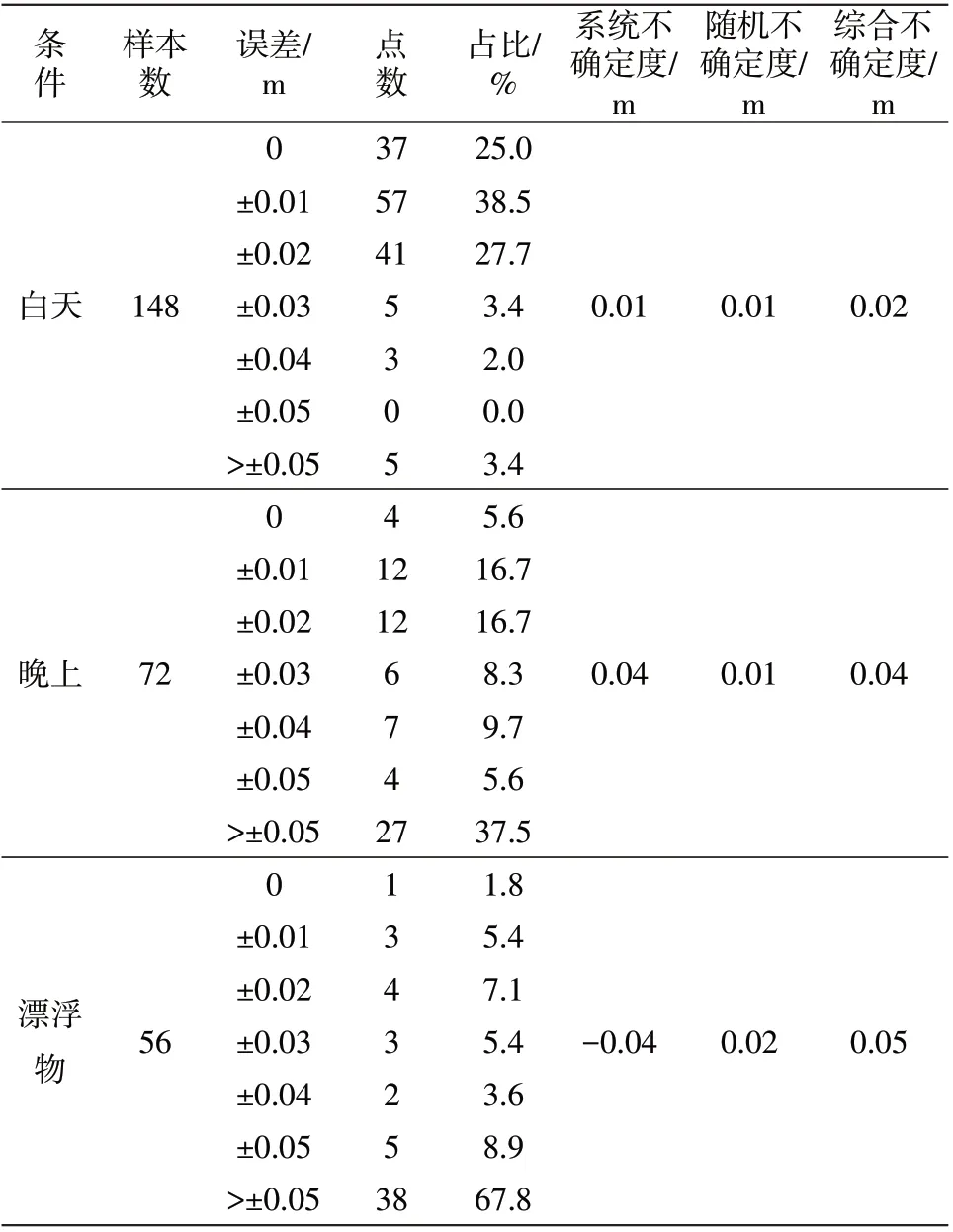
条件 白天样本数误差/m 0点数 3 7系统不确定度/m随机不确定度/m综合不确定度/m 5305 41 2 148 57 41 0.01 0.01 0.02 12晚上72 6742 0.04 0.01 0.04漂浮物56±0.01±0.02±0.03±0.04±0.05>±0.05 0±0.01±0.02±0.03±0.04±0.05>±0.05 0±0.01±0.02±0.03±0.04±0.05>±0.05 71343253 8占比/%25.0 38.5 27.7 3.4 2.0 0.0 3.4 5.6 16.7 16.7 8.3 9.7 5.6 37.5 1.8 5.4 7.1 5.4 3.6 8.9 67.8-0.04 0.02 0.05
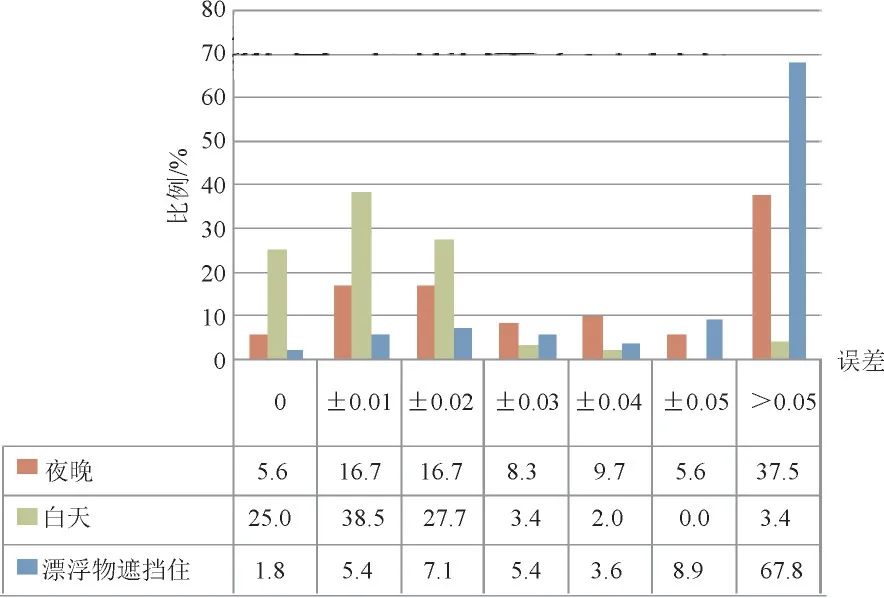
图5 不同场景下的误差占比图
从数据统计看,在白天,图像识别系统的误差大于5 cm 共5 个点,占3.4%;误差为0 的数据占24.8%;误差小于等于2 cm 的数据占91.2%;误差小于等于3 cm 的数据占94.6%。其系统不确定度为1 cm、综合不确定度为2 cm,符合规范要求。
在夜晚,图像识别系统的误差大于5 cm 共27个点,占37.5%;误差为0 的数据占5.6%;误差小于等于2 cm的数据占44.4%;误差小于等于3 cm的数据占52.8%。系统不确定度4 cm、综合不确定度4 cm,不符合规范要求。
在漂浮物遮挡的情况下,图像识别系统误差大于5 cm 的共38 个点,占67.8%;误差为0 的数据占1.8%;误差小于等于2 cm 的数据占14.3%;误差小于等于3 cm 的数据占19.6%。系统不确定度4 cm、综合不确定度5 cm,不符合规范要求。
对夜晚和漂浮物遮挡场景误差较大的问题,有以下改进方案。
(1)对夜晚无光条件下测量不准的问题,可以安装具有红外反光涂层的水尺,提高暗光场景的测量精度。
(2)对漂浮物等场景的测量误差较大的情况,建议在中心服务器增加学习和训练功能模块。或由在站人员清理遮挡水尺的漂浮物。
(3)在安装相机时需要综合考虑安装水平角度,即要放平角度(角度越平越有利于测量)又要能测得最低、最高水位,避免水位涨落超出测量范围的问题。
3 结语
对所有样本进行综合分析,其测量精度基本符合应用要求,光线较好的情况下准确率较高。虽然在夜晚和漂浮物遮挡的场景误差较大,但可以通过安装红外反光涂层的水尺和人工清理遮挡水尺的漂浮物等方式解决。图像识别技术属于新技术,随着人工智能技术的发展,水位识别精度将进一步提高。