飞翼布局飞机舵面偏转对RCS的影响研究
2020-08-31李艺海何太袁广田
李艺海 何太 袁广田

摘 要:针对舵面偏转后飞翼布局的雷达截面积(RCS)特性的变化,应用高精度的快速多极子算法(MLFMM)对不同组合舵偏对典型飞翼布局无人机的RCS的影响进行量化研究,研究表明舵面偏转会对低RCS的隐身无人机RCS的峰值、峰值宽度和均值造成一定的影响;在隐蔽突防过程中,应避免使用类似开裂式组合方向舵的控制方式;也应尽量避免偏转后的不同舵面在同一个照射方向形成夹角,以避免飞机RCS的波峰、波峰宽度及RCS均值显著增加。
关键词:飞翼布局;RCS;控制舵面;隐蔽突防
中图分类号:V218 文献标志码:A 文章编号:2095-2945(2020)25-0005-04
Abstract: For the change of Radar Cross Section (RCS) of flying wing when its control surface is rotated, a highly accurate Multi Level Fast Multipole Method (MLFMM) was used to study the influence of different combinations of surface deflection on RCS of a typical flying wing aircraft. The results show that surface deflection has a certain effect on the RCS peak of low RCS stealth aircraft, as well as the peak width and average. In the process of stealthy penetration, the use of split-drag-rudder should be avoided, and different surfaces forming an angle in the same radar exposure direction should be avoided, so as not to lead to a significant increase in RCS peak, peak width and RCS mean of the plane.
Keyword: flying wing; RCS; control surface; stealthy penetration
引言
在现代作战飞行器上采用隐身技术成为不可逆转的趋势,并已成为作战飞机的基本要求。隐身性是第五代作战飞机的主要特点之一,它与超声速巡航、超机动飞行和超级信息优势并称为第五代作战飞机的四大特点。先进的无人作战飞机也继承了隐身性的特点,在未来的作战飞机领域逐渐占有更大地比重[1]。
用于隐闭突防的无人攻击机,隐身性能已被提升到空前的高度。在前期设计中,已将隐身指标作为最主要的指标之一。
但是,在前期设计过程中,主要从静态RCS特性考虑。而静态RCS特性仅适合于飞机总体和隐身设计,仅只考虑整体外形的RCS特性。在实际作战使用中,隐蔽空防是一个动态过程,其间飞机的姿态和活动舵面不断地在发生改变,且不处于设计最佳状态,尤其是活动舵面的偏转,往往会对飞机的RCS产生较大影响,使飞机RCS特性与静态预估不一致[2]。特别是在大机动时,飞机活动舵面偏转过大,会完全破坏飞机的隐身特性,使敌方雷达捕捉到我方飞机。
例如,B2飞机的开裂式阻力舵,正常飞行时,上下两片阻力舵会有一个5°的开裂角,这会增加飞机的RCS。因此,在隐蔽突防过程中,B2飞机会切换到隐蔽突防模式,收起开裂式阻力舵,以保证自身良好的RCS特性,减小被敌方雷达探测的概率。
本文应用高精度的MLFMM算法,以某型飞翼布局无人机为研究对象,对其舵面偏转的RCS进行研究,给出可用于隐蔽突防的控制舵面偏转规律。
1 研究对象说明
本文以一典型隐身无人机为研究对象。计算其舵面偏转对无人机RCS的影响。其活动舵面如图1所示。各舵面组合控制实现该飞机的纵横航三向控制。一对升降副翼同偏,用于飞机的纵向控制。因其控制相对其他形式比较简单,不是本文研究重点。本文主要研究重点是较复杂的横航向控制舵面组合及其重构组合的RCS特性。舵面组合控制方案如下:
(1)偏航方案1——开裂式组合方向舵:由嵌入式阻力舵和其后方的升降副翼组成,两者同时偏转,偏转规律为嵌入式阻力舵上偏45°/升降副翼下偏30°,用于控制航向。
(2)顺气流开裂式组合舵面:与方案1)相同,仅对SSD舵面的偏转方向进行微调,使其与气流方向一致。
(3)滚转方案1(差动襟翼):左侧升降副翼和右侧升降副翼差动实现,偏转规律为左侧升降副翼下偏30°/右侧升降副翼上偏30°。
(4)滚转方案2(舵面重构):由一侧升降副翼与另一侧嵌入式阻力舵组成,偏转规律为一侧升降副翼下偏30°/另一侧嵌入式舵面上偏30°。
(5)偏航方案2(舵面重构):由嵌入阻力舵与同侧外襟翼组成,偏转规律为阻力舵偏度35°/同侧外襟翼偏度30°。
(6)偏航方案3(舵面重构):由一側升降副翼与同侧外襟翼组成,偏转规律为一侧升降副翼上偏30°/同侧外襟翼下偏20°。
2 计算方法说明及验证
本文采用高计算精度的快速多极子法[3](MLFMM),该方法以基于矩量法[4]的快速算法,是通过对近、远场分别处理来加速迭代过程中的矩阵和向量相乘,实现快速计算目的,其优点是保留了矩量法的高计算精度,其缺点是需要较大的计算机内存。
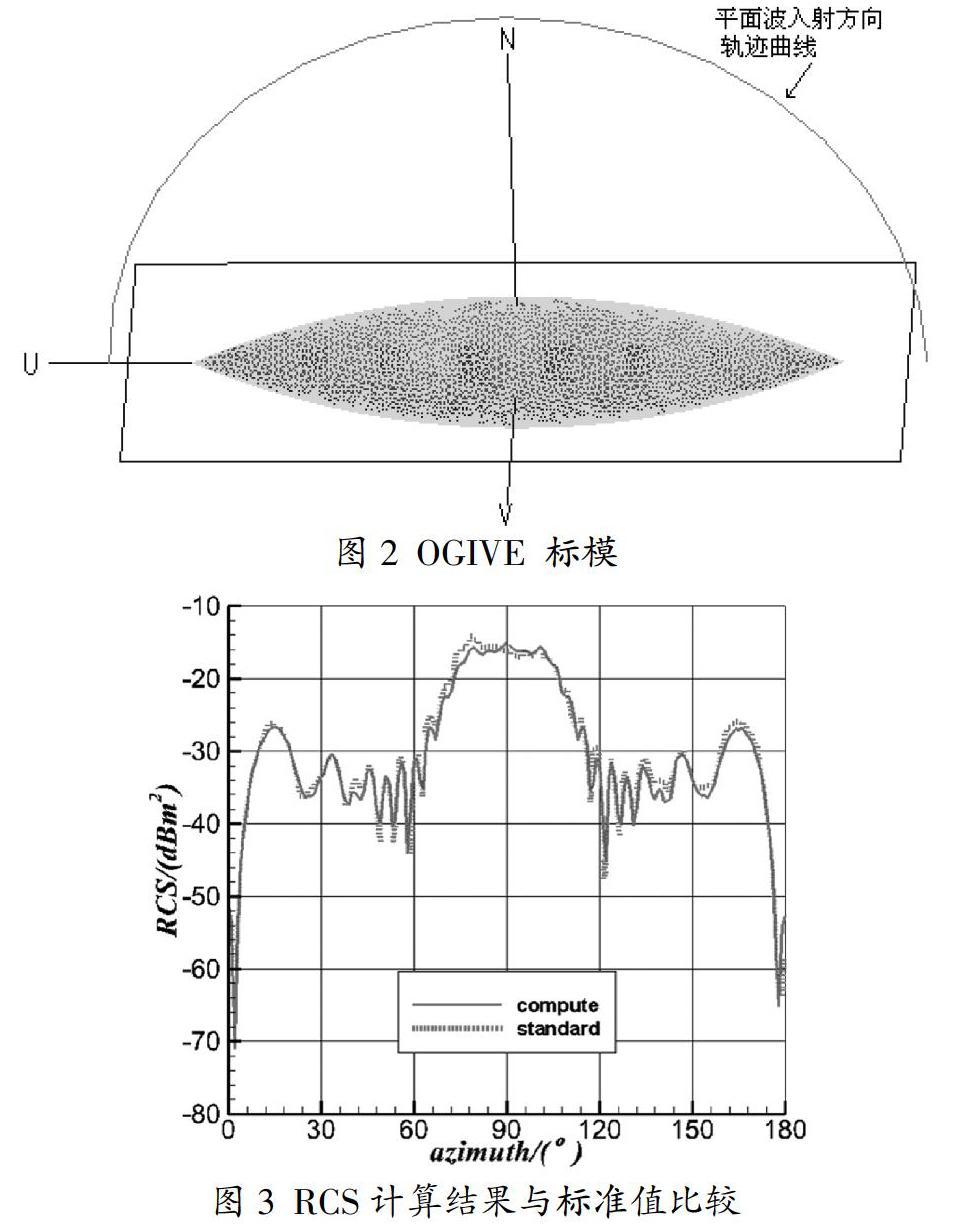
算法验证采用国际公认的OGIVE标模进行验证。标模外形与雷达波照射的方向如图2所示。计算结果与标准测试结果的比较见图3,可见,无论是尖角还是曲率变化较小的中间部位,计算结果与标准值符合良好,计算结果很好地给出了散射波的波峰、波谷及其宽度。由验证结果可见,MLFMM算法可以满足后续无人机的隐身性能计算。
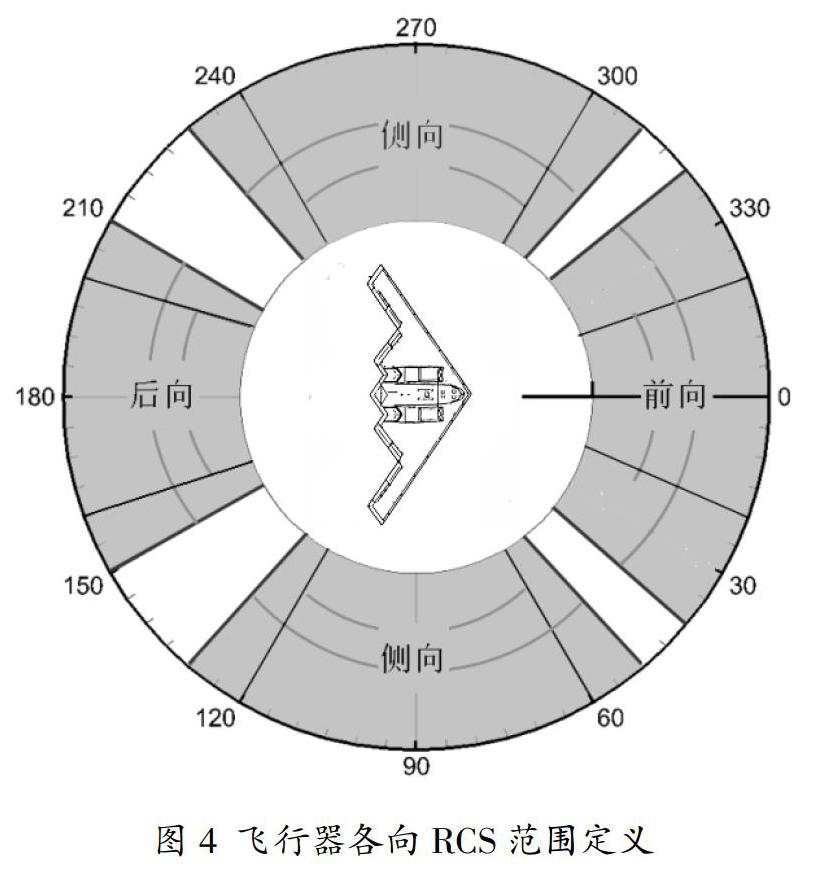
飞行器前向、侧向和后向RCS的定义区域如图4所示,与行业公认的定义相同。
3 计算结果分析
3.1 结果对比分析
如图5,雷达波水平极化,干净构形与不同控制方案的RCS相比,干净构形的RCS最低;用于航向控制的开裂式阻力舵对飞机RCS影响最大,使全机RCS增加了1.09m2左右,使前向RCS增加0.29m2,右侧RCS增加0.19m2,左侧RCS增加0.26m2,后向RCS增加3.2m2左右;雷达波垂直极化,开裂式阻力舵使全机RCS增加了1.14m2左右,使前向RCS增加0.02m2,右侧RCS增加0.10m2,左侧RCS增加0.09m2,后向RCS增加4.88m2左右。
对RCS影响较大的是偏航方案2。该控制方案对飞机RCS的影响大于其他控制方案,小于控制方案1。雷达波水平极化,该活动舵面组合偏转,使全机RCS增加了0.45m2左右,使前向RCS增加0.06m2,右侧RCS增加0.18m2,左侧RCS增加0.28m2,后向RCS增加1.09m2左右。雷达波垂直极化,给合控制舵面偏转,使全机RCS增加了0.53m2左右,使前向RCS增加0.02m2,右侧RCS增加-0.01m2,左侧RCS增加0.05m2,后向RCS增加1.99m2左右。
分析可见,在所有控制方案中,开裂式阻力舵(控制方案1、2)对飞机的隐身特性影响最大,在隐蔽突防过程中,建议不使用;与开裂式阻力舵控制原理类似的活动舵面,对飞机的隐身特性影响也较大,在隐蔽突防过程中,也建议不使用。
由计算结果对比可知,在低RCS无人机隐蔽突防过程中,应尽量避免使用控制方案1、2、5;应使用控制方案3、4、6。
3.2 机理分析
左机翼开裂式阻力舵打开时,在上下两个舵面在同一个照射方向形成75°夹角,由图6与图7比较可见,当雷达入射波从右后方垂直照射飞机时,形成的该夹角是一个强散射源,使飞机右后方的RCS波峰明显增加,波峰宽度也明显增加,同时也出现了多个较弱的波峰,导致飞机的RCS的均值增加明显,顯著增加了飞机被敌方雷达发现的概率。控制方案5也有类似的现象。
以上分析可见,隐蔽突防的飞机,控制舵面组合偏转时,应尽量避免偏转后的舵面在同一个照射方向形成夹角,使飞机RCS的波峰、波峰宽度及RCS均值显著增加。
4 结论
基于MLFMM对一典型BWB布局无人机的组合舵面偏转方案进行RCS对比,对比计算结果表明,无人机控制舵面不同的组合偏转形式,会对无人机RCS产生不同的影响(如图8、9)。
(1)用于航向控制的开裂式组合方向舵对于无人机RCS的影响最为显著,严重影响了无人机的隐蔽突防能力,在执行隐蔽突防过程中,不建议使用。
(2)控制舵面组合偏转时,应尽量避免偏转后的舵面在同一个照射方向形成夹角,以避免飞机RCS的波峰、波峰宽度及RCS均值显著增加。
(3)基于隐身性能考量,该无人机在隐蔽突防过程中,建议使用控制方案3、4、6,进行横航向控制,非隐蔽突防的飞行中可以使用控制方案1、2、5。
参考文献:
[1]岳奎志.作战机RCS的静态与动态特性分析[M].北京:北京航空航天大学出版社,2016:1.
[2]梁爽,滕杰,等.舵面偏转对机翼RCS影响仿真与分析[J].航空科学技术,2017,28(06):9-14.
[3]Greengard L,Rokhlin V.A fast algorithm for particle simulation[J].Journal of Computational Physics,1987,73(2):325-348.
[4]F.Rpger,Harrington.Filed Computation by Moment Methods[M].New York:McMillan,1968.
