液压系统群的相邻交叉耦合同步自抗扰控制
2020-08-26卢子帅赵静一秦亚璐任文斌李志博
卢子帅, 蔡 伟, 赵静一, 秦亚璐, 任文斌, 李志博
(燕山大学 机械工程学院, 河北 秦皇岛 066004)
引言
由于多车运载方案的模块与模块之间可任意进行拼车联合作业,所以在重大工程领域中应用广泛。多台液压载重车联合作业时常需要平稳的顶升重物,因此对各悬挂之间的协同响应过程的优化是关键。许多国内外研究者已对同步策略进行较深入研究,通过计算机控制技术与实时监测技术来提高载重运输车的易操控性与可靠性[1]。早期对双缸同步控制多使用并行和主从协调控制策略,由于并行策略无法联动抗扰、主从控制只能单向抗扰,使得系统同步精度不够理想,之后KOREN[2]提出将两缸输出位移作差,然后将得到的位移偏差值通过补偿器对两缸位移进行补偿,虽然保证了协同性但执行机构较多时系统会变的复杂。SHIH等[3]在此基础上提出多缸的相邻交叉耦合控制结构,即只考虑每个缸相邻两缸同步性,在得到较好的同步表现同时简化了系统。杨彦琳等[4]基于改进的相邻交叉耦合控制策略结合滑模变结构控制提出的四缸同步升降控制方法具有理想的同步效果和鲁棒性。赵静一等[5]提出“面追逐式”新式调策略能使被调平面四角点保持一个平面,也保证了顶升过程的稳定性与同步性。
可见,通过改进控制方法可以实现较高同步精度,但改进的控制结构未考虑多机构运行受扰动所引起系统调整时间变长的问题。本研究设计一种“相邻交叉耦合+自抗扰”控制方法,搭建了悬挂群模型进行联合仿真,并进行了现场试验,综合评价设计的控制策略能否在保证同步精度的基础上实现快速响应。
1 控制策略介绍
1.1 拼车策略
本研究的液压载重车为二轴线式,同步升降动作主要由悬架群系统协同完成,为了使后续控制系统的研究相对简化,将下图1中的C,D位置悬挂看为一组,即每车由4点支撑变为3点支撑[6],两车8组悬挂视为6组悬挂,车间采用CAN总线技术实现软连接。由于多车联合作业会出现偏载工况且油缸与其支撑机构刚性连接导致耦合性强[7],采用传统的控制方法效果不佳,为此悬挂群的同步控制采用相邻交叉耦合控制方法。
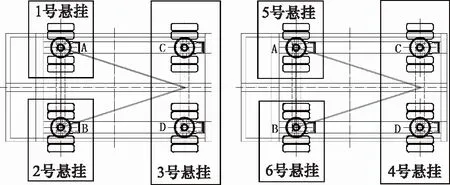
图1 悬挂分组示意图
1.2 自抗扰控制策略
多车联合进行作业时液压悬挂群系统成为典型弱刚度系统[8],而基于PID控制原理开发的自抗扰控制技术可抑制内外扰动对系统稳定性的影响[9-10]。自抗扰控制器主要由3个部分组成(如图2所示):非线性跟踪微分器、非线性校正反馈控制器、扩张状态观测器。跟踪微分器可跟踪阀控缸系统各阶微分,扩张状态观测器与反馈控制能够对系统中的扰动进行前馈补偿从而实现自动抗扰。
2 自抗扰同步控制器设计
2.1 建立悬挂单元近似模型
本研究的液压载重车采用负载敏感变量泵与比例负载敏感多路阀组合来完成悬挂群的动力匹配,这样的组合可使多执行器在同步工作时互相不影响且更加节能[11]。由于悬挂群中每个子系统相同且自抗扰控制策略并不依赖被控对象具体的数学模型,仅需知道系统的“相对阶数”[12]。所以下面建立其中1个子系统的简化模型,即图3所示四边滑阀与非对称缸系统模型,该系统工作在速度控制阶段,阀口开度理论上与速度成正比。

图2 自抗扰控制器结构

图3 阀控非对称缸系统示意图
根据各阀口的节流公式、流量连续性方程、力平衡方程建立非线性状态方程后转换为线性空间内的状态方程为下式:
(1)
式中,x1,x2,x3—— 系统状态向量的分量
y—— 输出信号
u1—— 线性系统的控制量
u1=h(x)+k(x)u
(2)
式中,h(x) —— 状态矩阵
k(x) —— 输入矩阵
对式(2)中u1进行变换,即得非线性系统的控制量u,即:
u=(u1-h(x))/k(x)
(3)
当完成反馈线性化后,线性系统状态方程的阶数为3且单个阀控缸内动态子系统稳定。
2.2 建立自抗扰控制结构
根据实际系统,在Simulink中搭建了自抗扰控制器与被控制对象的模型框图以确定各输入与输出的关系,包括微分跟踪器(TD)、反馈控制器(CTRL)、扩张状态观测(ESO)部分如图4所示。In1为1号悬挂的输入位移,In2与In3为与1号相邻的2,3悬挂的输入位移,In4为1号悬挂的实际输出位移,通过ESO与CTRL环节实现误差的观测、对比与补偿,该控制器与相邻交叉耦合策略共同控制悬挂群。
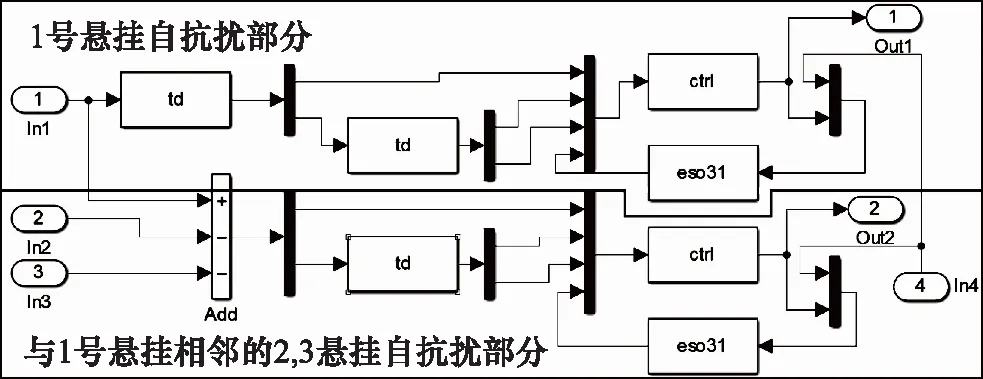
图4 自抗扰同步误差控制器
2.3 自抗扰控制器各环节设计
根据设定值v0安排过渡过程,因为上述分析子系统为三阶系统,因此利用2个跟踪微分器实现期望位置信号、速度信号、加速度信号的过渡过程:
(4)
式中,v0,v1,v2—— 分别为期望位移、速度、加速度
h—— 滤波因子
r0—— 速度因子
使用四阶线性扩张状态观测器,通过观测器可以观测系统扰动:
(5)
式中,e—— 误差信号
b0—— 自抗扰控制参数
z1,z2,z3—— 扩张状态观测器输出
z4—— 系统扰动量估计值
γ01,γ02,γ03,γ04—— 扩张状态观测器可调参数
状态误差的反馈律使用线性组合:
(6)
式中,e1,e2,e3—— 位移误差、速度误差、加速度误差
k——系统传递函数的阻尼系数
以及扰动补偿过程:
u=u0-z4(t)/b0
(7)
3 悬挂系统仿真
3.1 建模及参数设置
在AMESim中建立单车液压悬挂系统仿真模型如图5(为表示清晰只体现出实线框内1号悬挂子系统),主要包括电机、恒功率变量泵、负载敏感多路阀、悬挂缸、溢流阀等[13]。该负载敏感控制系统可以适应负载变化使系统达到良好匹配状态并且达到节能的目的[14],系统额定压力为30 MPa。仿真模型建立后基于样本对系统参数取值见表1。
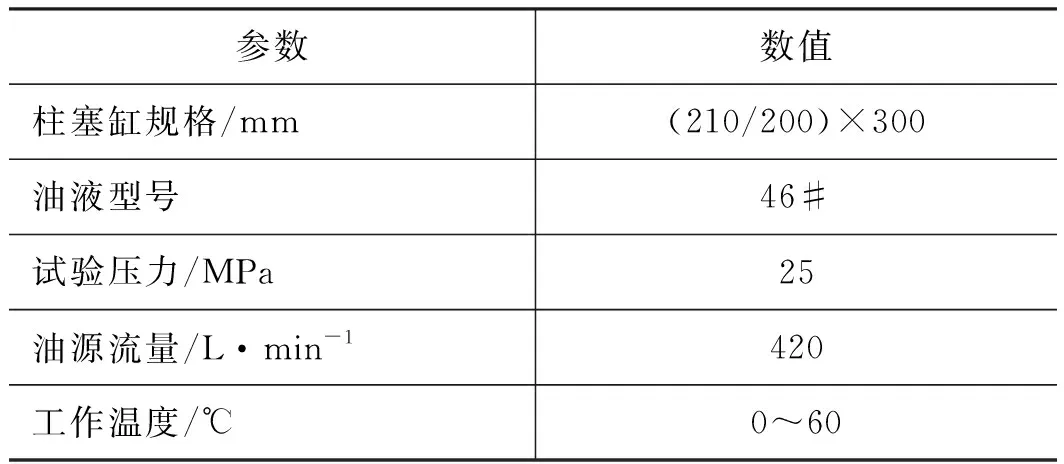
表1 平板车悬挂系统参数
3.2 仿真结果分析
由于实际工况各悬挂的工作状态不同,进行仿真时将1,2号悬挂负载设置为20 t,3,4号悬挂负载60 t,5,6号悬挂负载30 t,仿真时间30 s,分别输入阶跃信号与随机正弦信号来观察系统的响应。
1) 设置阶跃信号为期望控制信号
设置信号的期望位移为0.2 m,采用相邻交叉耦合+自抗扰控制策略时,如图6a所示悬挂系统群的同步误差在-0.2~0.3 mm之间,且其中最大误差组为1号悬挂与3号悬挂之间的位移误差、1号悬挂与4号悬挂的误差,系统响应时间大约为10 s;应用相邻交叉耦合+PID控制方法时如图6b所示,各缸同步过程中调整时间较长约为20 s,悬挂系统群的同步误差范围在-2~4 mm之间,由此可见自抗扰控部分使得控制效果理想。
2) 设置随机正弦波型信号为输入信号
正弦波信号幅值为0.2,频率为0.5π,采用相邻交叉耦合+自抗扰控制方法时,即图7a所示悬挂系统群的同步误差在-0.2~0.2 mm,且其中最大误差曲线为1号悬挂与3号悬挂位移误差曲线、1号悬挂与4号悬挂曲线;响应时间约为10 s,且正弦波型幅值稳定,多缸跟随效果好;当采用相邻交叉耦合+PID控制方法时如图7b所示,悬挂系统群的同步误差范围在-2~4 mm之间,且正弦波型幅值不稳定,跟随效果较差,综上可见采用相邻交叉耦合+自抗扰控制方法的控制效果理想。

图5 单车负载敏感控制系统AMESim模型

图6 给定阶跃信号时各缸位移误差
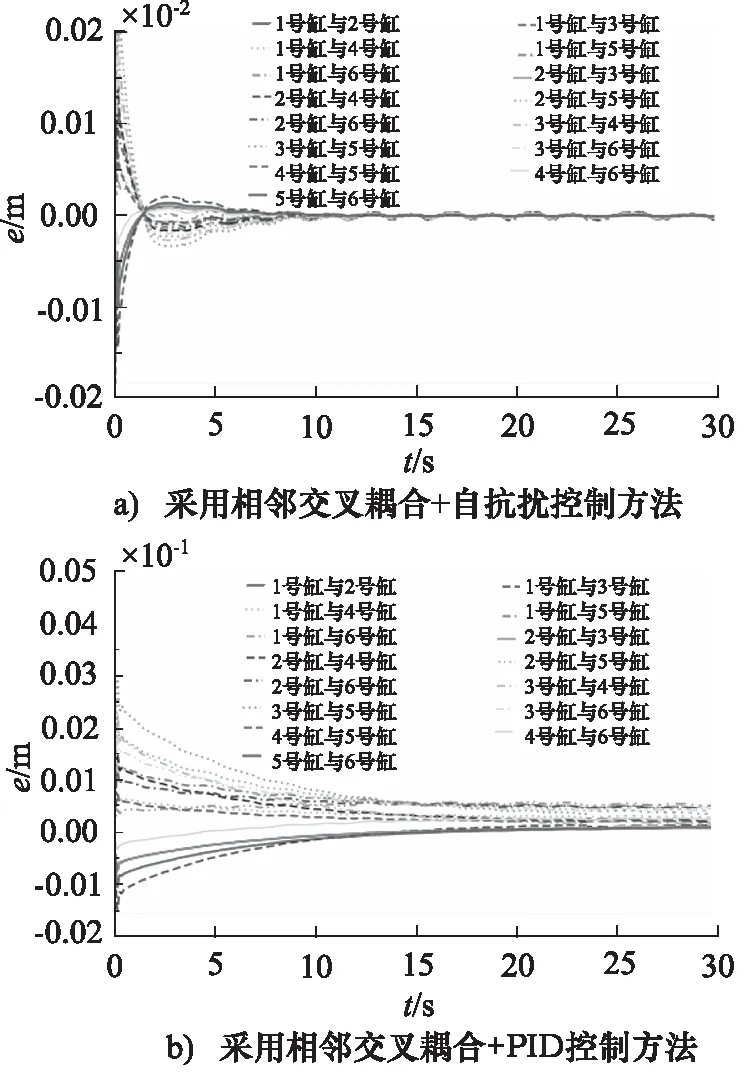
图7 给定正弦跃信号时各缸同步误差
4 同步性试验
为验证所提出的液压系统群协同控制方法的同步性能,利用两辆100 t双轴线液压载重车进行试验,图8为悬挂群同步试验现场,车辆自重28 t,载重平台长11500 mm、宽5100 mm、升降行程700 mm,且两车C,D位悬挂标为一组,在六组悬挂上安装位移传感器并标号1~6。通过对比位移误差较大的1号悬挂与3号悬挂、1号悬挂与4号悬挂,来验证相邻交叉耦合+自抗扰控制方法的同步精度与快速性。

图8 联合作业拼车试验
在实验过程中将不同质量重物放在两车载重平台上,使两车在偏载工况下进行同步顶升实验,试验从加载初始位置开始到悬挂油缸上升将重物抬升300 mm结束,从控制器直接采集的1号悬挂与3号悬挂位移误差、1号悬挂与4号悬挂误差试验曲线如图9a所示;图9b为输入阶跃信号时1-3悬挂位移误差、1-4悬挂位移误差的仿真曲线;图9c为输入随机正弦信号情况下1-3与1-4悬挂位移误差的仿真曲线,通过对比仿真可知系统的性能曲线与实验曲线基本吻合,验证了多车联合作业悬挂系统采用相邻交叉耦合+自抗扰控制的同步性理想。悬挂各标定点最大相对位移与仿真结果有偏差,这种现象发生的主要原因是车辆在顶升重物时相当于逐渐加载的过程,此过程中会发生重心的偏移造成试验误差比仿真略大。
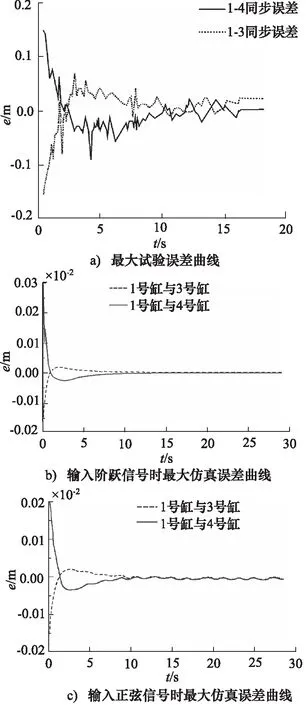
图9 最大仿真误差曲线
5 结论
通过对液压悬挂系统的同步控制进行分析,研究一种相邻交叉耦合+自抗扰的控制方法,并搭建了悬挂系统群模型和控制系统模型, 通过联合仿真方法对比采用相邻交叉耦合+PID与相邻交叉耦合+自抗扰这两种控制方式在两种不同输入信号下的同步误差得出,液压悬挂群的同步控制采用相邻交叉耦合+自抗扰的控制方法在具有较高同步精度的同时有着较快到达稳定状态的能力,同时具有较强的适应性和鲁棒性;最后对两车联合作业时的悬架液压系统进行同步性实验,得到了悬挂群采用相邻交叉耦合+自抗扰控制策略的最大同步误差组曲线,同时验证了系统的正确性与可行性,为多车联合作业悬挂系统同步控制的优化和改进提供了参照基础。
