一种UWB 协作式定位方法
2020-08-25欧阳文蒋理兴罗豪龙李雪强
欧阳文,蒋理兴,罗豪龙,郑 凯,李雪强
(1. 信息工程大学 地理空间信息学院,郑州 450000;2. 61618 部队,北京 100080)
0 引言
无线定位技术在军事地理定位,移动通信网络和智能交通方面具有广泛应用[1]。在室外,全球定位系统(global positioning system, GPS)已经能够提供完好的位置信息。由于楼层遮挡、多径干扰等因素,这种定位方式无法正常工作。这种情况下,利用红外线、无线保真(wireless fidelity, WiFi)、紫峰(Zigbee)等载波技术成为有效的室内定位方案[2],但由于各自的局限性都没有非常好的效果。超宽带(ultra-wide band, UWB)技术占用带宽极大,具有成本低、传输速率快、抗多径和定位精度高等优点,成为IEEE802.15.4a 标准作为定位应用的首选技术[3],因此成为解决室内高精度定位的一大研究热点。
UWB 定位是通过测距或测向来完成,一般包括以下 3 种方法[3-4]:①基于到达时间(time of arrival,TOA)或到达时间差(time difference of arrival, TDOA)估计;②基于到达角度(angle of arrival, AOA)估计;③基于接收信号强度(received signal strength indication, RSS)估计。文献[5]提出了1 种基于TOA 的分布式最大似然估计(maximum likelihood estimation, MLE)方法,通过利用邻居节点的位置估计来更新本节点位置和距离,最后用迭代算法估计每个节点的位置。文献[6]中还提出了类似的分布式 MLE 方法,用于基于 TOA 的高斯测距误差的协作定位。本文实验是在TOA 测距方法上进行的,通常情况下,3 个及3 个以上基站能对物体的平面位置进行 2 维定位,通过迭代算法能获取较为准确的坐标[7]。在基站数据缺失或者在非视距(non line of sigh, NLOS)条件下,无法获取 3 个及以上的有效距离信息,需要考虑协作定位,将相邻标签的距离加入定位模型形成拓扑结构,对协作定位模型进行迭代解算。本文针对标签接收基站数量的多少,提出1 种解算策略,不同的情况采取相应的定位模型解算。
1 UWB 定位方法
本节对UWB 定位的3 种方法进行介绍,这几种方法在原理、计算复杂度、设备成本、测距精度等方面各有利弊。对几种定位方法进行比较,并给出它们的优缺点。
1.1 AOA 估计方法
AOA方法是利用天线阵列来感知基站信号的到达方向,测量出标签与通信范围内基站的夹角信息,计算出基站和标签之间的相对方位,如图1 所示。
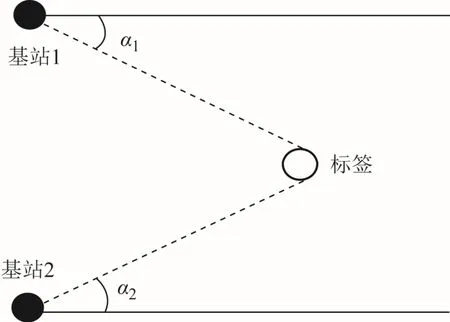
图1 AOA 测距方法
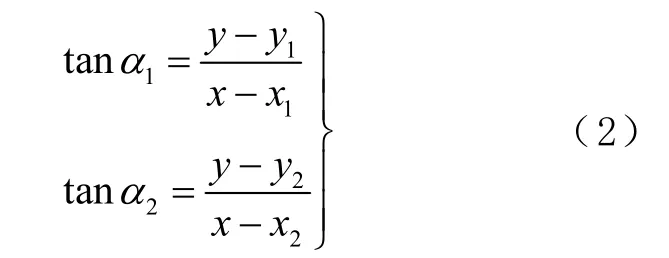
信号接收端和发射端可以绘制1 条方位线,2 个方位线的交叉点就是未知节点的位置。这种方法需要昂贵的天线阵列来估计AOA 的测量值,不需要任何的时钟同步。假设从第i个信号接收器处发出的AOA 表示为iα,则可以得到

式中:x、y为标签的横、纵坐标;xi、yi为第i号基站的横、纵坐标。
通过式(1)可联立2 个基站方程式,即可求得移动点的待测坐标为
1.2 TOA/TDOA 估计方法
TOA/TDOA 都是基于时延的估计方法,要求基站和标签之间有严格的时间同步。它充分利用了UWB 信号具有较高的时间分辨率特性,体现出高精度定位的优势。图2 给出了TOA 和TDOA 定位原理图。

图2 TOA/TDOA 方法
图 2 中:A、B、C表示基站;T表示标签(基站信息已知,标签信息未知)。为获取标签的2 维坐标,TOA 通过测得基站到标签的时延估算距离,通过平面中3 圆交汇法得到标签的位置[8],见图2(a)。TDOA 则是获取时延差,每 2 个基站可以估算出 1 个距离差,标签位置位于双曲线的某一分支上,根据其到 2 个基站的时间快慢决定,利用 3 个基站获取 2 组时延差就可以解算出标签的位置,见图2(b)。
1.3 RSS 估计方法
RSS 的测距原理是,基站发射功率大小为已知的信号,在标签端接收测距信号的功率,利用路径损耗模型计算基站到标签的距离信息[9]。对于2 维平面的未知标签,需要 3 个基站来确定标签的坐标,定位模型与TOA 方法类似,获取的值为接收信号强度指示(received signal strength indicator,RSSI)值。考虑多径、NLOS 传播等影响,传播损耗模型[10]为
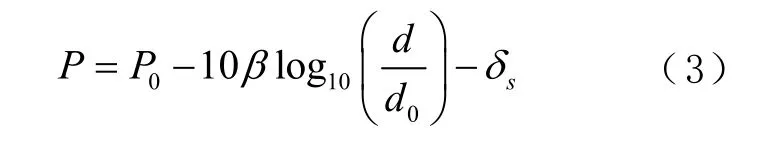
式中:0P表示在距离发射天线d0位置时的接收功率;d表示发射端到接收端之间的距离;d0表示参考距离,在室内通常取1 m;β表示路径损耗指数;sδ表示路径损耗误差,服从均值为零方差的高斯分布。
1.4 测量模型比较
针对4 种测量模型,对比分析了了它们之间优点和缺点,结果如表1 所示。
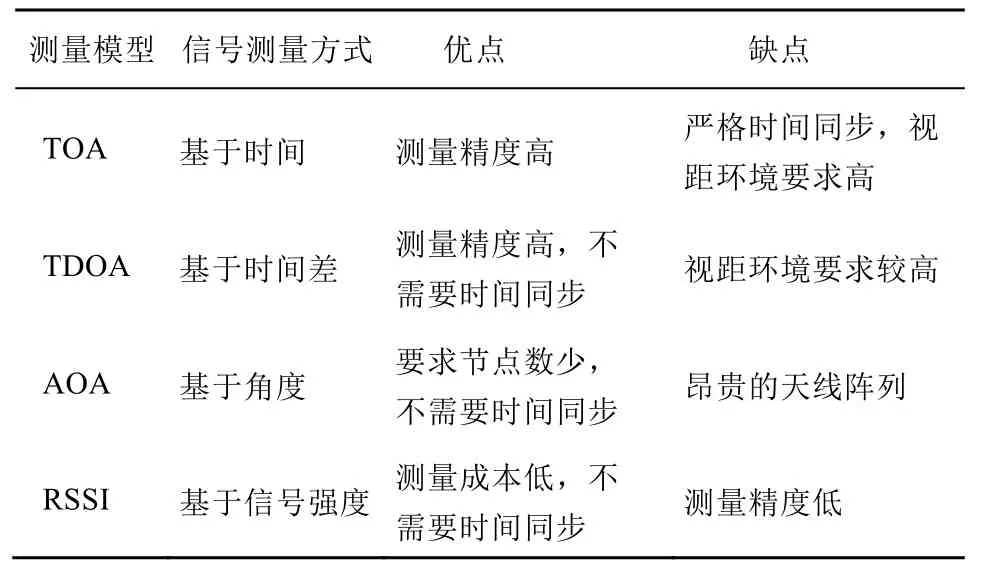
表1 几种测距模型比较
考虑到TOA 测量模型精度高的特点,本实验的UWB 定位设备采用TOA 测距方式,同时保证各个UWB 设备的时间同步。
2 定位模型求解
文献[10]定义了 3 种最大似然估计的定位方式:原子式、协作式和重复式。图3 给出了这3 种定位方式。

图3 3 种最大似然估计方法
图3(a)为传统的最大似然估计定位模型,通常情况下,利用3 个基站就可以解算出标签的坐标,多余基站的信息可以增加冗余条件,加入平差解算提高精度。图 3(b)为协作式定位的 1 个 2 维拓扑结构示例,协作式定位是指如果 1 个节点能够获得足够多的信息,形成 1 个由多个方程式组成并拥有唯一解的超限制条件或限制条件完整的系统,那么就可以同时定位1 组节点。图3(c)中节点的解不唯一。
2.1 原子式定位方程
定义基站数为 4 个、标签数为 1 个的定位场景。在理论情况下可以解算出标签的坐标,并且有1 个多余观测量。根据定位方式列观测方程为

式中:di为第i个基站到标签的距离;xi、yi为基站横、纵坐标;Δhi为基站与标签的高度差,
将式(4)观测方程用泰勒级数展开[11]并线性化后有

由式(5)列误差方程有

根据误差方程V=L-AX有

根据平差理论,方程V=L-AX的解为

单位权中误差为


2.2 协作式定位方程
定义基站数为4 个、标签数为2 个。根据定位模型可得观测方程为
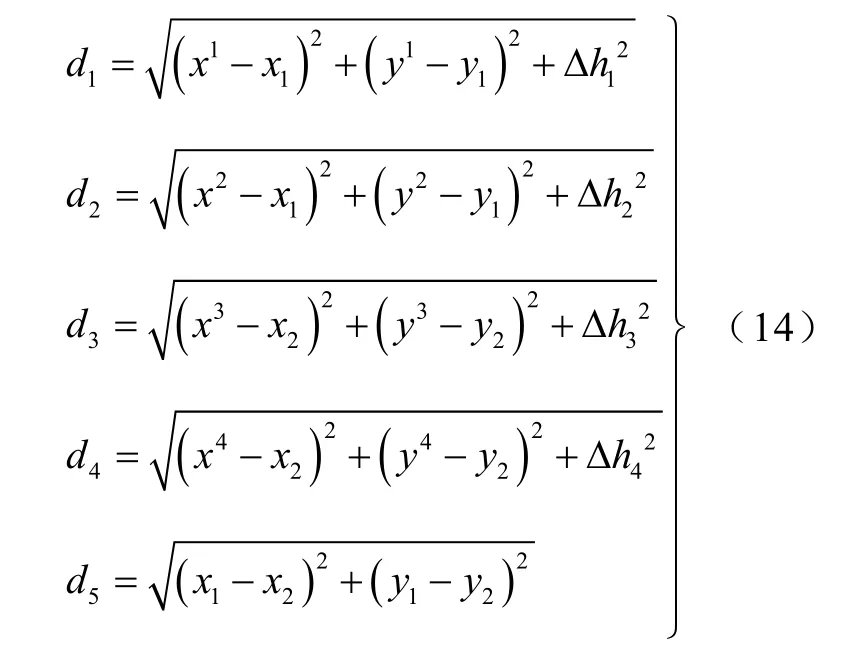
将式(14)用泰勒级数展开并线性化后有
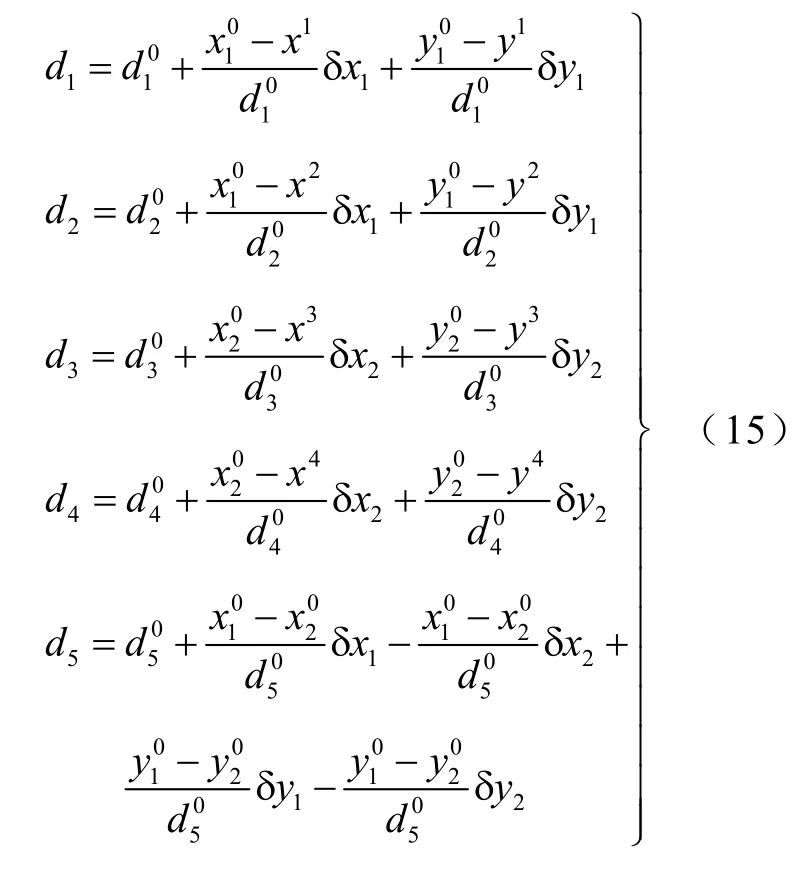
由式(15)列误差方程有
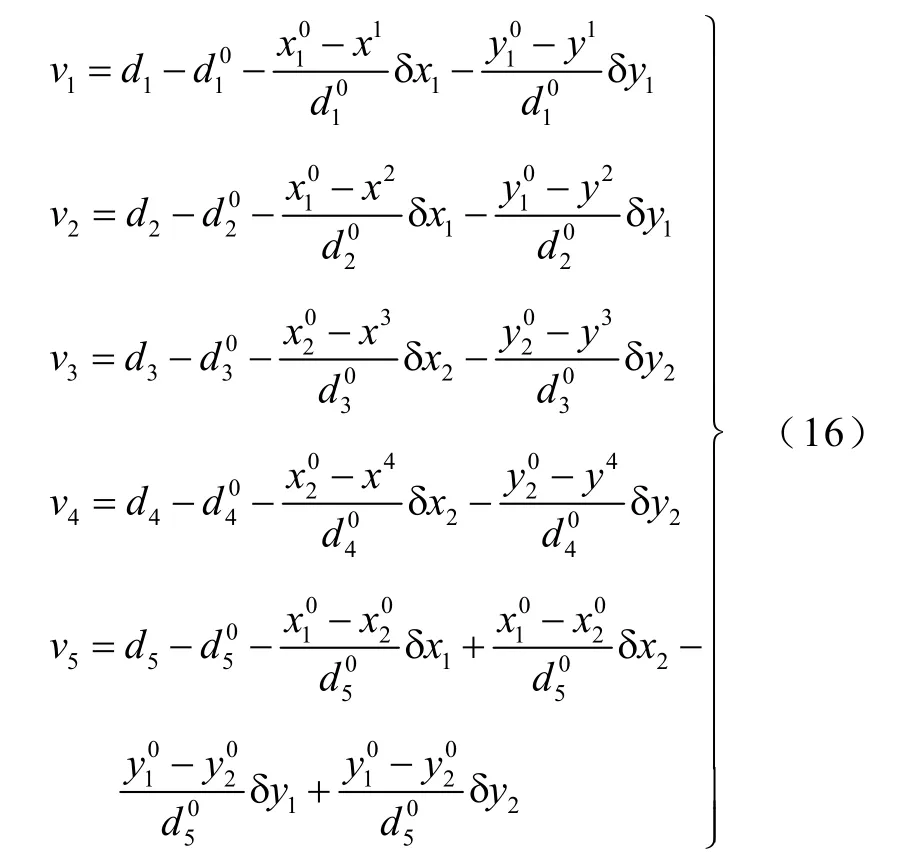
根据V=L-AX有

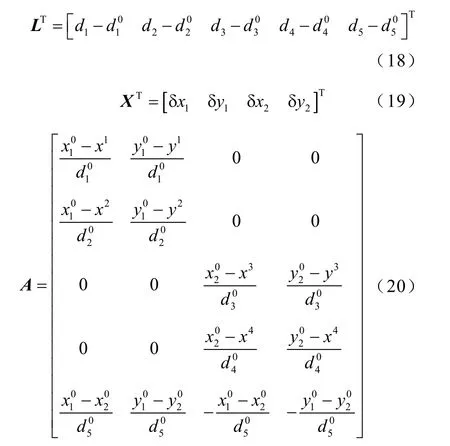
根据平差理论,方程V=L-AX的解为

单位权中误差为

根据最小二乘迭代可以近似求解出 2 个标签的坐标并且评判精度,2 个标签的近似解为
2.3 协作式定位解算策略
在UWB 定位环境中,NLOS 因素和基站数据的丢失会影响到标签的定位[12],在这种情况下,需要选择合适的定位解算方法。考虑到标签定位的实际情况,根据标签接收到基站距离数量的多少,将UWB 定位标签分为以下类型:
1)T3,可接收 3 个及以上基站距离的信息,存在多余观测量;
2)T2,只能接收到2 个有效的基站距离;
3)T1,只能接收到1 个有效的基站距离。
不考虑标签无法接收到任何 1 个基站距离信息的情况。采取的解算策略如表2 所示。
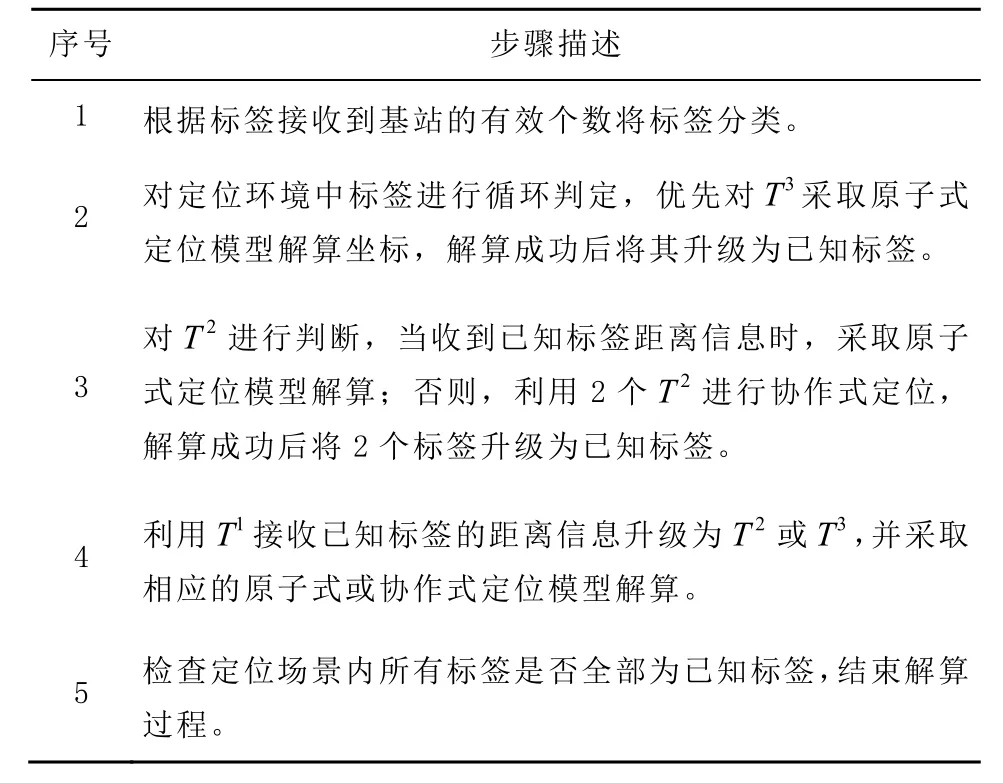
表2 UWB 集中式解算策略
3 实验与结果分析
3.1 场景布置
按照协作式定位模型对基站和标签进行布置,模型如图4 所示。
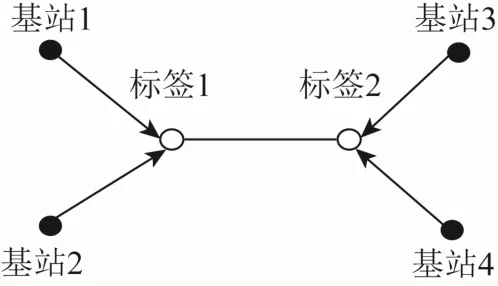
图4 实验场景模型
实验过程中,2 个标签同时获取4 个基站的距离信息。在解算时,为了同时对 2 种定位模型的结果进行求解,人为选取不同数目的基站和标签进行解算。利用2 个标签接收4 个基站的距离信息得到原子式解算结果;利用标签1 接收的基站1、基站2 的距离信息,标签2 接收的基站3、基站4 的距离信息以及标签之间的通信距离得到协作式解算结果。
设备及实验环境如图5 所示,UWB 设备安装在三角架上,如图5(a)所示;实验场景在室内空旷的视距环境中,如图5(b)所示。
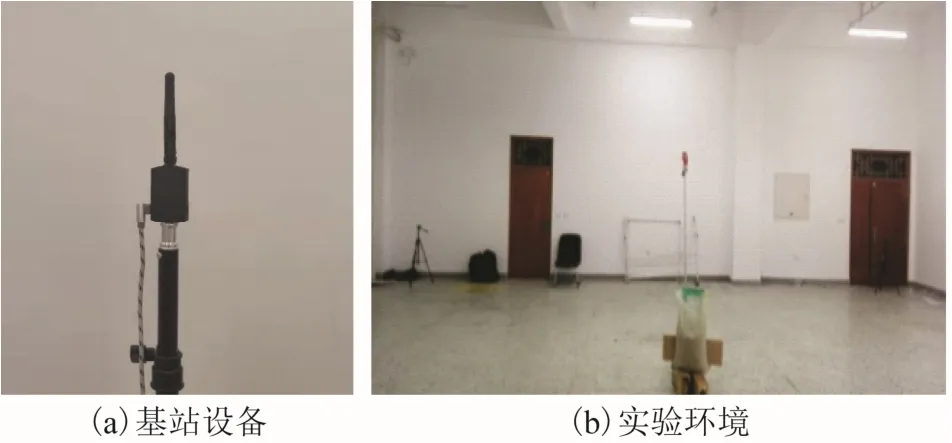
图5 设备及实验环境
利用全站仪对基站和标签进行坐标标定,得到基站和标签的真实值如表3 所示。

表3 基站和标签标定真值
3.2 数据处理及结果分析
利用UWB 定位系统对2 个标签进行测量,获取标签到基站的距离信息;采集200 个数据点,对数据进行坐标解算。
对标签1 采取原子式定位方法解算,结果如图6 所示。

图6 标签1 原子式定位解算结果
对标签2 采取原子式定位方法解算,结果如图 7 所示。

图7 标签2 原子式定位解算结果
对2 个标签进行协作式定位解算,结果如图8所示。

图8 协作式解算结果
对2 种定位解算精度进行计算,得到的结果如图 9 所示。图 9 中每 1 张图形位于上方的实线为采用协作式定位解算出的坐标精度,下方虚线为原子式定位解算出的坐标精度。图 9 表明,2 种定位模型解算的精度不在1 个量级。

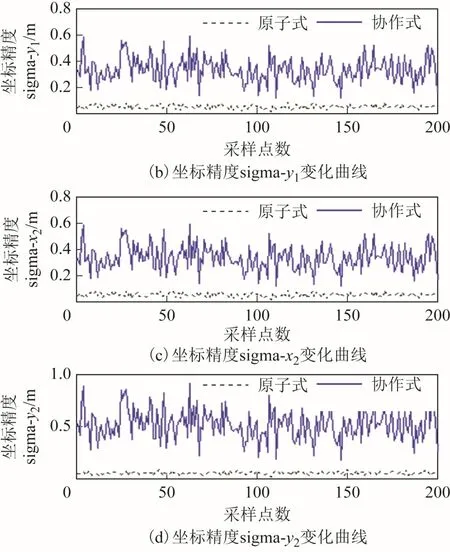
图9 解算精度
平均坐标精度经过计算如表4 所示。

表4 平均坐标精度
从结果数据来看;采用原子式定位解算方法,定位精度在厘米级;而采用协作式定位解算方法,虽然能够得到合理的定位结果,但精度会下降到分米级,不利于进行高精度的定位,对定位精度要求不高的场景适用。
4 结束语
本文对UWB 定位技术进行了介绍,分析并推导了 2 种定位模型的解算方程,提出了 1 种协作式集中解算策略。实验数据表明,原子式的单点定位方法精度在厘米级,而协作式定位方法相比单点定位精度下降到分米级。动态情况下精度没有进行实验评价,这是下一步需要完善的方向,为UWB 协作式定位提供1 种参考性解决方案。
