圆形喷灌机精准同步监控系统的设计
2020-08-16李妙祺杨小平冯全
李妙祺 杨小平 冯全


摘 要:为了实现三跨圆形喷灌机电机精准同步并达到提高灌水均匀度的控制目的,本系统使用变频器配合主行走电机进行了同步控制,并使用可编程逻辑控制器及人机界面,设计了圆形喷灌机的监控组態系统,同时具有手动控制功能。该系统能够显著提高喷灌作业时的灌水均匀度,有利于作物生长,提高农业生产效率。
关键词:圆形喷灌机;PLC;HMI;变频器
中图分类号:S275.5 文献标志码:A 文章编号:2095-2945(2020)23-0095-04
Abstract: In order to realize the accurate synchronization across three circular sprinkler motor and reach the control goal of improving irrigation uniformity, the control system of center pivot irrigation machine was designed by using frequency converter to control the main motor and using programmable logic controller and human-machine interface. It also has manual control function. The system can significantly improve the irrigation uniformity during irrigation, which is beneficial to the efficiency of crop growth and agricultural production.
Keywords: center pivot sprinkling machine; PLC; HMI; inverter
引言
喷灌技术是一种节水灌溉技术,我国对喷灌技术的研究始于1953年,圆形喷灌机是一种大规模、高自动化程度的灌溉用机械。早期的圆形喷灌机多使用电机驱动行走地轮并且配备机械减速装置,通过百分率计时器进行计时并控制不同跨电机的启停,使塔架车一个跟着一个绕着中心支轴旋转,从而实现了连续自移喷洒作业。随着工业技术的发展,自动化技术已经在喷灌系统中得到了广泛应用,而我国在技术开发方面尚存在一定的差距,尤其体现在:控制精度差、行走速度无法自整定、灌溉的均匀度低等问题[1]。
为了解决以上问题,需要引入基于可编程控制器的精准同步控制系统,利用光电传感器检测相邻塔架的角变位,从而控制变频器调整电机转速,使塔架支撑的灌溉用水管道尽可能保持在一条直线上,并且限制安全控制角不大于1.5°。
1 圆形喷灌机控制系统总体设计
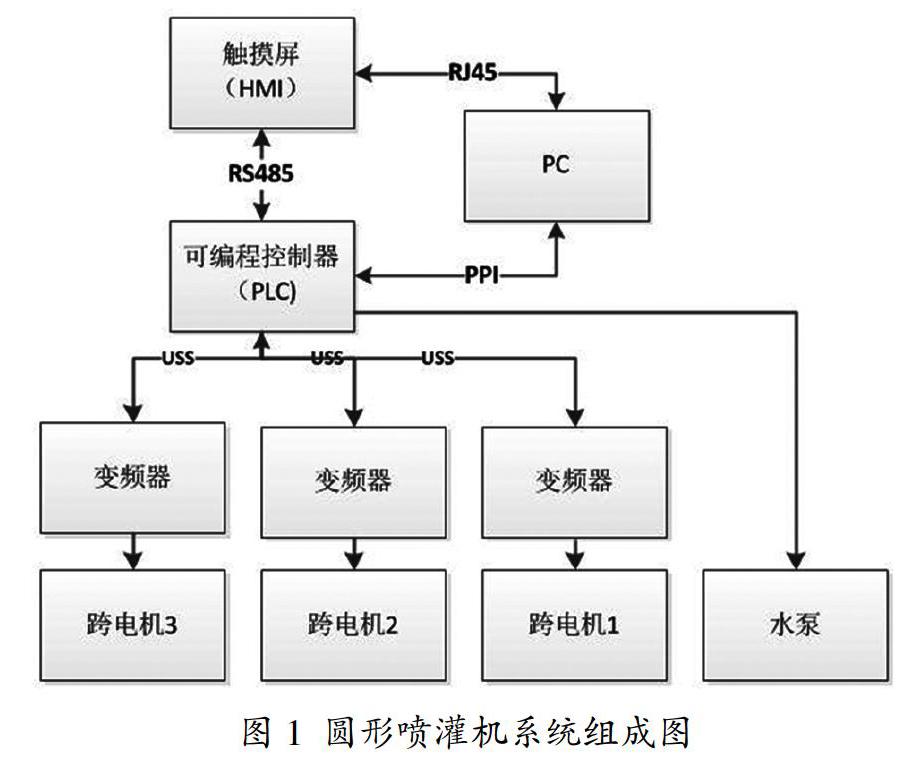
本设计中的喷灌机共有三跨,长度均为57m,三跨总长171m,每一跨由一台三相可调速变频电机驱动行走轮带动其移动。若考虑圆形喷灌机喷灌作业过程中会遗失圆形区域以外的地块,则可以给最远跨加一15m的悬臂。在设计过程中,由于考虑成本等因素,将主控PLC选择为西门子S7-200CPU226机型,PLC接受来自手动控制部分的各跨电机启停及反转信号(手动部分亦可在人机界面上进行操作),另外采用光电开关进行相邻两跨扭转角度检测,当相邻两个塔架扭转角度不超过1.5°时,保护机构不启动,PLC依据人机界面(HMI)上操作员设定的灌溉时间和水量进行自动计算,分析每跨电机的行走速度,控制变频器启动电机并合理调速,同时在整个生产过程中监视设备运行状态,在系统发生错误、危险状况时能够及时报警、自矫正或切断电源线路。当工作时长到、或灌溉水量到达预设值,则设备停止喷灌作业。其系统组成图如图1所示:
2 系统硬件选择及系统接线
2.1 喷头的选择
喷头的选择是设计圆形喷灌机灌溉项目时应考虑的主要因素。喷头的间距以及类型是两个主要变量。在喷灌机的作业过程中,一跨走最快,三跨走最慢。喷灌机运行一周,若要保证所有区域灌水均匀,则需自远端至中心支轴逐渐减小喷洒水量,并采用散射式喷头,根据喷头工作压力,在喷头进水口上游配置适当的压力调节器。喷头宜采用悬吊安装方式,悬吊的高度由作物高度确定。
本设计采用可变孔口尺寸的喷头实现变量喷洒[3],由于靠近中心支座处的覆盖面积相对小,只需很小的水量,所以喷嘴尺寸也非常小。在中心支轴较远的桁架中,所需的水量增加,喷头的喷嘴需要加大,以满足水量增加的需要。配置喷头时,输水管某一管段处的流量值,应该与该处灌溉的圆形面积之比为常数[5],计算公式如下:
式中Q为总流量,QE为末端喷头的流量,Qi为主管道的第i段的通过流量,ri为管道至中心支轴的距离,l为主输水管道的长度。
2.2 电机及变频器的选择
驱动装置采用有过流过载保护的2.2kW变频三相异步电动机带动行走轮移动,采用变频器调速的系统由于转速可调,故可选择不同直径的行走轮(本设计车轮外径为1.28m),速度由变频器进行调整,也可由操作人员通过人机界面键入,系统自动处理相关数据的运算,电机相关参数见表1。
变频器选择西门子MM420型,采用单一的RS485主从链路通过USS协议链接3台跨电机,在使用该协议之前,需要在变频器中对驱动装置进行基本参数设置、控制源参数设置及通信设置。
2.3 系统接线图
系统外部接线图如图2所示。MA0是给整个喷灌作业提供输水动力的水泵。MA1、MA2、MA3分别为三跨行走电机。其中MA1为距中央支轴最远端电机,所有跨的行走电机都能够分别实现正反转及无极调速。PLC主机CPU226,数字量24I/16O,具有两个RS485口。CPU模块采用RS485网络与变频器进行USS通信连接,波特率9600。CPU主机用周期电报通信的方式轮番询问各个变频器的状态信息。BG1至SF5接主机数字量输入端子,系统工作指示灯PG0、PG1及控制水泵的接触器线圈接输出端子,其功能及端口分配见表2。HMI为西门子公司的Smart 700IEV3,带RS422/485隔离串口通信,最大通信速率187.5Kbits/s。
3 控制系统软件设计
软件控制流程:
本系统分为手动部分和自动控制部分,控制功能描述如下:
(1)模式自主选择:根据实际情况和用户需要,手动模式和自动工作模式自主选择,在自动模式下,只要切入手动则自动模式全部停止。
(2)智能控制:可编程逻辑控制器根据从设备采集的实时数据自动做出判断对灌溉设备进行控制。
(3)信息实时显示:实现跨电机行走速度、当前位置的实时显示,方便使用者确认和系统调试。
(4)数据自动采集:在不需要人工干预的情况下,进行灌溉时间的计时和灌溉用水量的自动采集。
(5)人机界面操控: 由于各种农作物在生长的各个阶段对水分的需求不同,为达到最适宜农作物的需水量,可视情况通过人机界面调整灌溉轮次、时长及水量。
自动控制部分系统控制流程如图3:
4 组态界面设计
在图4的欢迎界面中可以选择手动或自动控制,选择手动后进入图5的手动控制画面,其控制功能与PLC输入端子的按钮控制功能相同,若开机后选择自动控制则进入图6的参数设置及电机状态监控画面,本功能需要先对生产参数进行设置后机器才能启动。在图7的运行监控画面可随时查看每一跨电机的当前运行位置和灌溉总水量及系统运行时长,同时,本系统还具有管理员权限设置和错误报警功能。
5 试验
由于户外试验不可避免地会受到自然条件的影响,例如蒸腾作用,风力等,其中通过多次试验比对,在多种气象条件下,不同的风速对试验数据影响最大,通过数据分析得到采用百分率计时器的控制系统的灌水均匀度(A)和采用速度调节装置的灌水均匀度(B)如图8所示。在图中可以看出,在采用了合理的行走方式控制后,该圆形喷灌机能够提高喷灌作业的灌水均匀度。
6 结束语
本设计通过触摸屏、可编程序控制器配合跨电机变频调速,通过操作触摸屏或手动控制按钮实现电动机、水泵的自动或手动的启动、停止。同时还可根据灌水量的要求自动实施喷灌作业,并且能够自动调整三台电机达到同步行走的目的。本系统能够现场或远程监控设备的运行,能及时有效的处理突发事件。通过合理的設备选型、参数计算和软件设计,达到提高普通喷灌机灌水均匀度的目的。
参考文献:
[1]钱一超,侯永胜,席三忠,等.影响电动圆形喷灌机灌水均匀度的因素及分析[J].节水灌溉,2010(4):20-22.
[2]张承国,韩登仑.DYP_235型电动圆形喷灌机的研制[J].中国农机化,2012(2):100-103.
[3]赵伟霞,李久生,栗岩峰.大型喷灌机变量灌溉技术研究进展[J].农业工程学报,2016(13):1-7.
[4]严海军,肖建伟,等.圆形喷灌机低压阻尼喷头水滴直径分布规律的试验研究[J].水利学报,2014,45(4):467-472.
[5]严海军,姚培培,等.圆形喷灌机喷头配置技术与软件研究[J].农业机械学报,2011,42(6):84-88.
[6]李保明,薛桂宁,等.中心支轴式喷灌机典型标准工程设计[J].中国马铃薯,2012,26(6):374-378.
