基于工艺因素统计量化的多工序制造质量建模
2020-08-14李伊张发平阎艳张田会周建华郭飞燕
李伊, 张发平, 阎艳, 张田会, 周建华, 郭飞燕
(1.北京理工大学 机械与车辆学院, 北京 100081; 2.北京机电工程研究所, 北京 100074; 3.北京动力机械研究所 总装中心, 北京 100074; 4.中国航空制造技术研究院, 北京 100024)
0 引言
近些年来,随着武器装备研发的不断深入,军工产品的功能性需求大都已得到满足,产品的质量及可靠性问题逐渐成为限制国防工业发展的瓶颈问题[1-2]。复杂武器装备的制造过程往往包含多道工序,不同于其他多阶段系统,多工序制造质量的形成过程具有一些独到的特点[3]:1)产品的最终质量是前序多道工序质量累积叠加的结果,而由于多工序之间复杂的影响关系,质量的累积过程并不是线性的;2)由于测量及认知的局限,工序质量及最终的产品质量并不是确定性的,其值往往围绕设计或工艺给定的公称值波动。相应的,这些特点给多工序制造质量分析带来两个主要的挑战:1)如何理解多工序制造的质量累积过程,从而对其进行合理地建模表达;2)如何进一步利用构建的模型对质量的波动进行有效地控制。
许多科研人员对产品的多工序制造质量分析进行了研究[4-6],但综合现有文献,许多问题依然没有解决:1)现有分析方法(如马尔可夫、贝叶斯网络等)中,产品质量的表达往往是属性值(如产品合格率),而不是计量值(如质量特性的准确分布);2)质量的分析过程往往只考虑某一个或某一类因素的影响,影响因素分析不全;3)现有方法大都是模型驱动,即质量影响因素(KCC)与质量输出(KPC)之间具有明确的解析关系,而随着产品复杂度的不断提升,KCC与KPC之间的关系往往没有解析表达,甚至连经验公式也没有。
针对上述挑战和问题,本文提出了质量传递综合模型(QTCM). 对影响产品质量的因素进行了全面地分析,并给出了以往研究较少涉及的操作者和设备因素的量化方法。采用数据驱动的方式构建了KCC与KPC之间的映射关系,实现了质量特性分布的准确评估与预测。在此基础之上,给出了确定产品质量波动主要KCC的解析算法,从而为产品质量的提升提供帮助。对某型号导弹发动机转子系统多工序装配过程的分析,验证了QTCM的有效性。
1 QTCM框架
QTCM的构建基于两个前提:首先,每一制造工序的输入和输出变量均为正态随机变量,且已知输入变量的概率密度函数;其次,各变量彼此独立。
典型的单工序制造过程如图1所示,过程分为3个阶段:制造准备阶段、制造过程阶段以及KPC输出阶段。图1中:F为KCC与KPC之间的映射关系;KCC来自于两个阶段,q1为一组来自于制造准备阶段的KCC,包括原材料质量或前序工序的KPC等,s为一组来自于制造过程阶段的KCC,包括机器设置(如机床主轴转速、刀具进给速度、动平衡机转速等设备预设参数)、制造过程工况参数(如环境温度、湿度、设备状态等)以及其他工艺因素(如螺纹拧紧力矩、操作者经验等);q2为一组KPC指标,可以包括尺寸、材料等属性,它也是后序工序的质量输入。
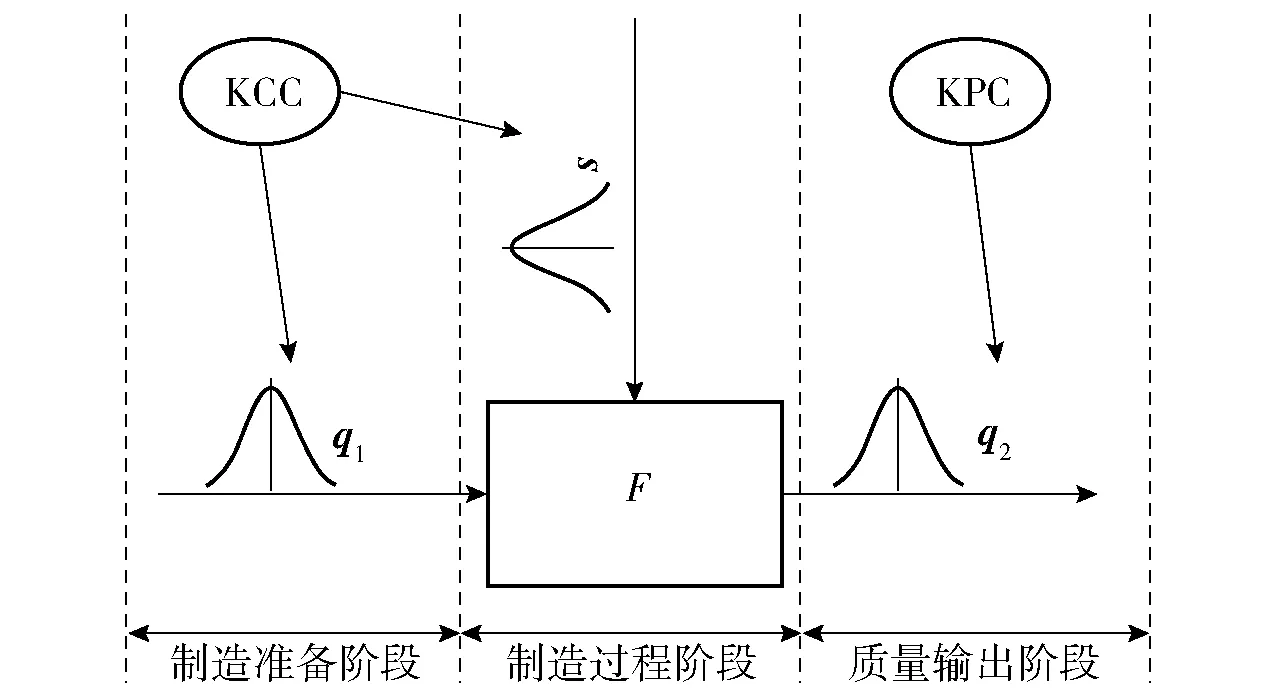
图1 单工序制造过程Fig.1 Single stage manufacturing model
图1所描述的过程可以用(1)式加以概括:
q2=F(s,q1).
(1)
(1)式描述了KCC测量值与产品KPC值之间的关系。由于KCC均为随机变量且已知其分布,因此可以借助其概率密度函数得到KPC的期望值,其表达式为
E(q2)=∬F(s,q1)f(s)f(q1)dsdq1,
(2)
式中:f(s)和f(q1)分别为s和q1的概率密度函数。
通过(2)式,可以进一步得到KPC方差的表达式:
(3)

(1)式~(3)式为单工序质量模型的解析表达,在实际应用中,这3式很难直接计算,因此尝试使用泰勒展开找到(2)式和(3)式的求解方法。制造参数往往围绕其公称值小范围波动,因此可以认为制造过程在公称点附近是线性的。利用泰勒展开式,将(1)式在公称点处做线性化处理:
(4)

由(4)式可得
(5)

由(5)式,借助均方根(RSS)方法[7],可以得到KPC方差为
(6)

在单工序质量模型的基础上,可以扩展得到多工序的质量模型,具有两道工序的连续多工序制造系统如图2所示。图2中:F1和F2分别为两工序中KCC与KPC之间的映射关系;s1和s2分别为两工序中来自于制造过程阶段的KCC;q0为工序1中来自于制造准备阶段的KCC.

图2 连续多工序制造过程Fig.2 Serial multi-stage manufacturing model
根据(6)式,多工序制造系统中任意工序的KPC方差可表示为
(7)
至此,便通过严格的数学推导,得到了制造质量模型的解析表达,(4)式和(6)式可以借助KCC的分布情况计算KPC的输出值及方差。但是,通过观察不难发现,KCC和KPC之间的映射关系F是必不可少的。在实际的工程问题中,具有解析表达的F是最方便的。但是,大部分的制造过程不能用解析的方式加以映射。
同时值得一提的是,本节讨论的质量模型构建前提是假设各输入变量独立,但实际生产工艺过程中,KCC之间可能存在相关性。这一问题的解决方案是在模型构建之前,可以采用正交变换[8]、Rosenblatt变换[9]、Nataf变换[10]、流形学习降维[11]等方式,将相关变量变换为互不相关的变量,或去除掉KCC数据之间的相关性,然后再运用上述方法进行产品制造质量的建模。
2 KCC的量化方法
影响产品制造质量的因素可以用6个方面加以概括,即:操作者、设备、原材料、工艺方法、测量和环境,这6个方面可以简写为5M1E[12]。在以往的研究中,由于具有明确的量化指标和方法,原材料、工艺方法、测量和环境4个因素被考虑的较多。相比之下,操作者和制造设备对KPC的影响很难量化,现有的质量分析模型大都没有囊括这两方面的因素。
2.1 操作者因素
操作者的复杂性和多样性使得对其影响程度的量化面临巨大的挑战。心理学文献[13]的研究成果表明,人的行为表现与其所受到的物理刺激之间具有如(8)式所示的指数关系:
O(ρ)=OM(1-e-ρ),
(8)
式中:OM是人在未受到任何外界刺激时的原始表现;ρ为对行为产生影响的外界刺激;O(ρ)为人在受到外界刺激后的行为表现。将这一研究发现应用到制造系统中,可以认为OM为操作者在未受到任何训练或干扰的情况下,完成制造任务的原始表现,ρ为对操作者的表现产生影响的因素,O(ρ)为操作者完成某一制造任务的能力。
结合(8)式,假设所有操作者的原始表现都相同,令原始表现OM=1,可以定义操作者在面对某一制造任务时的能力指数为
O(ρ)=1-e-ρ.
(9)
从定义中可以看出,0≤O(ρ)≤1,且(8)式中的ρ用向量ρ进行了替换,这是因为影响操作者表现的因素不止一个。结合多工序制造系统的特点,本文选择操作者在完成某一工序任务时所允许的思考时间、操作者的经验和任务的复杂度作为多工序制造系统中影响操作者表现的主要因素。下面分别对这3个KCC的量化方法及操作者能力指数的计算方法进行介绍。
2.1.1 思考时间
操作者在完成某一工序任务的总时长包括两个部分,即手动操作的时间和思考时间。思考时间是操作者在完成某一工序任务时,花费在比较、判断、回忆等必要认知活动上的时间。在多工序制造系统中,留给操作者的思考时间越多,往往意味着更高的制造质量。如果令T表示完成某一工序任务的总时长,T0表示完成该工序任务所必须的手动操作时间,那么思考时间Tt可以表达为
Tt=T-T0.
(10)
思考时间因素可以用(11)式加以量化:
(11)
式中:TM为完成工序任务所用时间的最大值,即使任务时间超过这个时长,也不会给工序质量的提升带来有效的帮助。由(11)式可以看出,0≤ρt≤1.
2.1.2 操作经验
经验是一个广泛且难以量化的指标,它取决于人的阅历、自主学习时间、重复完成任务的次数甚至生活方式。这里缩小“经验”这一概念的范围,认为多工序制造系统中的操作者经验为其完成某一制造任务时所达到的熟练程度。基于这一定义,本文采用完成某一工序任务的次数H来衡量操作者的经验。类似地,经验因素的量化方法为
(12)
式中:HM为完成产品制造任务的最大次数,即使操作者生产更多同类型产品,也不会对其经验的提升带来有效的帮助。同样,0≤ρe≤1.
2.1.3 任务复杂度
任务的复杂度是影响操作者表现的重要外部因素。在多工序制造系统中,每一阶段的操作者都需要做出多种选择行为,包括工具的选择、制造产品类型的选择、操作方法的选择等。因此,本文将从选择多样性的角度对任务的复杂度进行评价。
假设操作者在某一工序的制造任务中会发生k种选择行为,而每种选择行为都具有若干个可选项。可以获得以下概率矩阵:
(13)
式中:pij为第i个选择行为中第j个选项发生的概率;mk为可选项的个数。
某一选择行为的任务复杂度可以用信息熵Ec加以度量。信息熵是信息论中用于度量信息量的指标,一个系统越是简单有序,信息熵就越低;反之,一个系统越是复杂混乱,信息熵就越高。其表达式为
(14)
当任务中发生多个选择行为时,其任务复杂度是多个信息熵之和,如(15)式所示:
(15)
类似地,可以获得任务复杂度的量化公式为
(16)
式中:CM为任务复杂度熵的最大值,这一值对应着一种情况,即操作者需要做出所有潜在的选择行为,且每一个选项被选取的概率都相同。同样,0≤ρc≤1.
上述3个KCC的量化指标代入(9)式,可以获得操作者能力指数为
O(ρ)=1-e-ρt-ρe-ρc,
(17)
这一指数将作为重要的KCC,用于质量模型的构建。
2.2 制造设备因素
多工序制造系统中可能用到的设备多种多样。现有针对制造设备的研究大都针对某一类设备,其方法不具备通用性,如数控机床可靠性的研究。在多工序制造系统中,操作者会针对当前工序产品的制造合格与否对设备进行调整,因此同一台设备在t时刻的状态与其在t-1时刻的状态具有一定的相关性。同时,在一段时间内,同一台设备制造产品的合格率是一个稳定的数值[14]。这些统计学特点使得可以借助马尔可夫模型对设备的状态进行刻画。一个典型的马尔可夫转移模型如图3所示,假设完成某一工序任务所用到的制造设备处于合格状态g,在下一时刻它的状态变为不合格状态d的转移概率为λ,因此它在下一时刻保持状态g的概率为1-λ. 同样,如果某一制造设备处于不合格状态d,在下一时刻它的状态变为合格状态g的转移概率为μ,在下一时刻保持状态d的概率为1-μ.

图3 马尔可夫转移模型Fig.3 Transition probability based on Markov chain
令P(g,t)和P(d,t)分别表示设备在t时刻处于状态g和状态d的概率。由贝叶斯公式,t+1时刻的设备合格概率为
P(g,t+1)=P(g,t+1|g,t)P(g,t)+
P(g,t+1|d,t)P(d,t)=
(1-λ)P(g,t)+μP(d,t).
(18)
一段时间内设备的合格或不合格概率是一个稳定的数值,分别用P(g)和P(d)表示,有(19)式和(20)式成立:

(19)

(20)
将(19)式和(20)式代入(18)式,可得
(21)
由于P(g)+P(d)=1,因此可得制造设备的合格率为
(22)
EQ可以作为制造设备状态指数,用于KCC与KPC之间映射关系的构建。
3 映射关系的求解
如引言所述,随着制造过程复杂度的不断提高,映射关系F的解析表达很难求得。根据多工序制造系统的特点,本文应用近些年被证实更适用于小样本训练数据的支持向量机(SVM)构建代理模型。在映射关系F(s,q)中,s和q在SVM算法中并无区别,因此将其简化表示为F(x),其中x为由多个KCC组成的集合,x=(x1,x2,…,xn)。由于任意曲线在局部均可以表达为线性函数,因此F(x)可以用一般线性函数表示:
F(x)=ω·φ(x)+b,
(23)
式中:φ(x)为将x映射到高维空间的映射函数;ω和b为模型系数,SVM模型的构建过程就是通过数据对ω和b进行优化求解的过程。
为更加直观,在二维空间中阐释SVM的训练过程。根据结构风险最优化准则[15],F(x)应使ω最小。同时,误差小于不敏感系数ε是SVM模型构建的边界条件,这就得到以下非线性优化问题:
(24)

(25)
式中:m为支持向量点的数量。
(26)
这样便通过求解优化问题,获得了ω和b,则完整的SVM模型为

(27)
4 质量波动的主要影响源

(28)

(29)
借助(29)式,可找到KPC波动的主要影响源,从而为制造质量的控制提供指导。
5 实例验证
装配往往是产品制造过程的最后一环,装配过程的稳定性对最终的产品制造质量具有决定性的作用。本节将以某型号导弹涡轮发动机转子系统的装配过程为例,对本文所提出的方法进行验证。
5.1 转子装配过程描述
某型号导弹涡轮发动机转子系统如图4所示,其主要的组成部分包括轴流轮、斜流轮、涡轮盘、涡轮轴和轴端压紧螺母共5个部分。

图4 某涡轮发动机转子系统结构Fig.4 Structure of a turbine engine rotor system
转子系统的关键质量特性包括两个,即转子系统的不平衡量和转子轴端螺纹的预紧力。较大的不平衡量会导致发动机的振动加大,从而降低发动机的推力和零部件寿命。过大的预紧力使得螺母材料的蠕变过程加快,从而导致螺纹的断裂。过小的预紧力会在发动机振动的情况下直接导致螺母的松脱,进而造成发动机爆炸。
在工厂中,转子的装配是在3个车间中完成的,分别是零件动平衡车间、组件动平衡车间和发动机总装车间。在零件动平衡车间,操作者借助动平衡机,对4个回转零件逐一进行不平衡量的测量及修正,尽量降低零件的不平衡量,保证零件质量。在组件动平衡车间,操作者同样借助动平衡机对整个转子系统进行不平衡量修正。同时,由于转子系统需要配合静子系统完成发动机的总装,因此在修正结束后,需要将修正的组件进行拆卸并作安装标记,以便静子系统的加入。在发动机总装车间,操作者依据标记好的安装角度,最终完成转子系统的总装。
转子系统的装配过程及每一工序的KCC输入和KPC输出如图5所示。图5中:O1、O2、O3分别为3个车间中的操作者因素;EQ1、EQ2分别为车间1和车间2中动平衡机状态因素;BS1、BS2分别为车间1和车间2的动平衡机转速;PT为车间3中轴端螺母拧紧力矩;U1、U2、U3分别为零件初始不平衡量、车间2的输入不平衡量、车间3的输入不平衡量;PF和Us分别为转子装配完成后的轴端螺纹预紧力和系统不平衡量。

图5 转子系统装配过程Fig.5 Assembling process of rotor system
5.2 KCC与KPC的统计与量化
在某发动机制造公司中对某一型号发动机转子系统的装配过程进行了跟踪,结合历史装配数据和第2节中介绍的方法,对图5中的每一个变量进行了统计和量化:
1)操作者。在5.1节所述的3个车间中,每个车间拥有10名装配工人。借助最近的历史数据及(11)式和(12)式,获得了思考时间和经验因素的量化值。对于任务复杂度,3个车间中的工人在完成任务时需要作出的选择只有一项,即所装配产品的类型。在翻阅历史数据后,获得了每一车间装配产品的类型及其概率,依据(16)式,获得了任务复杂度的量化值。最后借助(17)式,得到了3个车间中每一名工人的操作者能力指数。
2)动平衡机。车间1和车间2分别拥有5台动平衡机,分别统计了每一台动平衡机连续修正的100个零件或组件中,合格品与不合格品的数量及顺序,计算获得了转移概率μ和λ,依据(22)式,计算获得了每一台动平衡机的状态指数。
3)平衡转速。发动机在实际工作时,转子的转速高达每分钟5~10万转。现有的动平衡机无法模拟这么高的转速,因此转子的不平衡修正是在较低的转速下完成的,这一转速称作平衡转速。平衡转速可在动平衡机的控制面板上实时读取。虽然平衡转速一般设置为整数(如本例的1 200 r/min),但由于平衡机的误差,平衡转速会有小幅波动。
4) 拧紧力矩。轴端螺母是通过测力矩扳手拧紧的,每次拧紧的力矩值可直接读取并记录。
5) 不平衡量。不平衡量可在动平衡机的控制面板上读取。
6) 预紧力。预紧力并不能直接测量。车间3在完成发动机的总装后,操作者需要借助激光测距仪测量涡轮轴的伸长量,间接计算得到预紧力。
通过查阅历史数据,获得了该型号发动机转子系统最近1 000条装配过程数据,这1 000台发动机相当于该制造公司在繁忙时期一周的产量。由于数据采集的时间间隔较短,因此认为操作者的能力和设备的状态没有发生改变,操作者能力指数和设备状态指数为常数。
5.3 映射关系的构建
利用KPC的均值和方差,工艺人员可以依据装配精度的要求计算产品制造质量的合格率。因此,准确预测KPC的分布参数,对制造合格率的准确计算具有重要的意义。
借助上述历史数据在数值分析软件MATLAB环境下对SVM进行训练。使用50条全新的转子装配数据用于SVM的验证。转子系统不平衡量的预测误差图如图6(a)所示,轴端螺纹预紧力的预测误差图如图6(b)所示。
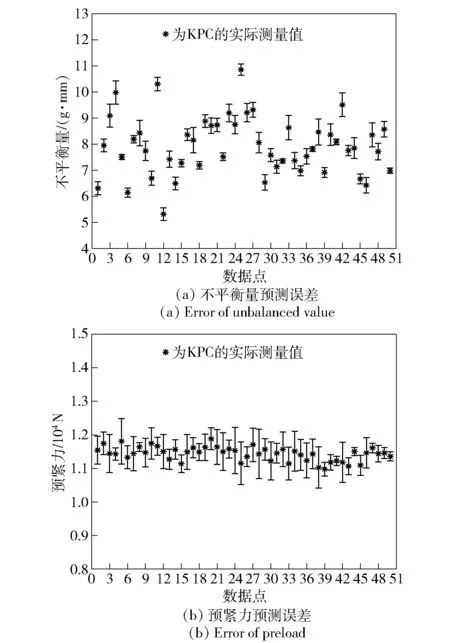
图6 不平衡量及预紧力误差Fig.6 Predicted errors of unbalanced value and preload
图6清晰地显示了上述模型的预测能力。50个数据点中,预紧力误差最大的点为数据点28,预测值和测量值相差6.44%,预紧力误差最小的点为点44,误差仅为1.05%. 不平衡量误差最大的点为点38,预测值和测量值相差5.98%,不平衡量误差最小的点为数据点5,误差仅为1.98%.
在工厂环境下,不平衡量的一般装配精度要求为不超过10 g·mm,预紧力的一般精度要求为11 000~12 250 N. 依据这一精度要求统计误判点,即KPC的实测值达到了(或未达到)装配精度的要求,而QTCM的预测值却显示未达到(或达到)的点。上述50个预测点中,不平衡量出现误判的点只有1个,误判率仅为2%,预紧力出现误判的点有2个,误判率仅为4%.
如果像大多数的质量分析过程一样,忽略掉操作者和制造设备的影响,只采用原始不平衡量、平衡转速等因素作为模型的输入,采用和图6同样的训练步骤,训练后的预测误差如图7(a)和图7(b)所示。为了将误差条显示完整,缩小了纵轴的比例。显然,相比图6而言,图7的误差要大很多,最大的误差甚至达到了50%. 这证明了考虑操作者能力和制造设备状态的必要性。
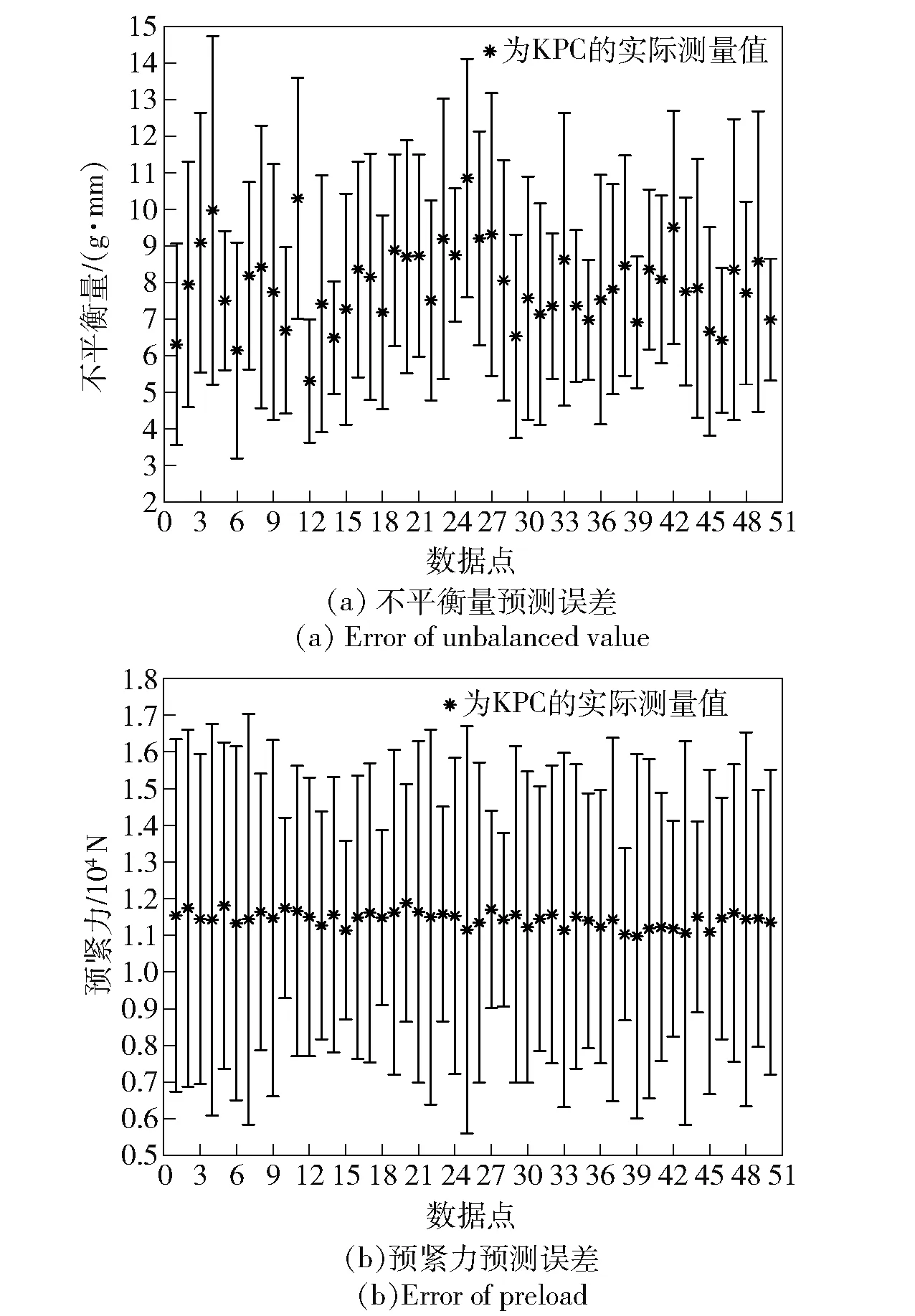
图7 忽略操作者和设备影响后的预测误差Fig.7 Predicted error after ignoring operator and equipment
5.4 质量变化预测
KPC的波动程度是衡量多工序制造系统的重要指标,因此只验证QTCM的均值预测能力是不够的,还需要考察QTCM的KPC波动预测精度。根据(7)式,同样借助上述50组验证数据,不平衡量和预紧力标准差的预测值与测量值如表1所示。预测值和测量值十分接近,这验证了QTCM的波动预测能力。
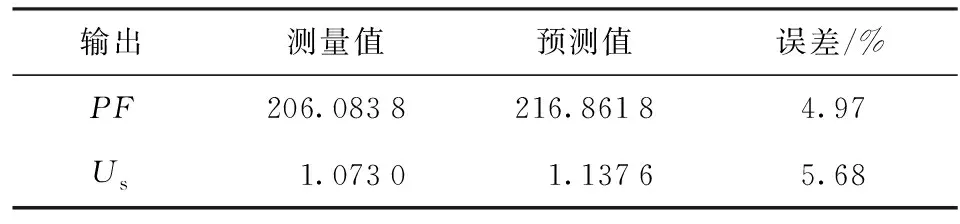
表1 输出变量标准差的预测值与测量值
5.5 主要误差源的求解
依据(28)式和(29)式,可得每一个KCC对每一个KPC波动的贡献量,如表2所示。
由表2可以发现,车间3中操作者的能力是转子系统不平衡量波动的主要来源,因此如果想要降低转子系统不平衡量的波动,就需要在车间3中安排经验最丰富、能力最强的操作者。同时,车间2中的操作者、拧紧力矩和零件原始不平衡量的波动也是转子系统不平衡量波动的重要来源,它们的贡献均超过了10%,因此这些因素的波动也需严格控制。拧紧力矩波动是螺纹预紧力波动的主要来源,它的贡献量几乎达到了90%,因此严格控制拧紧力矩是降低螺纹预紧力波动的最佳措施。

表2 KCC对KPC波动的贡献量
6 结论
为了对多工序制造系统中质量的传递过程进行客观、全面地表达和分析,本文提出了质量传递综合模型,并对QTCM的建立过程进行了详细地描述。得出主要结论如下:
1) QTCM可以对多工序制造系统进行合理地表达,并借助输入变量的分布情况对KPC的分布做出准确的预测。QTCM框架是分析多工序制造系统的理论基础,多种研究工作(不限于本文,包括工艺设计、故障诊断、过程控制等)均可以基于这一框架展开。
2) 操作者能力和设备状态的考虑使得QTCM更加完整和准确。
3) SVM用于多工序制造过程中KCC和KPC之间映射关系的构建,具有良好的预测表现。
4) 提出的主要波动源识别方法可以为制造质量的提高提供帮助,计算获得的质量波动主要影响源与工厂的经验判断一致。
