欠驱动水面无人艇鲁棒自适应位置跟踪控制
2020-08-14张成举王聪王金强李聪慧
张成举, 王聪, 王金强, 李聪慧
(哈尔滨工业大学 航天学院, 黑龙江 哈尔滨 150001)
0 引言
欠驱动水面无人艇(USV)是当前应用较多的海洋工程设备,可进行海洋巡逻、海洋探测等。欠驱动USV位置跟踪在海洋工程中具有较多的运用,例如敌方舰艇追踪等。恒定海流的干扰、参数不确定等给欠驱动USV运动控制带来了困难。
为解决以上问题,Xie等[1]采用级联控制对欠驱动USV系统轨迹跟踪进行研究,通过仿真实验验证了该控制系统的有效性,但级联系统较为复杂,工程应用较为困难;王岩等[2]运用滑模控制方法对欠驱动USV实现了路径跟踪;王金强等[3]考虑未知海流和水动力学系数不确定的影响,采用自适应方法对未知水动力系数进行补偿,通过仿真实验验证了该控制系统的稳定性,然而,并未将模型参数不确定考虑在系统中;周佳加等[4]提出一种针对AUV位置跟踪的改进自适应神经网络控制器,通过仿真实验验证了该控制器的有效性,但是忽略了海流的干扰;王宏建等[5]运用滤波反步法实现了AUV的路径跟踪控制器设计,通过仿真实验验证了控制器的稳定性,但是并未考虑参数不确定性;Dong等[6]通过运用改进后的反步方法对USV系统进行轨迹跟踪,效果显著;Sonnenburg等[7]通过将级联控制轨迹跟踪控制器与反步法非线性轨迹跟踪控制器进行实验对比,实验结果表明,基于反步法的非线性控制器比级联控制器更有效;Wang等[8]提出一种神经网络自适应滤波反步法,设计了欠驱动AUV三维路径跟踪控制控制器,运用径向基函数(RBF)神经网络对系统不确定函数进行有效逼近,通过仿真实验验证了该控制器的有效性;张伟等[9]将AUV三维路径跟踪系统分解为运动学和动力学回路,设计了一种神经网络动态逆控制器,通过仿真实验验证了该控制器的有效性,但是忽略了海流的干扰;徐健等[10]设计了一种基于神经网络的动态逆控制器,通过仿真实验验证了该控制器的稳定性;Yipp[11]针对该问题,提出动态面控制算法,将反步法中虚拟控制变量输入1阶滤波器,滤波后的信号为实际控制输入,不需对虚拟控制变量逐级求导;Elmokadem等[12]针对欠驱动水下机器人提出采用滑模补偿外界干扰,取得了较好的跟踪效果,但是控制器是基于已知模型的,忽略了模型参数不易准确获得的难题。
综合以上国内外研究,虽然一些设计的控制器具有良好的控制性能,但同时考虑海流干扰与系统参数不确定性的相关文献较少。本文考虑USV系统参数不确定和恒定海流干扰,对位置跟踪问题开展研究。通过设计神经网络自适应控制器,对USV系统进行跟踪控制,并且运用仿真实验验证该控制器的有效性。
1 USV控制问题描述
1.1 神经网络简述
RBF神经网络能在一个紧凑集和任意精度下逼近任何非线性函数;本文运用RBF神经网络逼近未知函数,RBF神经网络算法为
(1)
f=ω*Th(x)+ε,
(2)
式中:j为神经网络隐含层第j个节点;x为神经网络输入;cj为网络中心向量;bj为宽度;ω*为神经网络的理想权值;h(x)为高斯函数;ε为神经网络的逼近误差,且ε≤ε0,ε0为正实数。
RBF神经网络的输出为
=ωTh(x),
(3)
1.2 USV动力学模型
对于欠驱动USV,设定惯性坐标系为OEXEYE,体坐标系为OBXBYB;对于USV而言,本文只研究水平面内运动控制问题,USV位姿及速度可表示为{x,y,ψ}和{u,v,r},x、y和ψ分别为USV在惯性坐标系下的水平面横坐标、纵坐标和偏航角,u、v和r分别为USV在体坐标系下的纵向速度、横向速度和偏转角速度。USV位置跟踪如图1所示,期望运动轨迹为ηh(t),期望位置为xd、yd,运动轨迹误差为{xe,ye,ψe},xe、ye、ψe分别为惯性坐标系下的位置和偏航角跟踪误差。

图1 USV水平面轨迹跟踪Fig.1 USV trajectory tracking on horizontal plane
欠驱动USV运动特性,选取简化后的USV水平面运动数学方程[13]为
(4)
式中:vcx、vcy分别为USV在惯性坐标系下的海流速度。
USV动力学方程为
(5)

由于欠驱动USV系统横向没有控制输入,本文假设横向速度v有界,所以后文不对横向速度误差进行镇定。
1.3 船体坐标系下位置跟踪误差方程
定义USV在惯性坐标系下的期望位置和偏航角为xd、yd和ψd,体坐标系下的期望速度为uc、rc,则可定义USV在惯性坐标系下的位置及偏航角跟踪误差为
xe=xd-x,ye=yd-y,ψe=ψd-ψ,
(6)
可得体坐标系下的位置和姿态跟踪误差为
(7)
根据(7)式可知,若ex和ey均为0,则xe和ye也为0,反之亦然;本文设计的控制器目的是使ex和ey趋于0附近一个任意小的邻域中。
对ex和ey分别求导,可得
(8)

2 USV位置跟踪控制器设计
2.1 镇定ex和ey
对于USV系统位置跟踪误差而言,建立一个李雅普诺夫函数:
(9)
对(9)式求导,可得

(10)
定义一个新的变量:
q=vmsinψe,
(11)
(12)
式中:λ1、λ2为控制器参数,λ1>0,λ2>0;cx、cy为海流观测器观测速度。
(12)式代入(10)式,可得
(13)

虚拟控制变量uc和qc通过1阶滤波器,可得
(14)
式中:ucf和qcf为经过滤波器滤波后的虚拟控制变量;λu、λq为控制器参数,λu>0,λq>0.
2.2 镇定eu
定义USV系统的速度误差变量为
eu=u-ucf,eq=q-qcf,
(15)
(15)式代入(13)式,可得
(16)
定义一个新的李雅普诺夫函数为
(17)
对(17)式求导,可得
(18)
为保证控制系统稳定性,可设定控制输入τu为
(19)
式中:λ3、η1为控制器参数,λ3>0,η1>0;1为神经网络权值的估计值,并且神经网络权值估计误差
选取自适应律为
(20)
式中:k1、σ1为控制器参数,k1>0,δ1>0.
根据(19)式,可得

(21)
式中:κu=m22vr-Xuu-Xu|u|u|u|.
(21)式代入(18)式,可得
(22)
2.3 镇定eq
为稳定欠驱动USV系统偏航角,定义一个新的李雅普诺夫函数:
(23)
对(23)式求导,可得
(24)
可设定r的期望值为
(25)
式中:λ4为控制器参数,λ4>0.
(25)式代入(24)式,可得
(26)
虚拟控制变量rc通过1阶滤波器,得
(27)
式中:rcf为虚拟控制变量rc经过滤波器的滤波值;λr为控制器参数,λr>0.
2.4 镇定er
根据(27)式可知,rc是理想虚拟控制量。定义误差变量
er=r-rcf,
(28)
另外定义一个新的李雅普诺夫函数:
(29)
对(29)式求导,可得
(30)
选择控制输入τr为

(31)
式中:λ5、η3为控制器参数,λ5>0,η3>0;3为神经网络权值的估计值,并且神经网络权值估计误差
选取神经网络自适应律为
(32)
式中:k3、σ3为控制器参数,k3>0,δ3>0.
(31)式代入(5)式,可得

(33)
式中:κr=(m11-m22)uv-m33fr(r)-Nrr-Nr|r|r|r|.
(33)式代入(30)式,可得
(34)
2.5 镇定和
定义一个新的李雅普诺夫函数
(35)
对(35)式求导,可得
(36)
(21)式和(32)式代入(36)式,可得
(37)
根据文献[8},可得
(38)
(38)式代入(37)式,可得
(39)
根据文献[13],可得
(40)

2.6 观测器设计
为估计恒定海流速度vcx和vcy,采用反步法设计一种自适应海流观测器[15]。
定义位置x和y的估计值为和,则有
(41)
式中:r11、r21为控制器参数,r11>0,r21>0;εx和εy为位置x和y的估计误差,则
(42)
对(42)式求导,可得
(43)
选取海流速度估计误差导数为
(44)
式中:r12、r22为控制器参数,r12>0,r22>0.
定义一个李雅普诺夫函数为
(45)
对(45)式求导,可得
(46)
3 稳定性分析
考虑所设计的位置跟踪控制器与海流观测器所组成的闭环系统,通过将系统分解为两个子系统Σ1和Σ2.
定义子系统Σ1为
‖x1‖=[exeyeueqer]T.
(47)
由于1阶滤波器滤波前后存在误差,为确保系统稳定性,对滤波误差进行镇定。定义1阶滤波器对虚拟控制变量滤波后与滤波前的差值为
(48)
对方程组(48)式进行求导,可得
(49)
式中:λz为控制器参数,λz>0.
由3个虚拟控制量式,可得
|dzc/dt|≤ζz,z=u,q,r,
(50)
式中:ζz为闭环信号连续特性。
根据文献[14],可得

(51)
定义一个新的李雅普诺夫函数:
(52)
对(52)式求导,可得
(53)
通过选取合适的控制器参数λ1、λ2、λ3、λ4、λ5、η1、η3、δ1、δ3、λu、λq、λr,可保证子系统Σ1全局一致稳定。

(54)
对(54)式求导,可得
(55)
(44)式代入(55)式,可得
(56)
则子系统Σ2是全局一致稳定的。
建立一个新的李雅普诺夫函数为
V=V6+E2.
(57)
对(57)式求导可得
(58)

(58)式可变换为

(59)

(59)式可转化为
(60)
综上所述,闭环系统内所有误差信号一致有界,所以本文所设计的控制器是稳定的。
4 仿真分析
本文选取文献[16]欠驱动USV系统模型,验证设计的控制算法。该USV模型参数为m11=25.8 kg,m22=33.8 kg,m33=2.76 kg·m2,Xu=12 kg/s,Yv=17 kg/s,Nr=0.5 kg·m2/s,Xu|u|=2.5 kg/m,Yv|v|=17 kg/s,Nr|r|=0.1 kg·m2.
选取欠驱动USV初始条件为x(0)=-10 m,y(0)=5 m,u(0)=0.3 m/s,v(0)=0 m/s,ψ(0)=0 rad,r(0)=0 rad/s.
欠驱动USV应用过程中,τu、τr是有限的,在控制器设计中,设定控制输入为有限值:0<τu<90 N,0<|τr|<20 N·m.

在保证无人艇正常行驶的条件下,经过多次仿真实验,恒定海流干扰范围为-0.4 m/s≤vc≤0.4 m/s. 随机选取恒定海流选取为vcx=-0.2 m/s,vcy=-0.2 m/s. 为验证该控制器控制性能,选取预期轨迹为xd=0.6t,yd=60sin(0.01t)。
为便于仿真结果分析,仿真时间为1 000 s,可清晰地看出运动轨迹,与文献[16]中反步法进行对比,仿真结果如图2~图7所示。为更好地呈现仿真结果,由于控制器稳定后结果呈现周期性,图4~图7展现了前200 s的仿真结果。

图2 预期轨迹与实际运动轨迹Fig.2 Desired trajectory and practical trajectory

图3 位置跟踪误差Fig.3 Position tracking errors

图4 速度跟踪误差Fig.4 Velocity tracking errors

图5 函数逼近误差Fig.5 Function approximation errors

图6 海流速度观测误差Fig.6 Observed errors of current velocity
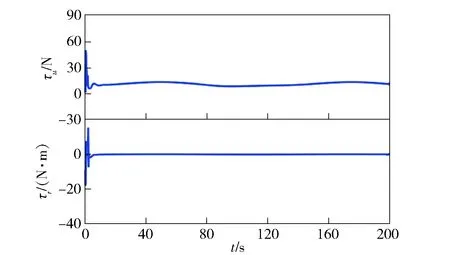
图7 控制力与控制力矩Fig.7 Control force and control moment
根据图2可知,提出的控制算法可有效实现预期轨迹跟踪。根据图3和图4可知,欠驱动USV位置跟踪误差、速度跟踪误差均收敛到0附近的一个邻域内。根据图5可知,提出的神经网络自适应算法可有效逼近未知函数。根据图6可知,海流观测器对海流速度的观测效果较为理想。根据图7可知,欠驱动USV控制力及控制力矩在设定范围内,并且较为稳定。
5 结论
本文针对欠驱动USV在恒定海流干扰下的水平面位置跟踪问题,提出了神经网络自适应控制策略。得出以下主要结论:
1) 采用神经网络可对未知函数有效估计和补偿。
2) 通过运用李雅普诺夫理论证明了该控制系统的稳定性。
3) 通过仿真结果表明,欠驱动USV位置跟踪间隙误差、偏航误差、速度跟踪误差均收敛到0附近的一个邻域内,从而验证了该控制算法的有效性。
