回转体低速串联入水空泡及运动特性试验研究
2020-08-14余德磊曹伟魏英杰
余德磊, 曹伟, 魏英杰
(哈尔滨工业大学 航天学院, 黑龙江 哈尔滨 150001)
0 引言
入水过程是超空泡射弹等入水攻击武器从空中弹道进入水下弹道的重要过渡环节[1]。入水过程具有很强的瞬时性与非定常性,其中的入水撞击与入水空泡会对运动体的结构强度和弹道稳定性产生重要影响,因此入水问题引起国内外学者的广泛关注。
19世纪末Worthington等[2]采用当时的闪光技术记录球体入水过程,研究入水喷溅及入水空泡现象。Bell[3]和Maccoll[4]基于入水空泡试验结果,初步总结了空泡生成、演化过程的流动特征与形成机理。Backer等[5]开展了不同锥角的圆锥体垂直入水问题试验及理论分析研究。文献[6-8]针对细长体的入水问题开展试验研究,分析了细长体头型等因素对入水空泡生成和发展的影响规律。路中磊等[9]针对开放空腔圆柱壳体开展入水试验研究,发现了开放空腔壳体入水运动的波动流动和云化流动现象。杨衡等[10]开展不同头型射弹入水的定性试验研究,研究了入水速度、入水角度和射弹头型对入水空泡形态和弹道特性的影响。何春涛等[11]开展圆柱体垂直入水空泡形态试验,分析了不同速度和角度对入水空泡形态的影响。李佳川等[12]开展针对加热球体的入水空泡试验研究,探讨了不同球温和水温下低速入水空泡特性。宋武超等[13]针对不同头型回转体开展倾斜入水过程流场特性数值研究,得到了不同头型回转体的入水空泡形态发展规律、运动特性及流体动力特性变化规律。李达钦等[14]开展不同密度比球体入水空泡流体动力特性研究,得到了球体带空泡航行阶段的时均流体动力系数随着密度比的增加而减小的变化规律。黄超等[15]针对超疏水小球开展低速入水空泡研究,得到了小球漂浮振荡、准静态空泡、浅闭合空泡、深闭合空泡和表面闭合空泡5种类型的动力学行为。陈晨等[16]开展小型运动体高速倾斜入水空泡流动的数值研究,结果表明入水角度越小,撞击阶段阻力系数与碰击压力越小,入水后越容易发生弹道偏移,同时拉脱现象发生得越晚,入水空泡的最大尺寸越大。侯宇等[17]利用高速摄像技术开展超空泡射弹入水试验,研究超空泡射弹小入水角高速斜入水性能,结果表明,弹体小侧滑角入水能形成较光滑透明的入水空泡和稳定的入水弹道,较大的侧滑角下弹体的损坏程度随着侧滑角增大而增大。
目前国内外的研究主要针对单个运动体入水,而在实际应用的机载灭雷系统[18]中通过向水中连续发射超空泡射弹进行灭雷,该过程中涉及到多个射弹不同间距下的串联入水。关于串联入水的研究较少,何春涛等[19]进行了串列回转体的入水研究,初步探讨了关联航行体的新流动现象及相互之间的影响,获得了串列运动的3种失稳方式,但是其仅基于3个入水间距情况进行定性分析,尚未进行系统研究。
本文通过试验研究方法,基于高速摄像及时序释放装置进行不同入水初始间距的回转体串联入水研究,通过定量与定性分析,得到入水初始间距对回转体串联入水空泡演化、纵向位移与偏转角的影响规律,并分析新的流动现象形成机理。
1 试验系统与模型参数
本文试验系统主要由试验水池、光学测试系统和释放机构3部分组成,如图1所示。试验水池为尺寸300 mm×300 mm×900 mm的小型水槽。试验光源采用发光二极管(LED)点阵光源作为背景光,并用柔光屏对背景光进行柔化,并且采用1盏LED灯作为顶光,用于增强回转体边界清晰度,便于图片数据的后期处理。本文试验采用 日本Photron公司生产的FASTCAM SA-X型高速摄像机摄录,采集帧率为2 000帧/s,并通过自编程序提取运动信息。

图1 试验系统示意图Fig.1 Schematic diagram of test system
释放机构由推拉式电磁铁和竖直导轨组成,如图2所示。回转体沿竖直导轨运动,以达到竖直入水的效果;推拉式电磁铁通过触发开关控制,利用Arduino集成开发环境编写时序控制程序,可控制两回转体释放时序;将电磁铁和试验支架分离安装,以消除电磁铁释放时造成的振动影响。
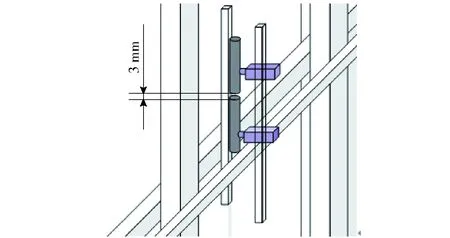
图2 释放机构示意图Fig.2 Schematic diagram of release mechanism
在回转体串联入水试验中,两发运动体通过同一个竖直导轨在固定位置自由释放,每次试验后利用铅锤进行校正。为保证入水速度差异较小且易于观测,在释放时两发运动体间距3 mm.
试验模型如图3所示。模型直径D=10 mm,长Lm=40 mm,质心位置Lg=20 mm. 模型用7075铝合金加工,密度为2.8 g/cm3.

图3 入水试验模型Fig.3 Water entry test model
2 试验结果与分析
2.1 典型回转体串联入水过程
基于本文的试验装置与模型进行回转体串联入水试验,研究入水初始间距对入水空泡与运动的影响。表1为回转体串联入水试验的初始条件。表1中:vf0和vs0分别为首发和次发运动体单独入水时的入水初速度;d为首发运动体入水瞬间两运动体之间的距离,即为入水初始间距。

表1 回转体串联入水试验初始条件
图4给出了入水初始间距d=0.46D时回转体的串联入水过程。从图4中可以看出,两运动体在入水初期出现碰撞,对各自的空泡演化产生强烈扰动:同单独入水过程相比,首发运动体无尾空泡结构产生,其原因是次发与之贴合,破坏了尾空腔于首发尾部附近的演化。当次发与首发分离时,首发的速度产生波动,因此其头部的空泡径向尺寸略微减小,如t=53 ms时入水照片所示。当两运动体完全分离,二者之间出现受限的流体层区域,该耦合区域流场特征不同于首发单独入水时尾流场特征,因此将对首发运动产生一定影响。对于次发运动体,由于其与首发碰撞后贴合运动,因此其头部无空泡产生。在接下来的运动过程中,尾空腔结构沿着其表面运动,经过尾部时产生气体通道,闭合后形成尾空泡结构。
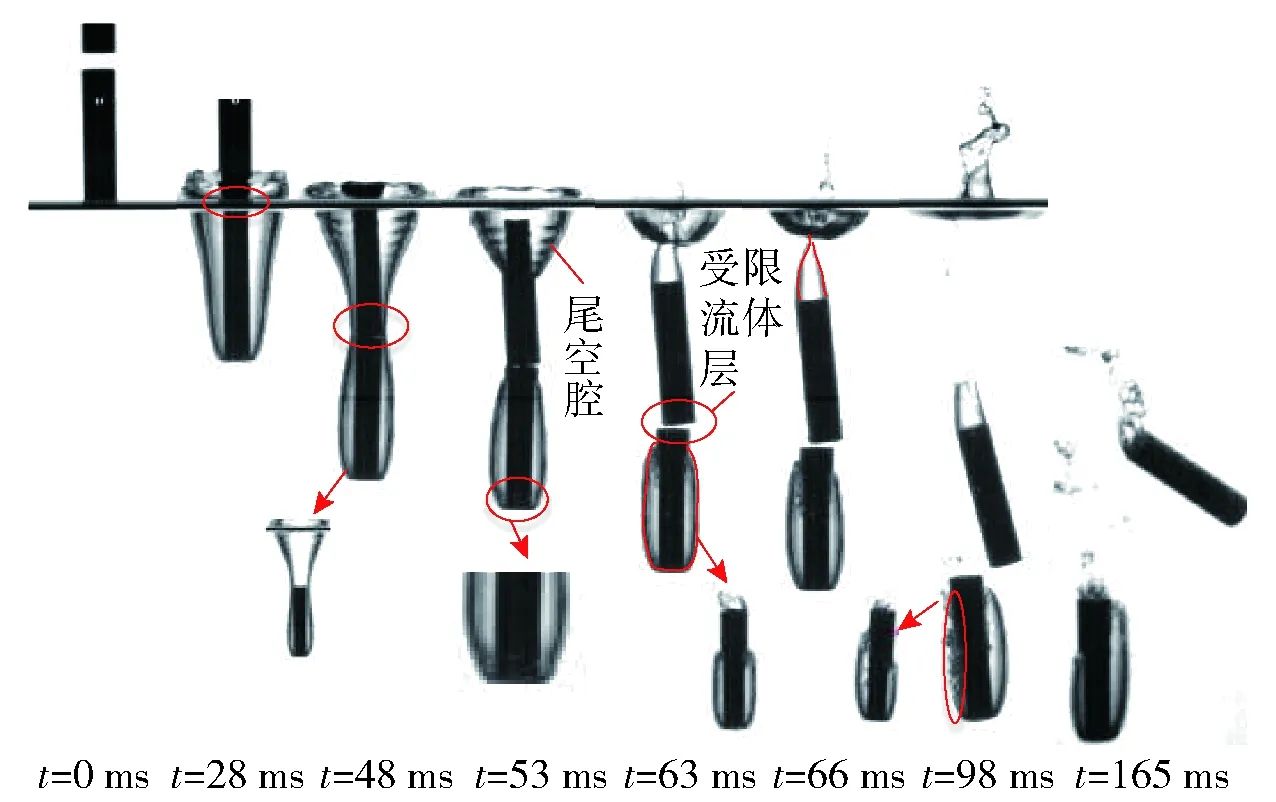
图4 强扰动下回转体串联入水过程Fig.4 Tandem water entry process of rotary bodies under strong disturburbance
图5给出了入水初始间距d=2.29D时的回转体串联入水过程,与图4相比,两运动体的空泡演化受到的影响减弱。入水初期,首发运动体的空泡演化未受影响,次发运动体靠近过程中,首发的尾空泡结构将经历失稳后完全溃灭。图5中展示了此入水间距附近工况的次发入水时刻流场状态,可以看到两运动体之间将产生封闭空腔结构,随着入水初始间距增大,首发的空泡演化将不受影响。对于次发运动体,其入水后仍无入水空泡生成,其原因是入水时刻头部下方存在部分空腔,入水撞击过程不明显,并且首发的尾空腔迅速闭合于次发表面,封闭了与空气连通的通道。

图5 过渡扰动下回转体串联入水过程Fig.5 Tandem water entry process of rotary bodies under transition disturbance
图6给出了入水初始间距d=5.50D时回转体的串联入水过程。此时首发的空泡演化不再受到次发影响,但是次发的空泡仍受到首发造成的液面扰动与脱落空泡扰动。在液面扰动下,次发的入水空泡形态与单独入水时存在较大区别:入水喷溅呈现不规则分布,如t=78.5 ms时入水照片所示,其原因可能是由于首发向上的射流未能与次发顶面发生较好的正面碰撞,如t=57 ms时入水照片所示;开空腔过程中空泡的最大径向尺寸在自由液面下方,如t=98.5 ms时入水照片所示。在脱落空泡扰动下,次发的随体空泡较早发生失稳和溃灭现象。

图6 弱扰动下回转体串联入水过程Fig.6 Tandem water entry process of rotary bodies under weak disturbance
为研究典型回转体串联入水过程中的运动特性,定义如图7所示坐标系。坐标原点定义在射弹撞击自由液面处,水平方向为x轴,竖直方向为y轴,取平面内回转体轴线与重力方向的夹角θ为偏转角,顺时针偏转为正。在定义坐标系下运动体质心坐标为(xc,yc)。

图7 弹体运动坐标系Fig.7 Mioving coordinate system of projectile
图8为本文的数据处理方法。本文采用区域分割思想,同时引入Hough函数[20]与Ginput函数提取运动体的弹道信息。处理过程可参考文献[20]。由于串联入水过程中流场扰动更加复杂,需要对个别图片进行人工提取,即通过手动确定运动体轮廓上的两点,进而得到轮廓直线,得到轮廓直线后通过坐标变换得到运动体某时刻对应的位移及姿态。

图8 数据处理方法示意图Fig.8 Schematic diagram of data processing method
为分析数据处理方法的可靠性,对某时刻摄像图片进行数据处理(首发运动体通过Hough函数处理,次发运动体通过手动处理),得到对应的纵向位移及偏转角。每个参数均进行了5次测量,分析结果如表2所示。表2中yf和θf分别为首发运动体的纵向位移与偏转角,同理ys和θs表示次发运动体。其中误差分析主要包括标定误差、折射误差及人工操作误差,人工操作误差在进行人工提取时存在,本文取3个像素的操作误差。

表2 数据处理误差分析
图9给出了运动体接触水平液面时刻的偏转角(单独入水试验中首发偏转角0°,次发偏转角1.03°),可以发现两运动体的入水垂直性均较好,其中入水间距d/D为5.50和6.42时次发运动体入水垂直性较差。

图9 释放系统可靠性分析Fig.9 Release system reliability analysis

图10 典型工况中运动体的纵向位移变化Fig.10 Longitudinal displacement changes of rotary bodies under typical working conditions
图10为两运动体质心的纵向位移变化曲线,定义y/Lm=0处为回转体入水时质心位置。从图10中可以看出:首发运动体的纵向位移随着入水初始间距的增大,逐渐接近单独入水运动,说明了回转体串联入水过程中,首发纵向位移受到的影响随着入水初始间距的增大而减弱;次发运动体的曲线随入水初始间距变化较复杂,从局部放大图可以看到,运动末期d为0.46D和5.50D时曲线较单独入水小。分析其主要原因可能是碰撞减小了运动速度,液面喷溅扰动增大了运动体受到的阻力,从而位移较小。在d=2.29D时,尾空腔结构导致次发的入水撞击过程减弱,同单独入水相比速度衰减减小,因此位移较大。

图11 典型工况中运动体的偏转角变化Fig.11 Variation of deflection angle of rotary body under typical working conditions
图11为两运动体的偏转角变化。从图11中发现,不同入水初始间距下,两运动体的姿态特征均发生变化,并且次发运动体的姿态变化较首发大。结合运动过程分析曲线变化规律,当d=0.46D时首发运动体的姿态失稳趋势明显,并且碰撞会造成其运动率先失稳,首发运动体的两侧空泡呈不对称形状,其产生的顺时针力矩促进运动体发生顺时针偏转。由于运动体尾部后方的流场受到次发的流场扰动,其姿态继续发生偏转,并且在一段时间内失稳趋势持续增大。最后次发远离首发运动体,流场扰动现象减弱,因此首发运动体在恢复力矩作用下开始恢复竖直。另外,首发运动体在入水间距d=5.50D时姿态变化较大,可能原因是上次试验中首发运动体撞击底面后肩部受损。对于次发运动体,其偏转呈递增变化,其原因是次发运动体为全沾湿状态,无恢复力矩作用。在d=2.29D时,首发运动体受到次发运动影响,其尾空泡溃灭较早且形态复杂,造成其运动姿态与单独入水存在较大区别,进一步说明尾流场的扰动对首发运动具有重要影响。对于次发运动体,其头部附近流场受首发尾流场影响,可能受到不均匀的流体动作用力,产生姿态偏转。在d=5.50D时,首发运动体的纵向位移特征基本不受影响,说明了串联入水过程中首发运动体应存在临界时序。结合运动过程图像发现,首发的脱落空泡可能破坏次发空泡形态,对次发的运动稳定性造成影响。
根据试验结果发现,不同的入水初始间距将出现不同的特征扰动,此扰动将对运动体的空泡演化和运动特征产生重要影响。例如在d为0.30D~0.85D的串联入水试验中,在首发入水开空腔过程中出现了碰撞;在d为1.50D~2.29D试验中,首发尾空腔闭合前次发运动体入水,在运动体之间形成了一个封闭的空腔结构。基于此归纳了随入水初始间距增大依次出现的4种运动模式:碰撞扰动模式、封闭空腔扰动模式、过渡扰动模式、弱扰动模式。图12为4种不同运动模式的示意图。碰撞扰动模式中碰撞现象发生在开放空腔内部,空腔边界尚未与次发运动体接触;封闭空腔扰动模式中尾空腔直径满足δmin≤D,因此在首发尾部与次发头部之间形成一个封闭空腔;过渡扰动模式中,次发运动体入水时,首发尾空泡已经形成,次发入水时的液面封闭,头部产生的入水空泡随时序逐渐增大;弱扰动模式中首发运动体的空泡演化基本未受影响,而次发运动体受到液面扰动与首发脱落空泡影响。

图12 深闭合流场中串联入水运动模式示意图Fig.12 Schematic diagram of water entry mode in a deep closed flow field
2.2 不同入水初始间距下的空泡及运动变化规律
图13给出的是首发运动体入水后的3个典型时刻,入水初始间距对空泡尺寸的影响,L为串联入水时的空泡长度,L0为该时刻单独入水时的空泡长度。由图13可见:在相同时刻随着入水初始间距的增大,空泡的最大长度差异减小,其中t=85 ms对应曲线在d/D=3.00时仍然存在较小的差距,其主要原因是包括入水偏差影响及入水时刻增加,空泡的不稳定性增强;从t为30 ms和55 ms曲线中发现,曲线过渡到稳定状态所对应的横坐标逐渐增大,说明不同入水初始间距越小,首发运动体的空泡演化受到影响的时刻越早。
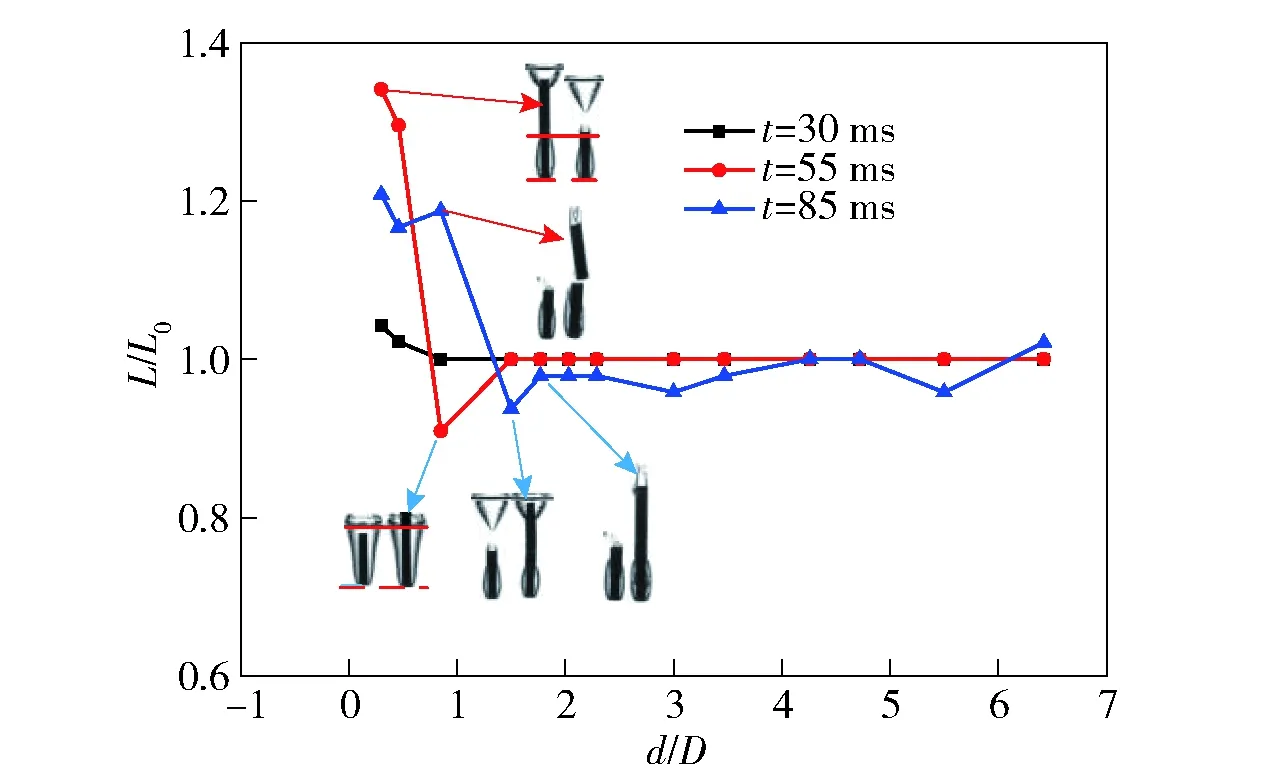
图13 不同入水初始间距下首发运动体空泡尺寸变化Fig.13 Dimensional changes of cavitation of the first round at different initial spacings
通过与单独入水时的空泡尺寸相比,串联入水时的空泡长度存在较大变化。结合运动过程,得到空泡尺寸增大(红色箭头标识)的原因:通过碰撞获得较大速度;空泡失稳加剧。尺寸减小(蓝色箭头标识)的原因:二次碰撞致随体空泡径向尺寸增大而纵向尺寸减小;两运动体的随动造成空泡失稳延缓。
图14给出了不同入水初始间距下次发运动体的尾空泡结构,可以看出,随着入水初始间距增大,次发的入水空泡存在转变现象:在d为0.30D~2.29D时次发无入水空泡生成,结合试验图像分析,其原因是次发入水无入水撞击过程,且尾空腔闭合于弹体封闭了空气通道;在d为3.00D~6.42D时,次发入水时液面封闭,存在入水撞击过程。但是由于液面存在径向速度,因此在d=3.00D时仍无入水空泡产生。随着液面流场发展,次发入水时的撞击现象变得剧烈,径向速度的影响相对较弱,因此入水空泡逐渐增大,在d=5.50D时产生深闭合型入水空泡。

图14 不同入水初始间距下次发运动体尾空泡结构Fig.14 Cavitation structures of the second round at different initial spacings
另外,以液面是否闭合为临界条件时可以发现,次发运动的尾空泡存在两种闭合方式:第1种出现于d为0.30D~2.29D时,此时尾空泡的闭合方式是尾空腔的V形闭合;第2种出现于d为3.00D~6.42D时,尾空泡的闭合方式是尾空腔的颈缩闭合。造成两种闭合方式的主要原因为次发是否存在入水撞击过程。
图15为两运动体在典型时刻,不同入水初始间距下回转体质心的纵向位移。图15(a)中虚线标识不同时刻下的临界入水间距,可以看到随着入水时刻的增加,影响首发运动体运动的时序范围越大。从图15中可以看到在次发影响下首发运动体位移均较单发运动体入水大,通过分析得知位移增大的主要原因是碰撞。另外,在t=145 ms时刻曲线发现在影响区随着时序增大,位移曲线先减小、后增大再减小,结合运动图像分析此现象的原因是在d为1.5D、1.77D时碰撞时刻较早,且持续时间长。
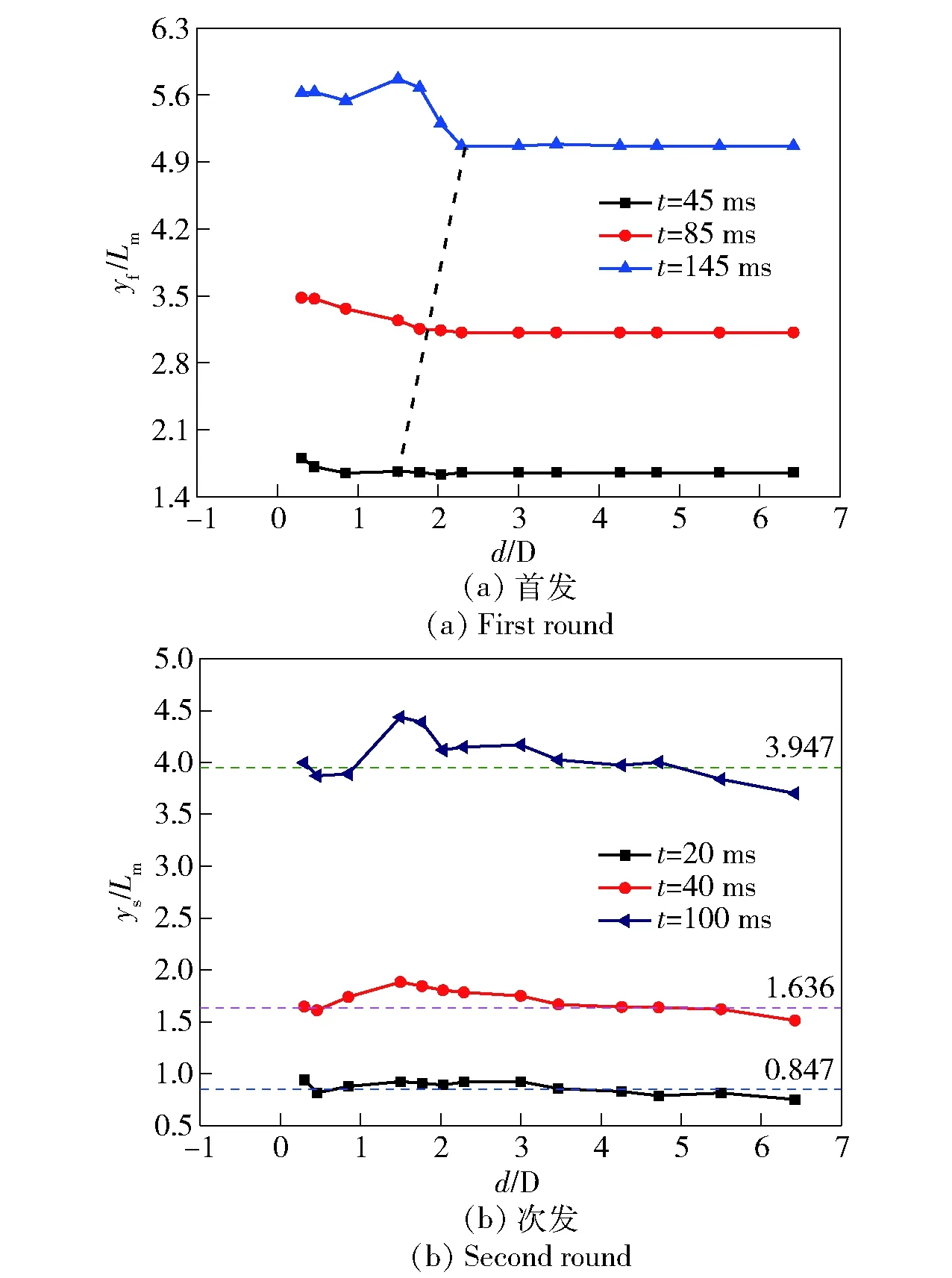
图15 不同入水初始间距下的纵向位移特性Fig.15 Longitudinal displacement characteristics of rotary bodies at different initial spacings
对于次发运动体,其纵向位移特性与首发存在较大区别。图15(b)中虚线为单独入水时该时刻的位移。综合影响次发的纵向位移因素,主要有碰撞和入水时的流场状态,其中较大入水初始间距时受液面扰动影响,其位移仍和单独入水存在差异。
为进一步研究两运动体的运动特性,定义无量纲数C为
(1)

对于首发运动体:当C>1时,说明运动体较单发运动体入水的稳定性差,C值越大越差;当C<1时说明运动体的稳定性较好,C越小说明稳定效果越好,Cmin=0. 图16为两运动体不同初始间距下的运动特性变化规律。由图16可以看出,串联入水运动过程中,随着入水初始间距增大,不同的运动模式中运动特征存在较大区别:在碰撞扰动模式中首发运动体的稳定性最差,其原因是该模式时运动体入水初期即出现碰撞现象,对其稳定性起直接的破坏作用;在封闭空腔扰动模式中运动体的运动呈稳定状态,其原因是封闭空腔改变首发尾空泡的演化过程,该过程的流场不对称力较单发运动体入水时尾空泡演化产生的作用力小,随后的碰撞作用力相对较小,不足以破坏首发的稳定;在过渡扰动模式中,首发运动可能较单发运动体入水稳定,说明了次发的高压扰动对首发影响的不确定性;最后在弱扰动模式中,其运动特征同单发相比存在较大区别,主要原因除了入水偏差还包括模型磨损。

图16 不同初始间距下运动特性变化规律Fig.16 Variation of motion characteristics of rotary bodies at different initial spacings
对于次发运动体:当C>0时,说明运动体运动稳定性较单发运动体入水差;当C=0时,运动特性与单发运动体入水时相同,处于稳定状态。次发的运动特征分布与首发类似:碰撞模式中运动稳定性最差,封闭空腔扰动模式中,运动稳定性良好。
3 结论
本文针对vf0=1.47 m/s、vs0=1.73 m/s的深闭合流场下回转体串联入水过程,开展了入水初始间距对运动体的空泡及运动特性影响研究,分析了典型工况中的空泡演化特征与纵向位移及偏转角规律,以及不同入水初始间距下运动体空泡演化及运动稳定性分布。得出以下结论:
1)随着入水初始间距增大,回转体串联入水依次出现4种运动模式:碰撞扰动、封闭空腔扰动、过渡扰动和弱扰动模式。
2)碰撞扰动模式中,首发运动体无尾空泡结构,空泡长度受碰撞影响会产生增大和减小的变化,纵向位移较单独入水时大。
3)随着入水初始间距增大,次发运动体的入水空泡形态逐渐接近单独入水空泡:d为0.3D~2.3D时,其头部无入水空泡生成;d为3.0D~6.4D时,头部空泡尺寸随着入水初始间距增大而增大,于d=5.50D附近时产生深闭合型入水空泡。
4)不同运动模式中,两运动体的运动特征存在较大差异;其中碰撞扰动模式中两运动体稳定性最差,封闭空腔扰动模式会对促进首发运动稳定。本文中首发运动体运动不受影响的临界d=3.5D左右。
