基于人像分割的智能搜救无人机系统设计
2020-08-12吕祖盛江子岍
王 蓉,吕祖盛,孙 嘉,江子岍,肖 建
(南京邮电大学 电子与光学工程学院,江苏 南京 210023)
0 引 言
近年来,许多“驴友”喜欢近距离探索自然。但是有些时候“驴友”会在野外步入险境,需要外界的救援。传统的搜救方式由于耗资大、范围不精确、巡查时间长,导致搜救效率低下。例如,2017年8月8日九寨沟地震中就暴露了现有搜救系统存在的巨大缺陷。由于九寨沟地形复杂多样,传统的人力搜救不仅高成本低精度,还可能会因为灾区的天气和通信等条件过于恶劣而给搜救人员带来巨大的阻碍和危险。于是,方便灵活且精度较高的搜救方法成了野外救援的一个研究课题。传统的人力搜救暴露出的成本高、搜索速度慢等问题也促进了无人机智能搜救系统在野外救援方面的应用[1]。无人机作为飞行机器人,具备小巧便捷、活动范围广、自由度高等特点,因此近年来被广泛应用于军事、农业等领域。文中设计了一款基于人像分割技术的搜救系统。无人机通过摄像头在空中实时采集图像并进行图像回传和GPS定位,便于搜救人员确定当前受困人员的位置、状态以及环境。以最快的速度规划最优路线并进行搜救。通过在公园、学校操场和山地等多种户外场景中的测试,证明该系统有效可行,能适用多种复杂的野外场景并满足实际使用需求。
1 搜救无人机整体方案设计
当搜救人员收到有人员遇险的消息后,会给无人机下达救援指令。当无人机飞至事故区域上方时先进行自检,以确保能正常飞行,然后根据地面站传来的事故区域的两个对角坐标制定蛇形路径进行巡检。在巡检时,无人机回传当前视野图像并进行GPS定位。地面站将接收到的图像进行整合分析: 采用人像分割技术进行人体目标检测[2-3]来确定遇险人员,并通过ORB特征提取合成大型高清航拍影像,结合遇难者GPS位置坐标帮助搜救人员确定救援路线。
2 无人机硬件系统
使用Pixhawk作为飞行控制器,能更好地实现姿态调整和GPS巡航。使用STM32F1控制Pixhawk各通道油门,通过MAVLink协议进行飞行器自检和任务下达。无人机搭载树莓派作为图像采集和通信单元,用于图像获取、视频编码和远程图像传输。同时,树莓派也用于连接STM32F1和地面站,进行远程的数据传输和任务下达。本系统巡检设备安装在云台上,使用8 mm焦距的镜头,搭载大功率WIFI模块,保证无人机和地面站进行稳定的数据交互和图像传输。无人机飞行高度17 m,速度20 m/s,每秒采集3张图像,完成一平方公里巡检任务需要8分钟。
3 人体目标检测算法设计
3.1 神经网络的选择
在传统的行人检测等人像检测任务中,多用物体检测的神经网络框架进行检测,例如Faster-RCNN[4]、SSD[5]、YOLO[6]等,都能达到较好的识别精度和速度。但是在野外搜救中,由于环境较为复杂,有时候会出现人像被遮挡的情况,而且因为应用环境的特殊性,每一张图像都十分珍贵,不能容忍物体检测出现识别不到的情况,并且在识别过程中对预测区域与真实区域的交叠率要求也不太严格。因此,选用由谷歌开发的DeepLab V3+[7]图像分割神经网络来进行人像检测任务,使用Xception[8]神经网络进行特征提取。DeepLab V3+结合了空间金字塔模块[9-10]在输入feature上应用多采样率扩张卷积、多感受野卷积或池化,探索多尺度上下文信息和编解码器结构通过逐渐恢复空间信息来捕捉清晰的目标边界的优点。DeepLab V3+在PASCAL VOC 2012上验证了模型的有效性,在没有添加任何后端处理的情况下达到了89% mIoU。
3.2 DeepLab V3+神经网络框架
使用的DeepLab V3+神经网络框架如图1所示。编码器由Xception神经网络、ASPP和一个1×1的卷积组成[10]。DeepLab使用了深度可分离卷积和带孔卷积以提升网络的性能。下面着重介绍ASPP(带孔空间金字塔池化)的特点以及在文中的应用。

图1 DeepLab V3+神经网络框架
ASPP(atrous spatial pyramid pooling,带孔空间金字塔池化),就是对同一特征图用不同大小的卷积核进行卷积操作,以实现对不同大小特征的感知。使用带孔卷积来调整感受野的大小,同时使用深度可分离卷积来减少参数和提高运行效率。文中使用1 024×1 024×3的图像作为Xception神经网络的输入,输出为1 024×1 024×1的图像蒙版。ASPP使用了1×1卷积,3×3 rate=6、12、8的带孔卷积和传统的pooling叠加。图像在经过神经网络运算后得到的蒙版,需要再经过膨胀运算以消除蒙版中的一些因识别不全而产生的空洞。在本次项目中测试使用的GTX1060 GPU,DeepLab V3+神经网络框架总参数为41.25 M,训练使用10万张航拍图像,测试mIoU可达72%,运行速度可达3.2 FPS。
图像分析系统运行流程如图2所示,主要分为人像分割模块和图像拼接模块。图像由无人机摄像头采集,使用WIFI模块实时地将图像信息与当前GPS坐标信息反馈给地面站,地面站同时将图像传入人像分割模块和图像拼接模块进行处理。

图2 图像分析系统流程
其中,图像分割模块负责人像搜索的任务,将图像经过Xception特征提取、ASPP多尺度特征提取以及上采样等一系列处理后得到人像分割蒙版。在本项目中,设定人像分割蒙版阈值为0.5,若蒙版中存在置信度大于0.5的像素点,则认为是人像检测成功,随即在地面站上生成一条包含该图像、蒙版、无人机拍摄该图像时的GPS坐标和人像区域大小信息的记录,供搜救人员查看。
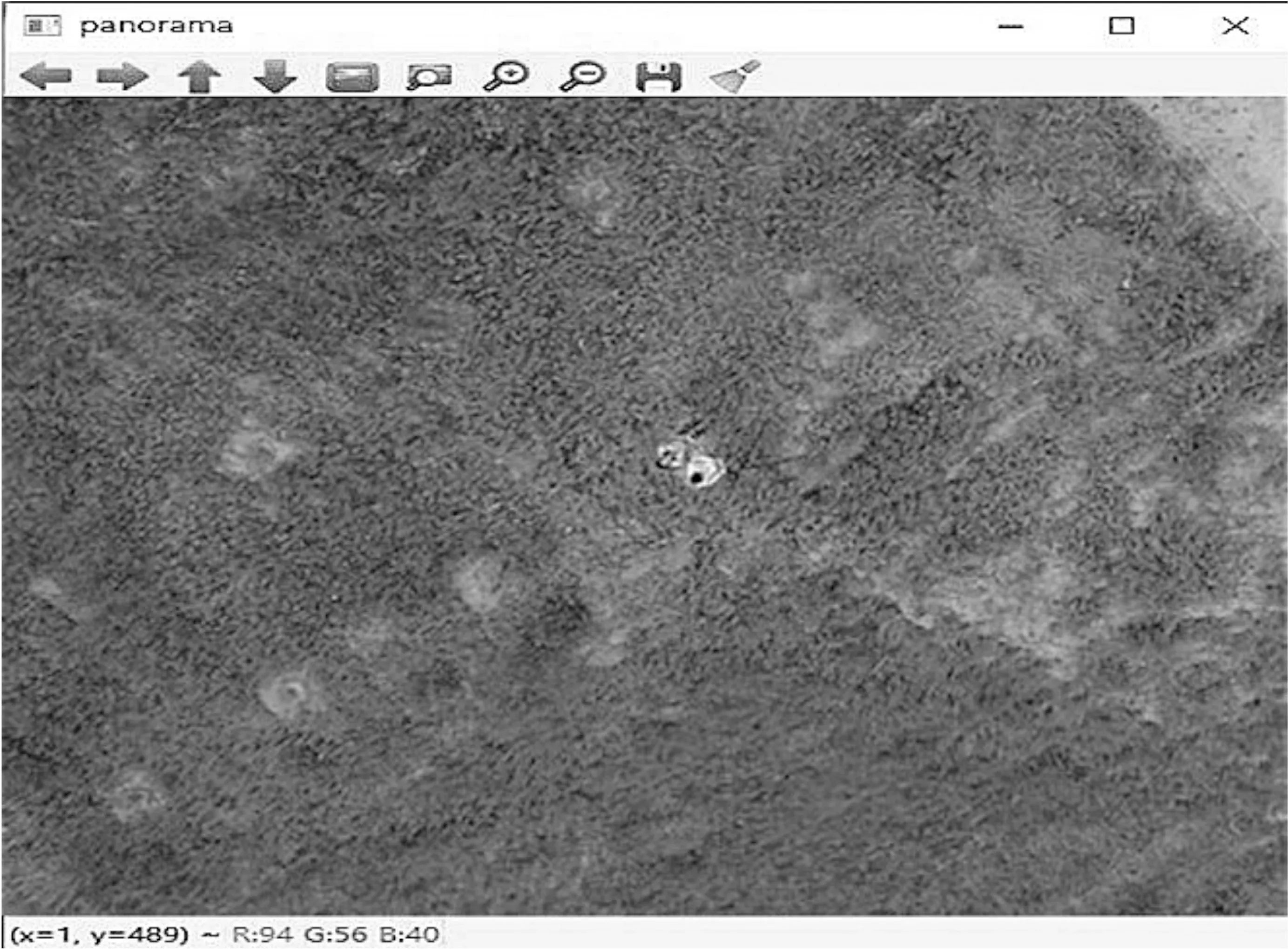
图像拼接模块负责将图像进行拼接,生成一张覆盖整个航拍区域的超高清全景影像。该模块对输入的图像进行尺度不变特征提取、特征点匹配、计算变换矩阵和拼接去缝操作,将输入的图像依次进行拼接。当无人机完成一列巡检任务掉头进行第二列巡检时回传掉头信号,图像拼接模块完成当前列图像拼接任务,并保存图像。当无人机完成下一列巡检任务时,将列图像进行拼接,得到两列图像的拼接结果图,依次进行该过程直到无人机完成本次搜救任务。
4 图像拼接算法设计
4.1 图像特征提取
系统中使用ORB(ORientedBrief)算法进行特征提取[11-13]。ORB特征提取的优点在于效率高,约为SIFT运行速度的100倍,SURF运行速度的10倍。提取特征的准确度相较于FAST算法也要好得多,综合性能较强。经多次测试,该算法对两张500×500的图像进行特征点提取仅耗时200 ms。其不足之处在于提取的特征不具备尺度不变性。但是由于文中无人机始终与地面保持着一定高度飞行,所以几乎不存在尺度变化,因而该缺点影响可以忽略。
4.2 特征点匹配
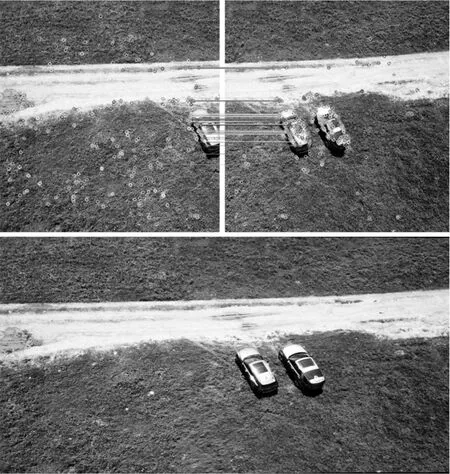
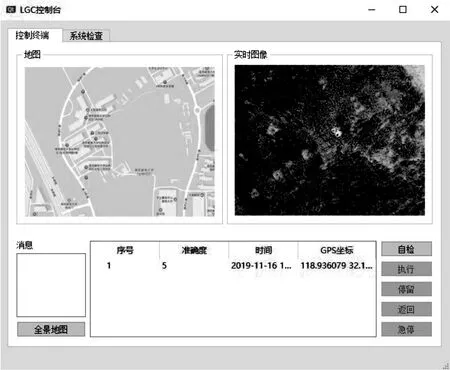
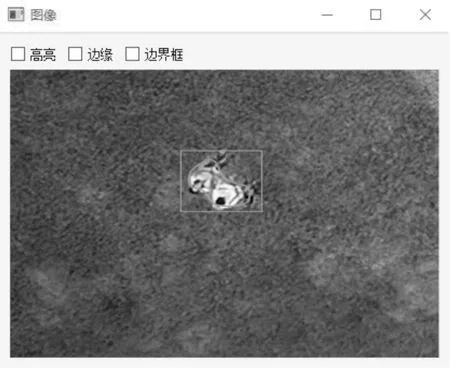
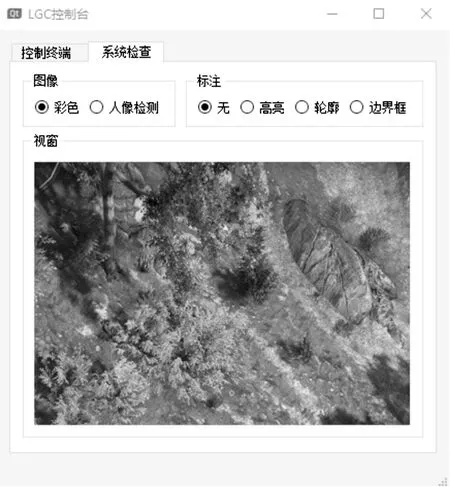
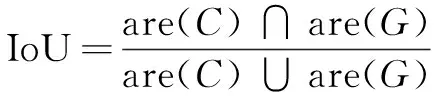
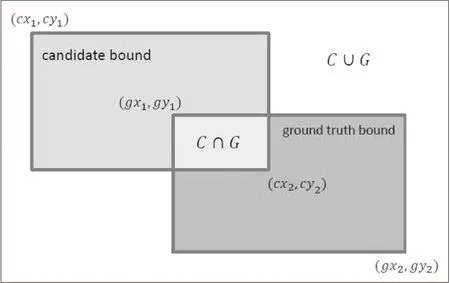
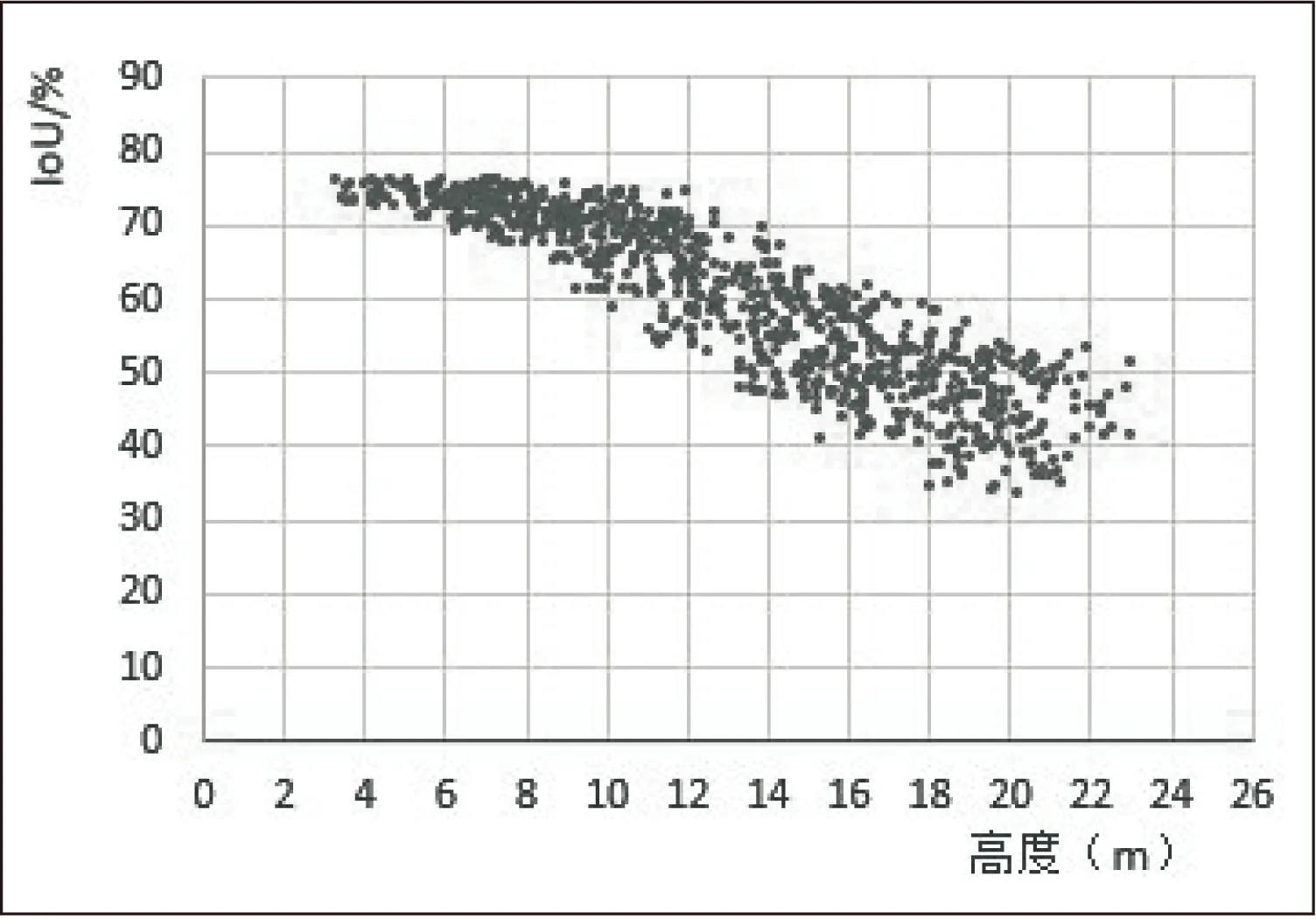
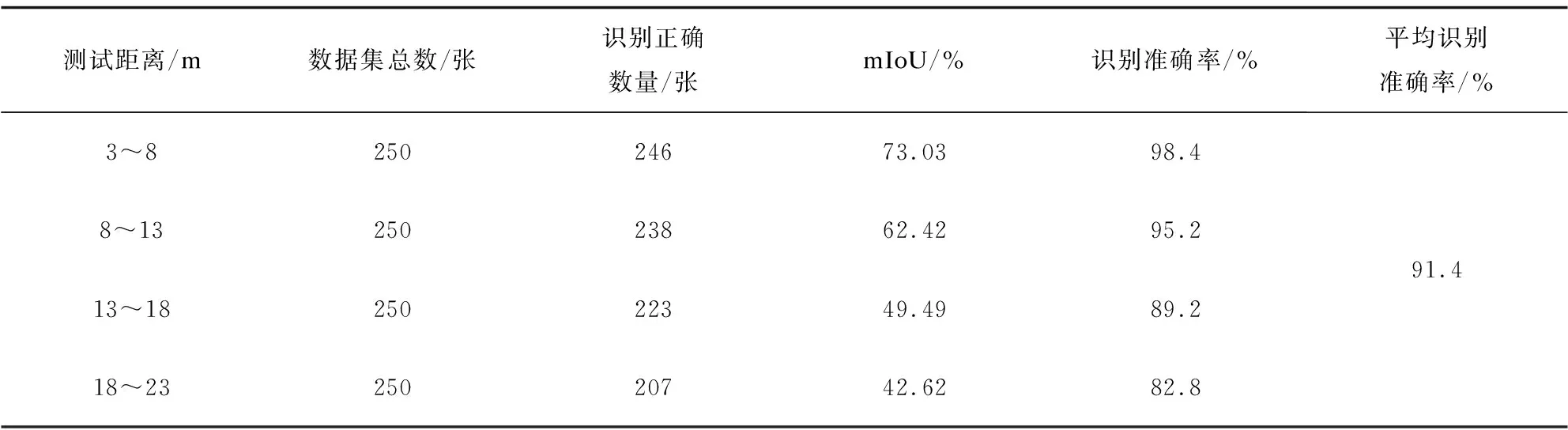
对图像做特征点匹配,即使是用SIFT算法效果也是非常糟糕的,为了减少特殊原因产生的误匹配关键点,可利用式(1)求得比例系数R。在本系统中,设定阈值T=0.5,将图像A与图像B中求得R (1) 其中,D1为图像A中某一特征点与图像B所有特征点欧氏距离的最小值,D2为图像A中某一特征点与图像B所有特征点欧氏距离的次小值。 获得了匹配特征点后,用RANSAC方法[14-15]计算多个二维点对之间的最优单映射变换矩阵,使用投射变换将图像A变换至图像B的坐标空间,并拷贝至图像C中。在拷贝的过程中由于光照等环境因素,直接拷贝拼接会使得接缝过于明显,文中使用加权相加的方式来进行图像融合。图像融合公式为: (2) 其中,PX为结果图像C在X位置处的像素值,PAX为图像A在X位置处的像素值,PBX为图像B在X位置处的像素值,Xbegin为拼接图像相交起点,Xend为拼接图像相交终点。图C为图A和图B拼接后的结果(见图3),实验证明ORB算法能够快速准确地匹配到有效特征点并进行图像拼接。 图3 图像拼接效果 文中开发了一款配套的用户界面(见图4),使用户能以更加便捷的方式操作本系统。系统由两大选项卡组成:控制台和系统检查。控制台负责用户在使用时的所有操作,系统检查负责用户在使用前进行无人机图像回传情况、人像分割运行情况等的检查。控制台界面由4大部分组成,分别是地图界面、无人机实时航拍图像界面、消息记录界面和控制按钮。地图界面可供用户定制巡检区域;实时航拍界面可供用户实时地观察到无人机的航拍影像;消息记录界面会在每次人像分割成功后生成一条记录,双击记录可打开人像分割查看界面,结束一次巡检即可点击全景地图按钮打开查看拼接界面;控制按钮进行无人机的自检、执行、停留、返回和急停。 (a)控制台操作界面 (b)人像检测记录 (c)全景拼接 (d)系统检查 交并比(intersection-over-union,IoU),是预测区域(candidate bound)与真实区域(ground truth bound)的交叠率,即它们的交集与并集的比值。IoU在最理想情况下是完全重叠的,即比值为1。IoU的平面示意图如图5(a)所示,由图5(a)可推导出IoU的计算公式为: (3) mIoU值是一个衡量图像分割精度的重要指标。mIoU可解释为平均交并比,即多张测试图像的IoU的均值。为了验证该无人机搜救系统在野外巡检时的人像检测精度,从3 m~23 m拍摄高度的航拍图像中每隔5 m选取250张图像,共计1 000张图像进行IoU值和人像识别率测试(见表1)。 (a)IoU平面示意图 (b)IoU-航拍高度关系 图5 测试结果分析 准确率计算公式为: (4) 其中,对于单个高度段的测量结果,Acc表示识别准确率,RS表示识别成功的图片数量,Sum表示测试集总数,实验中Sum默认取值为250。整合四个高度段的测试结果并计算其平均准确率mAcc,计算公式为: (5) 测试结果显示,系统的视觉分析功能在无人机飞行高度为18 m以下时都有非常好的识别效果,识别准确率大多都能达到90%以上。但其中仍存在人像无法识别的情况,原因主要有两个方面:一方面,随着无人机飞行高度的不断增加,人像在图像中的占比越来越小,导致IoU在持续减小,具体变化情况如图5(b)所示;另一方面,在不同的遇险环境下,遇难者可能会被树木、草丛等物体遮挡,导致人像在图像中的占比大小不一致。这两种情况都会不同程度地对识别的准确率造成负面影响。实验表明,该系统测试稳定,识别准确率高,正常情况下能满足当前对野外遇险人员的搜救需求。 主要从目标检测、图像拼接、上位机系统等方面对智能搜救无人机进行了设计。设计的无人机搜救系统功能完善,操作简便,实时性好,能较大地减少野外救援的工作量。实验表明:该搜救系统稳定性好,能实现多方位巡检。目标检测及图像拼接的效率和精度也较高,可以满足多种复杂环境下的搜救需求。4.3 图像拼接与去缝
5 上位机系统设计
6 实验与结果分析
7 结束语
