混合模型的运动目标检测与跟踪算法
2020-08-04郎晓彤
郎晓彤

摘 要: 针对运动目标检测与跟踪算法计算准确率低、效果差的问题,结合Kalman滤波算法,提出一种基于高斯混合模型的运动目标检测与跟踪算法。对传统的权重更新机制进行改进,以保证背景的持续更新状态。建立高斯混合模型,对运动目标图像进行处理,对图像中的参数信息进行实时更新,在Kalman濾波器的性质影响下进行目标跟踪,将获取的运动目标位置作为信息输入,完成运行并跟踪。在更新的过程中,根据运动目标的状态确定矩阵,目标遮挡也不会影响追踪的效果。结果表明,利用Kalman滤波器对运动目标进行跟踪,可以取得良好的运动目标跟踪效果。
关键词: 高斯混合模型; 运动目标检测; 跟踪算法; 权重更新; 目标遮挡; 运动目标跟踪
中图分类号: TN911.1?34 文献标识码: A 文章编号: 1004?373X(2020)03?0070?04
Moving object detection and tracking algorithm based on mixture model
LANG Xiaotong
(Zunyi Normal University, Zunyi 563000, China)
Abstract: In combination with Kalman filtering algorithm, a moving object detection and tracking algorithm based on Gaussian mixture model is proposed to deal with the deficiencies of low accuracy and poor effect in conventional moving object detection and tracking algorithm, and improve the traditional weight updating mechanism to ensure continuous updating status of the background. The Gaussian mixture model is created to process the moving object image, update in real time the parameter information in the image and track the object with the performance influence of Kalman filter. The acquired moving object position is taken as information input to complete the operation and tracking. In the process of updating, matrix is determined according to the status of the moving object. In the case of the object occlusion, the tracking effect will not be affected. The results show that the Kalman filter can achieve good tracking effect of moving objects.
Keywords: Gaussian mixture model; moving object detection; tracking algorithm; weight updating; object occlusion; moving object tracking
0 引 言
在信息化的时代背景下,各种新兴技术迅速发展,通过视觉感官的方式获取外界信息成为了一种新的趋势。在人们的生活中,到处都有视频监控,各个领域对视频监控都投入了大量的财力。人眼长时间观看视频难免会存在疏漏。因此,亟需一种稳定可靠的智能控制技术解决这种疏漏问题。在智能化的发展基础上,采用无人监管模式,对监控中的图像进行自动分析与处理,发现异常后及时触发警报。在视频图像处理技术中,运动目标检测与跟踪技术起着关键性作用,在智能监控系统中有着极高的影响[1]。运动目标检测可以准确地将运动物体从背景图像中进行分离,从而确定目标的具体位置所在;运动目标跟踪则是将检测到的参数信息传递到相应模块中,由相应的技术对这些参数进行分析、处理与统计。运动目标检测与跟踪是智能监控系统的技术,其算法计算更是影响到系统的精确性。现实情况是运动目标检测与跟踪容易受到周围环境因素的影响,如复杂背景、光照突变场景、遮挡、阴影等,在比较复杂的场景下,对运动目标检测与跟踪算法的要求更高,显然现有的算法还无法适应于所有的情形中。高斯混合模型对复杂环境有较好的适应能力,基于此,本文设计一款基于高斯混合模型的运动目标检测与跟踪算法,以弥补现有算法中存在的缺陷。
1 高斯混合模型相关理论
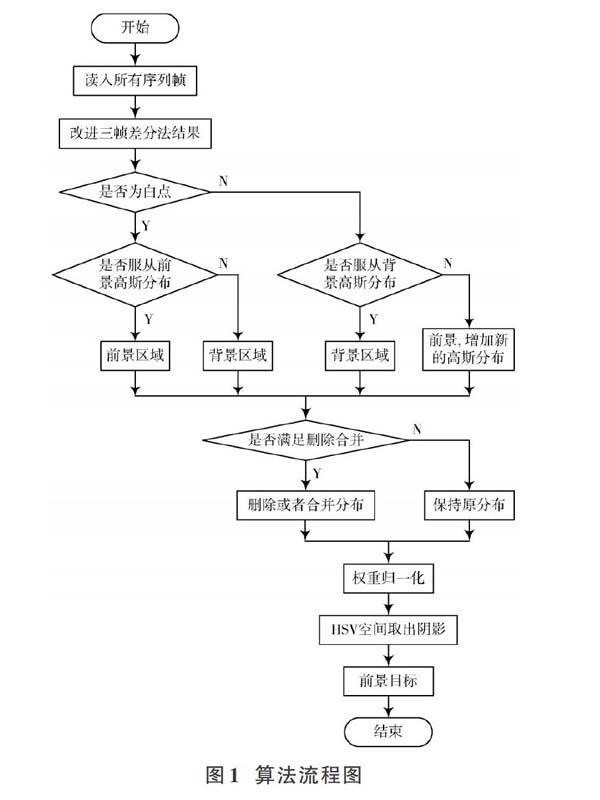
运动目标检测在视频监控领域中是一种非常关键的技术,被广泛应用在各个领域的监控中。现有的算法在检测过程中容易受到外界因素的干扰,影响最终的检测结果。针对存在准确性较差的问题,很多专家学者相继提出了多种算法来解决这种问题,如帧间差分法、光流法、背景差分法[2],虽然这些算法都有各自的特色,但是会受到光照原因的影响,进而影响结果判断的准确性。对此,本文提出了一种基于高斯混合模型的运动目标检测与跟踪算法,该算法解决了传统算法中存在的光照突变敏感的问题,利用高斯模型的个数调整场景,提高了场景自身的适应性能力。算法流程如图1所示。
1.1 运动区域提取
在传统的高斯混合建模中,像素是一个个单独存在的个体,虽然能够在一定程度上保证每帧图像及时更新,但是无法保证其稳定性。为此,可以先进行运动区域提取[3],再进行分块处理,这样的方式可以大大提高处理效率。以往的差分法算法简单,可以快速检测到运动区域,阈值决定了帧间差分法的性能,因此,阈值的选择非常关键,过高或过低的阈值都会影响性能。因此,融合Canny检测算法,可以有效解决差分法中边缘不连续的问题。
假设[T=3σ+μ1,Δz1,Δz2]是动态阈值,可以表示为:
式中:[M×N]表示像素点个数;[ξ]表示抑制系数。
用Canny算法对帧进行提取,可以得到边缘图像[Bi(x,y)],通过对边缘进行处理可以得到更好的图像效果。将[Bi(x,y)]与差分图像联合运算[4],可以得到:
利用改进后的三帧差分法所得到的运动区域也会存在一些漏洞,因此需要对其进行形态学运算,以获取完整的运动区域。差分法所检测到的运动目标区域受限,接下来采用高斯混合建模的方法对前景区域和背景区域进行建模[5]。
1.2 高斯混合模型
高斯混合模型需要对图像中的每一个像素点进行建模,可以表示为:
式中:[K]表示模型个数;[ωi,t]表示权重;[μi,t]表示均值;[?i,t]表示协方差矩阵。
高斯混合模型建模步骤如下:
1) 模型初始化:将第一帧作为初始化的背景图像。
2) 模型的参数更新:将当前帧的像素点与多个高斯点进行比较。如果像素点无法与高斯分布同时存在,则像素点的[μi,t],[?i,t]背景值会受到影响。
3) 背景提取与前景检测:按照优先级的排列方式对高斯分布进行排序。按照式(4)进行判断:
式中[T]表示阈值。
1.3 改进的背景建模方法
在现有的高斯混合模型中,所包含的像素点个数都是固定不变的,而在实际的运动目标检测中,像素值千变万化,因此现有的高斯混合模型无法适用于对场景的切换。为了增加高斯分布的合理性,需要按照下列方式产生高斯分布[6]:
式中:[β]表示平衡系数,[0<β<1]。当[k]值最大时,需要将权重最小的高斯分布进行删除。
当图像中的像素点逐渐稳定后,可以排除优先级的排序,删除高斯分布、合并分布,留下最优的高斯分布图像,以更好地适应更多的场景变化。
2 基于改进的高斯混合模型运动目标检测与跟踪算法研究
本研究整个过程分为检测部分与跟踪部分。检测部分获取运动目标参数,输入到Kalman滤波器中并运行,其算法流程如图2所示[7]。
2.1 运动目标检测
2.1.1 高斯模型的初始化与更新
将第一帧图像作为高斯模型中的均值[μ1],在更新时,对存在的高斯分布按照优先级的方式进行大小排列,匹配当前帧像素值与高斯分布,匹配方式为:
如果已经存在匹配好的高斯分布,需要按照式(9)的方式进行:
式中[α]表示学习率。
高斯分布在排列时,权重决定了背景,则背景模型可以表示为:
式中[T]表示权重比例。
2.1.2 改进的权重更新机制
当物体进入场景后会发生停滞,在视频帧中作為背景,当背景中的物体开始运动后,物体会将遮挡的部分作为背景进行展示[8]。在高斯混合模型中,利用式(9)表示不同的场景状态。[α]为固定值不变,则权重更新的速率也不会发生任何变化。为了使场景中的物体可以变成背景,需要一种新的更新机制。当检测到的物体目标静止时,需要采取更新手段,以达到快速生成背景图像的目的。具体的操作方式为:当像素点与高斯分布发生匹配时,像素点会进入到一个相对稳定的状态,按照式(9)进行权重更新。权重更新的过程可以采用以下方式进行:
式中:[Δt]表示时间差值;[αs<1]。
2.2 运动目标跟踪
2.2.1 改进的Kalman滤波预测算法
Kalman滤波在1961年被提出,包括更新与预测两个阶段。在预测阶段,可以采用Kalman滤波器方程计算出目标状态的最佳值,并对得到的参数进行预估。在更新的过程中,可以将预测阶段所获取的最优估计值采用预测值进行修改,利用协方差矩阵的方式衡量估计值的准确性,以判断运动模型的目标值与实际值之间的匹配结果。
Kalman滤波的工作原理为:使用动态系统进行依次预测,以得到最佳的状态值,其表达方程为:
式(12)分别表示Kalman滤波的状态方程与观测方程。其中,[X(k)]表示系统状态;[A]表示转移矩阵;[U(k)]表示确定性输入;[B]表示控制矩阵;[Z(k)],[W(k)],[V(k)]表示状态观测值、过程噪声、测量噪声;[H]为观测矩阵。
观测矩阵表示为:
状态转移矩阵表示为:
式中[Δt]表示间隔时间。
观测噪声协方差表示为:
在实际的场景中目标之间会出现遮挡问题,影响观测值判断的准确性,如果矩阵[R]不变, 会使得跟踪的数据不准确。因此,为了提高跟踪的准确性,提出了一种基于矩阵的自由选择算法解决这种问题。
2.2.2 运动目标跟踪过程
为了更精确地表达运动目标,需要结合物体本身的一些特有信息作为跟踪背景,如颜色、运动方式等。颜色作为一种跟踪依据,不会随着场景的改变而发生改变,因此,可以将颜色作为跟踪的条件,求取RGB颜色直方图,其计算方式为:
式中[(x,y)]表示位置。当物体的位置与速度可以准确描述物体的运动状态时,需要使用Kalman滤波器中的初始值进行表示,在初始的状态下,如果[U(k)]=0,则状态方程可以表示为:
式中:[P]表示位置向量;[V]表示速度向量。将位置向量与速度向量作为初始值输入Kalman滤波器中,可以得到最终的运动目标。
3 实验验证
3.1 实验配置
利用Linux操作系统,8 GB内存,Intel双核CPU 3.2 GHz,VC 6.0++编程实现仿真实验。为了体现出该算法的真实有效性,分别在不同的环境下进行实验。
3.2 实验分析
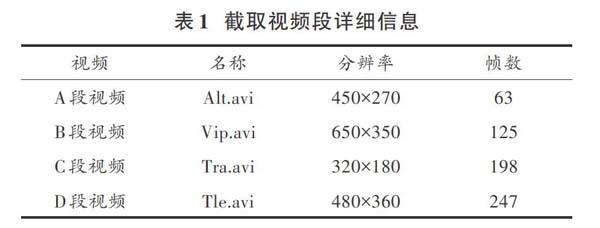
为了证明高斯混合模型的运动目标与跟踪算法的有效性,需要对运动目标进行检测,并全程跟踪,对其进行仿真实验,并与其他的方法进行比较。利用改进后的高斯混合模型背景差分法对运动目标进行检测,为了得到更加精确的计算结果,先假设各个像素之间的像素点都是相互独立的,需要对彩色图像进行灰度化处理。改进后的高斯混合模型背景差分法在进行处理之前,需要先对输入背景进行分块处理,图像块为3×3,用平均值表示。最大高斯分布上限为6,初始值为[w],权值为0.3,截取不同阶段的视频信息,如表1所示。
采用帧差法、光流法和改进后的高斯混合模型进行对比,运动目标检测时间如表2所示。
运动目标检测效果如图3所示。
以图3a)原始图像为基础,分别对原始图像采用帧差法、光流法、改进后的高斯混合模型进行检测,得到改进后的高斯混合模型对于运动目标的检测效果明显优于帧差法与光流法。帧差法对运动目标检测的轮廓完整,可以有效解决阴影区域的问题,但是所体现的信息丢失较为严重;光流法虽然很好地保留了运动目标的信息,但是由于检测的目标范围太大,为检测结果增加了很多无用的信息,影响检测结果的准确度;改进后的高斯混合模型获取的运动目标信息完整,检测结果更加准确。
4 结 语
在智能化的发展背景下,越来越离不开智能视频监控系统所带来的便利。在智能视频监控系统中,运动目标检测与跟踪是非常关键的组成部分,其算法的运行性能直接关系到整个系统的运行性能。本文以运动目标检测与跟踪为研究背景展开讨论,在高斯混合模型的基础上进行算法改进,引入Kalman滤波算法完成运动目标跟踪。在高斯混合模型的重要阶段,改进现有的更新机制,完成背景之间的相互转换,以保证背景图像的同步更新。利用改进后的Kalman滤波算法完成对场景变化的自适应取值。不管目标是遮挡还是阴影,都可以完成目标的准确跟踪,提高准确率。
参考文献
[1] 杜鹃,吴芬芬.高斯混合模型的运动目标检测与跟踪算法[J].南京理工大学学报(自然科学版),2017,41(1):41?46.
[2] 高野.基于改进高斯混合模型的体育视频运动目标检测与跟踪[J].现代电子技术,2017,40(19):91?93.
[3] 郅季炘.基于改进高斯混合模型的运动目标检测与跟踪[J].现代电子技术,2017,40(21):69?72.
[4] 沈婷婷,仲思东,鄢文浩.改进的边缘高斯混合模型运动目标检测[J].电光与控制,2017(4):47?49.
[5] 杨林.视频序列中运动目标检测与跟踪算法研究[D].长春:长春工业大学,2017.
[6] 唐洪良,黄颖,黄淮,等.改进的自适应高斯混合模型运动目标检测算法[J].现代电子技术,2017,40(11):73?75.
[7] 许益成,谭文安,陈丽婷.基于改进混合高斯模型的运动目标检测算法[J].控制工程,2018,25(4):630?635.
[8] 時磊,鲁华栋.基于高斯混合模型的移动目标跟踪[J].微型电脑应用,2017(12):75?77.
