智能轨道快运系统
2020-08-03冯江华胡云卿
冯江华,肖 磊,胡云卿
(中车株洲电力机车研究所有限公司,湖南 株洲 412001)
0 引言
我国快速的城镇化进程和人们生活水平的提高,给城市现有交通体系造成了巨大压力[1]。虽然国家在交通设施上投入了巨资,2008~2017年这10年间我国的城市道路面积增长了74%,但是同期我国的汽车保有量却增长了230%,城市道路面积增长速度远远比不上汽车保有量增长水平[2]。在城市道路建设趋于饱和的情况下,大力发展公共交通,进行城市道路资源的再分配,构筑多元化、立体化、现代化的城市公共交通体系是解决中国目前交通拥堵问题的主要出路。
城市轨道交通具有运量大、快速、准点、节能环保、安全舒适等优点,成为我国一二线城市公共交通网络最重要的组成部分[3-4]。大中运量的轨道交通运输系统有地铁、轻轨和磁浮等;中低运量的轨道交通制式包括有轨电车、垮座式单轨、悬挂式单轨和自动旅客捷运系统(APM)等[5]。这些交通工具运能适中,旅行速度较快;这些交通制式是解决大运量客流的利器。据统计,截至2018年底,中国大陆地区共有35个城市开通了轨道交通,运营线路185条,运营总里程已超过5 760 km[6-7]。在已运营的7种轨道交通制式中,地铁一家独大,运营里程为4 354.3 km,主要集中在北上广深等具有经济实力的一二线城市[8]。另一方面,定位为地铁主干网络接驳、三四线城市的骨干交通、旅游特色功能线路的中/小运量交通制式(含单轨、磁浮、有轨电车、APM)也正在逐步发展。“十三五”期间,有32个城市规划建设单轨,72个城市规划建设有轨电车[9-10],众多的三四线城市迫切需要改善公共交通系统、提升城市形象、拥有中小运量轨道交通系统。但由于我国众多三四线城市人口数量、经济规模、城市规划、地形结构等不同,对中小运量轨道交通系统的需求呈现多样性。如何在中心(老)城区、既有桥梁和隧道等特定区域高效快速建设中运量骨干公共线路、如何在快速发展城市高效经济地满足客运需求并迭代发展、如何在城市新区快速成网运营等,这些挑战既蕴含巨大的机遇,又促生丰富的技术创新。
城市中运量交通的巨大市场规模引起了装备研发制造企业及资本的强烈关注,各种中运量交通制式纷纷进入到激烈的市场竞争中。传统中小运量交通制式在改变其基础设施投入过大、提升城市适应性的基础上,都在不断地进行技术改进[11-14];同时,以轨道化运营来提升其运输能力的快速公交系统也在我国众多城市开通[15]。2010年,中车株洲电力机车研究所有限公司(简称“中车株洲所”)开始探索、研发轨道交通与地面交通融合创新的类轨道行驶的新型车辆及系统,经历了原理研究、原型样机预研及试制、试验样车试制试验、工程化样车试制试验、工程示范等迭代创新过程,并于2017年6月2日正式向全世界发布了新的轨道交通制式——智能轨道快运系统(autonomousrail rapid transit,ART)[16]。
本文将对该ART的系统组成及特征、应用情况进行全面的介绍,并针对地面轨道交通发展的一些共性问题进行思考,提出未来ART的发展构想,从而让ART更好地融入城市交通,满足人们对运量适中、智能、舒适、快捷、环保的城市公共交通制式的需求。
1 ART架构及运行原理
ART具有城市轨道交通和地面公共交通双重属性,同时吸收了轨道交通准时、运量大、节能环保和地面公交运营灵活、综合成本低等优势。该系统主要由供电、通信信号、智轨电车(图1)、虚拟轨道、车站、检修中心6大基础部分构成。比照轨道交通系统,其最大的不同点在于用智轨电车代替轨道列车,用虚拟轨道代替了钢轨。这一替代在确保智轨电车具有有轨电车的安全与高效特性的同时,大大简化了系统结构,节省了系统的成本。ART与轨道列车系统的构成对比如图2所示。

图1 智轨电车工程化样车Fig.1 Prototype vehicle of autonomous-rail rapid tram
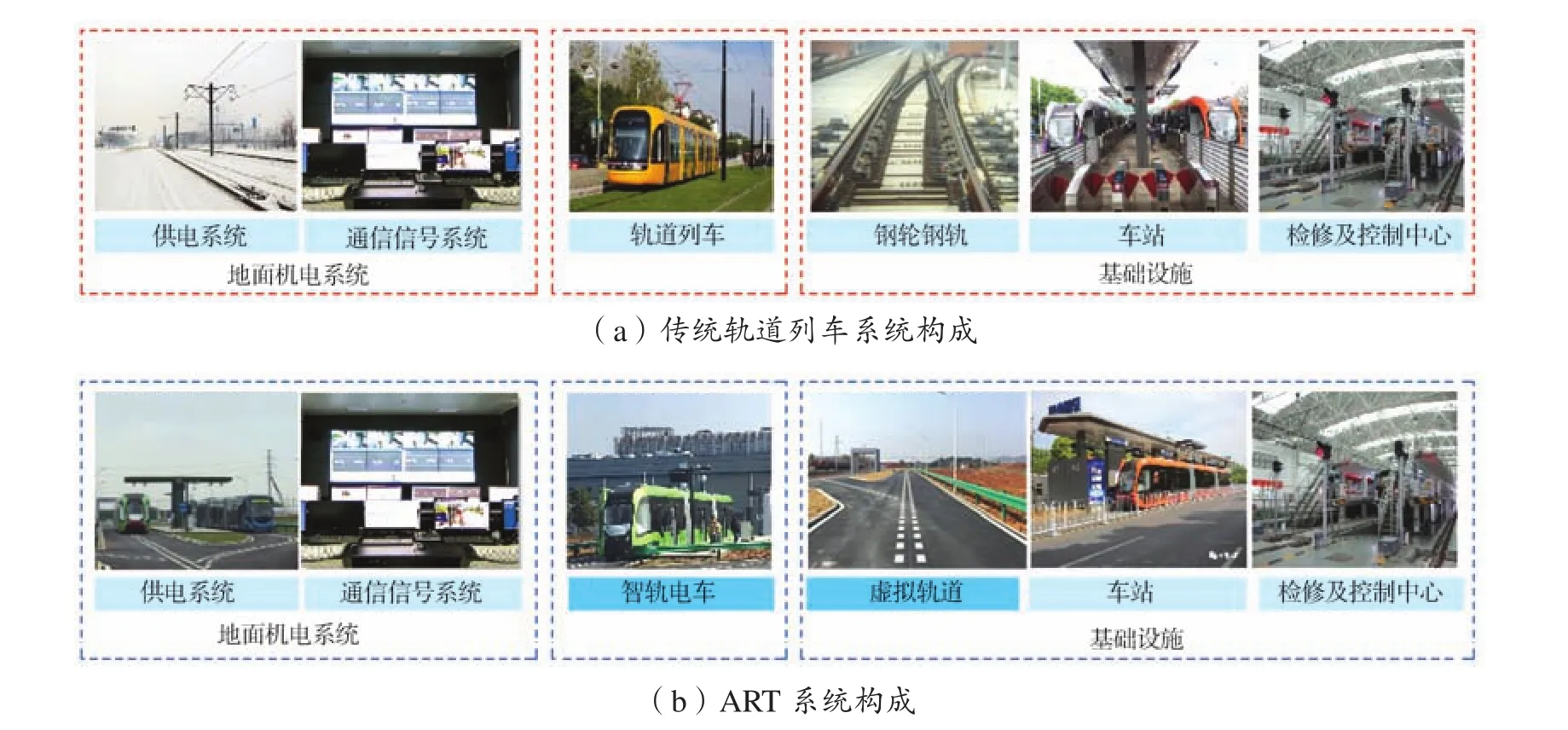
图2 ART与轨道列车系统的构成对比Fig.2 Comparison of the compositions of ART and tram system
智轨电车为采用100%低地板构架、全电驱动、具备多种受电方式的双向行驶多编组胶轮车辆。它采用自动循迹、轨迹跟随、自主导向等技术,实现在虚拟轨道下的类轨道行驶;同时采用主动防护技术对电车的行驶进行电子约束与安全保障。智轨电车的头车头轴自动地按照地面的虚拟轨道或高精度电子地图运行,其他各轴自动跟随头车头轴的行驶轨迹,实现与轨道列车行驶在钢轨上相似的类轨道行驶。
虚拟轨道则为行车线路或辅助线路上设置的特定标识,其为车载自动循迹系统中的光学感知、图像识别、激光检测等感知传感器提供导向特征输入,构建运行路径。
2 智轨电车
智轨电车是一种采用全轴转向、轨迹跟随控制技术,通过主动安全、车载信号、机器视觉控制等对车辆行驶进行电子约束的全电力驱动、沿虚拟轨道运行的铰接式胶轮车辆。目前典型的三编组智轨电车采用两动一拖结构,其编组形式为=Mc1 + Tp + Mc2=,其中Mc1与Mc2车厢带司机室模块,配备有驱动系统;Tp车厢无驱动装置,受流装置安装在Tp车厢;+为车间连接装置(含铰接装置和贯通道);= 为救援车钩的安装接口。三编组智轨电车主要参数如表1所示。
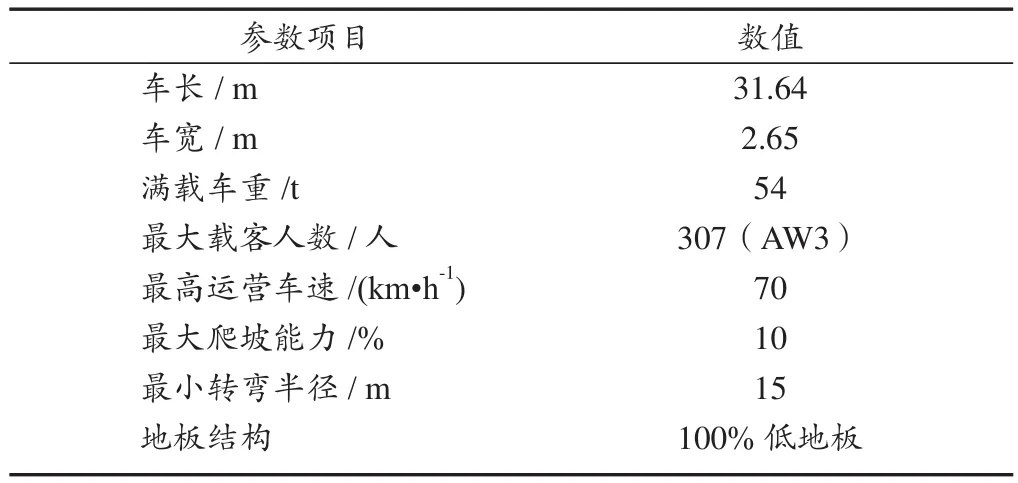
表1 三编组智轨电车主要参数Tab.1 Main parameters of the three-module ART
智轨电车的各个子系统分为两大类:
(1) 传统城市轨道交通车辆的平移系统,包括车体系统、走行系统、内外装系统、网络控制与监测系统、制动系统、牵引与辅助系统、储能系统、车载信号系统、车载乘客信息系统、网络化配电与数据采集系统等;
(2) 独有的智轨控制系统,包括多源环境感知系统、自动循迹感知与控制系统以及自主导向轨迹跟随系统。
2.1 车体系统
考虑到重量、成本、工艺及维护等因素,智轨电车车体由整体承载式铝合金全焊接结构的车身以及与转向架连接的耐候钢全焊接结构的构架组成。
智轨电车车体设计满足以下技术要求:(1)车体强度满足标准EN 12663Railway application-Structural requirements of railway vehicle bodies规定的P-Ⅴ类车辆要求;(2)车体碰撞满足标准EN 15227Railway application-Crashworthiness requiremens forrailway vehicle bodies规定的C-Ⅳ类车辆要求。图3示出智轨电车车体纵向压缩工况车体应力CAE分析云图。
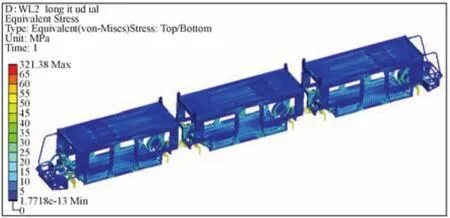
图3 智轨电车纵向压缩工况车体应力云图Fig.3 Cloud chart of vehicle body stress under longitudinal compression condition of autonomous-rail rapid tram
2.2 走行系统
智轨电车走行系统分为动力转向架与非动力转向架。动力转向架上包括橡胶车轮、空气悬挂、减速装置以及制动执行器;非动力转向架上包括橡胶车轮、空气悬挂、制动执行器以及中央弹簧储能式驻车制动器(作为安全制动装置)。
根据车辆承重要求,动力转向架与非动力转向架的承载均≥9 t,转向角度>17°,动力转向架输出扭矩大于24 000 N·m;非动力转向架中间通道处下凹,可以实现车辆乘客区全通低地板化。动力转向架与非动力转向架示意如图4所示。

图4 智轨电车转向架示意Fig.4 Bogie diagram of autonomous-rail rapid tram
2.3 内外装系统
智轨电车的整个乘客区经宽敞的走廊完全贯通。大的玻璃车窗占了车体外表面的70%,确保了整个车厢内的通透性。智轨电车内外装效果如图5所示。
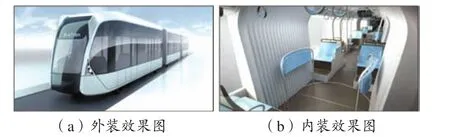
图5 智轨电车内外装效果图Fig.5 Exterior & interior decoration design sketch of autonomous-rail rapid tram
智轨电车内外装饰材料选用防火、环保、轻量化材料,其主要的内装选材包括金属材料、玻璃钢、碳纤维、蜂窝材料及泡沫材料等(图6)。
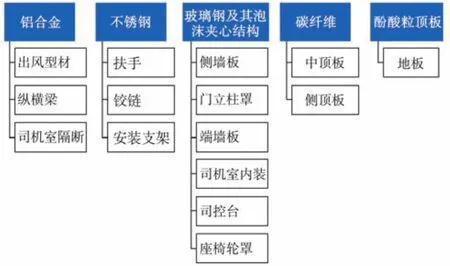
图6 智轨电车内装选材Fig.6 Interior decoration material used in autonomous-rail rapid tram
2.4 网络控制与监测系统
智轨电车网络控制与监测系统采用符合国际标准IEC 61375《铁路电气设备 列车总线》标准要求的实时以太网,实现控制指令、诊断数据及服务信息数据的实时传输;采用符合IEC 61131《工业自动化系统的程序编制》标准要求的开发环境进行控制应用开发,实现车辆的控制、监测和诊断功能。系统在拓扑上采用双通道冗余传输的环网交换技术,在物理上实现了车辆控制网络与信息服务网的融合。智轨电车网络及监测系统拓扑如图7所示。
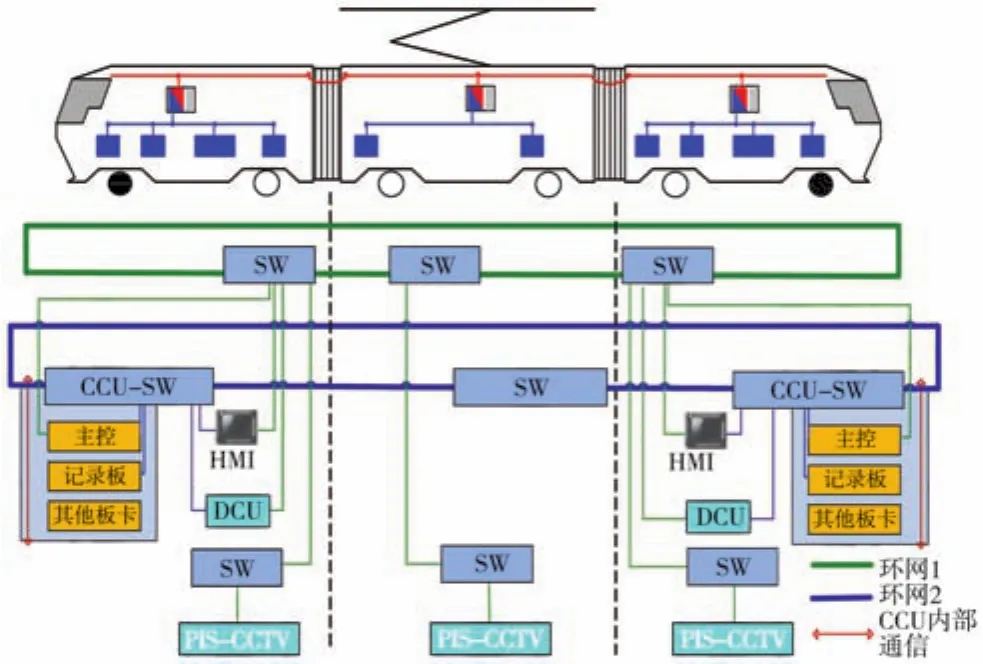
图7 智轨电车网络及监测系统拓扑Fig.7 TCMS system of autonomous-rail rapid tram
2.5 制动系统
智轨电车制动系统既需保证电车自身行车安全,尽量降低与道路上其他车辆及行人碰撞的风险;同时还需兼顾乘客舒适性要求,防止制动力变化过快导致乘客前俯后仰等问题。
智轨电车制动系统在结合有轨电车制动系统和公路交通EBS线控制动系统(electronic brake system, EBS)特点的基础上,设计了多种独立冗余制动模式,并针对各模式的制动提出了相应的技术指标(表2)。
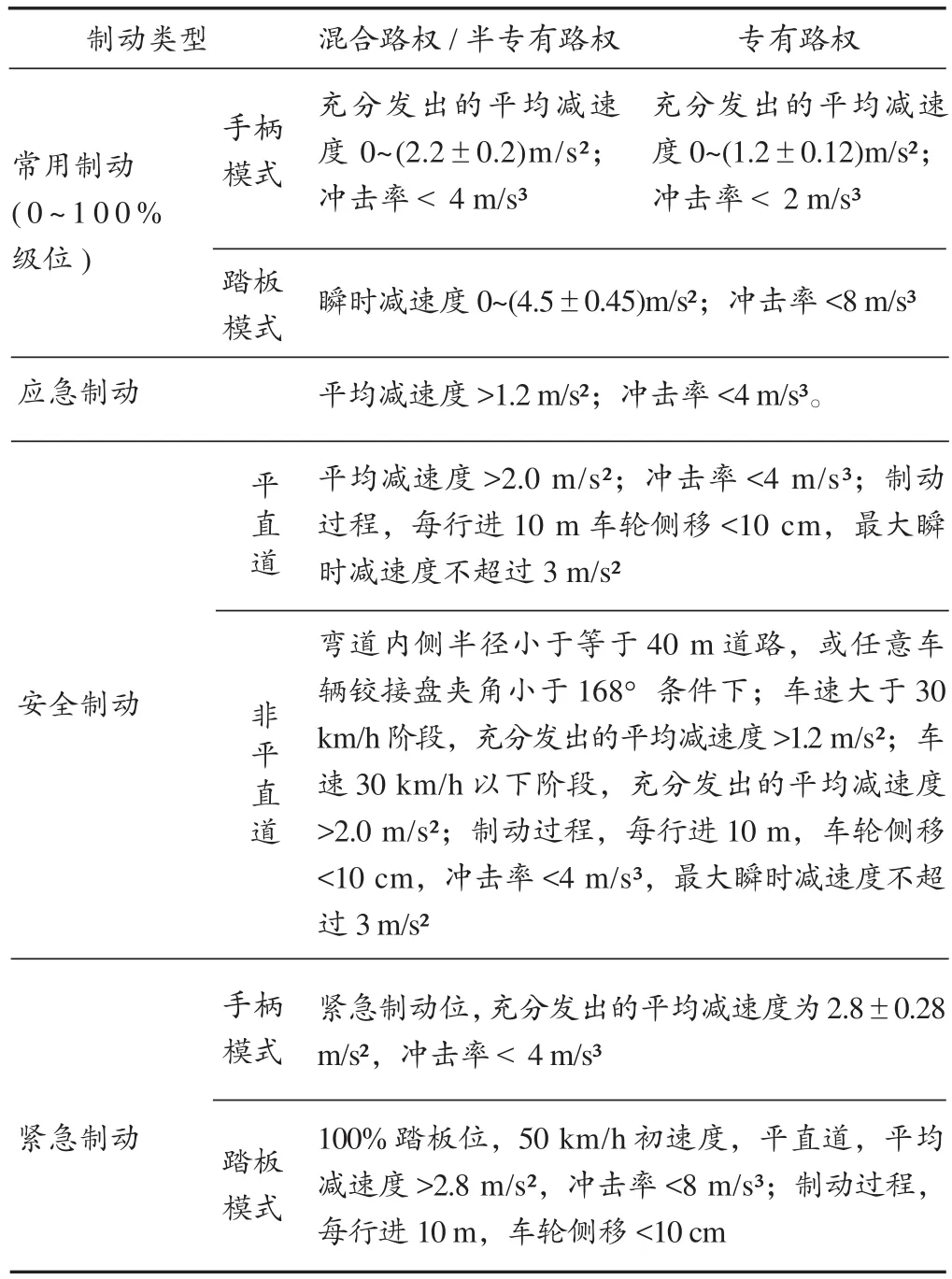
表2 智轨电车制动性能要求Tab.2 Braking system performance requirements of autonomous-rail rapid tram
2.6 牵引与辅助电源系统
图8为牵引与辅助电源系统示意,全车配备两套牵引系统和两套辅助电源系统,牵引与辅助电源部件通过功率电缆相连。牵引系统由VVVF逆变器及永磁牵引电动机构成,采用矢量控制技术和交流传动模块化设计,在实现牵引电机实时控制的同时,还具备牵引变流系统故障保护功能、模块级的故障自诊断功能。
辅助电源系统由两路独立的辅助逆变器和一路独立的充电机(三合一电源)、LC滤波电路、扩展供电电路、DC 24 V扩展蓄电池构成。辅助逆变器为车载交流负载供电;充电机可以实现恒压限流的功能,最大限度延长蓄电池寿命。LC滤波电路使三合一电源输出的PWM波变成平滑的正弦波。当任意一路逆变器故障时,通过扩展供电回路保证油泵电机、电控液压电机、空气压缩机等关键负载的正常工作;在应急情况下,蓄电池可为整车提供24 V控制电源。
智轨电车在平直道、AW2载荷工况下的列车牵引性能如表3所示。
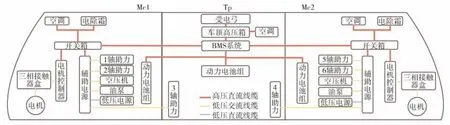
图8 智轨电车牵引与辅助电源系统示意Fig.8 Schematic diagram of traction and auxiliary power system of autonomous-rail rapid tram
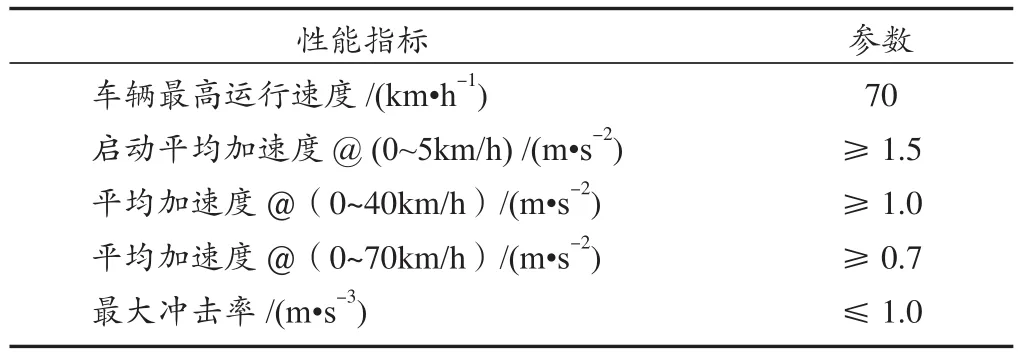
表3 动力性能Tab.3 Traction system performance
双牵引系统同时驱动,当单套牵引系统发生故障(即牵引动力损失1/2)时,满足AW3载荷下平路限速20 km/h运行,AW0载荷下10%爬坡运行。
2.7 储能系统
智轨电车选用磷酸铁锂电池作为车载储能系统能源载体,包括磷酸铁锂电池包、高压盒、电池管理系统及电池热管理系统,其基本拓扑如图9所示。该储能系统具有冗余切断功能,一旦一条支路发生故障,可以允许车辆降级运行回厂检修。
三编组智轨电车标准配备电量为236.7 kW·h。根据具体项目要求,可以选配其他储能方案;且随着电池等储能装备技术的发展,智轨电车将被提供更强的动力,具备更长续航里程和更好的运营适应性。
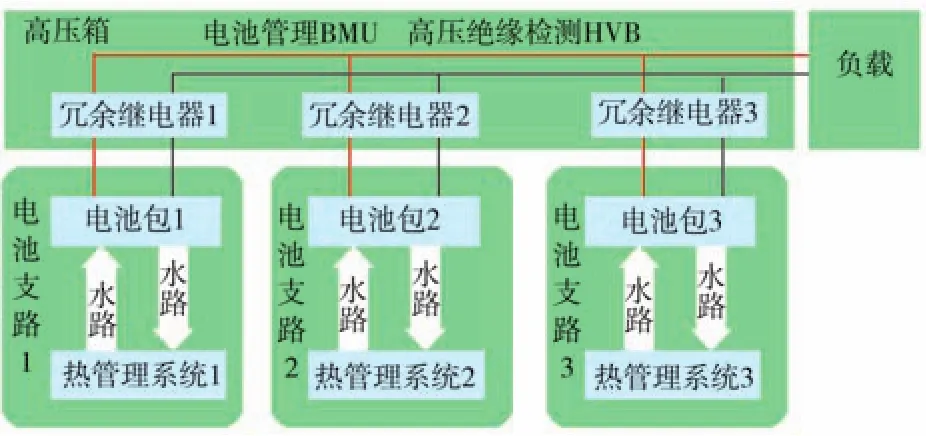
图9 智轨电车储能系统拓扑Fig.9 Topology of energy storage system of autonomous-rail rapid tram
2.8 车载信号系统
车载信号系统由车载信号主机、无线天线、车载显示器组成,采用以太网相互进行通信并构成热备冗余系统。智轨电车车载信号系统设备均设置在头车车厢中,其拓扑示意如图10所示。

图10 车载信号系统示意Fig.10 Schematic diagram of the on-board signal system
车载信号系统通过与车辆接口,获取差分GPS数据、车辆速度及车辆工况等信息,并结合GPS/BD数据及车载线路数据库信息等,实现车辆定位及测速;根据车辆位置,自动或由司机手动向道路交通信号控制系统申请信号优先或取消信号优先指令。
系统通过车载显示器与司乘人员进行人机交互,提供当前速度、当前限速、车辆位置、前方车站代号、设备工作状态、前方路口优先状态、站台门状态等信息辅助司机驾驶。
2.9 车载乘客信息系统与综合无线通信系统
智轨电车车载乘客信息系统(PIS)包括车载广播、车载乘客信息显示系统以及车载视频监控系统,如图11所示。在正常情况下,其可为乘客提供乘车须知、运行时刻表等实时的与行车相关信息;在火灾、设备故障等紧急情况下,可以提供及时的疏散提示;系统具有视频监视功能,可为运营人员提供及时的视频信息,对于乘客安全、便捷地乘车具有重要的意义。PIS系统与无线通信系统接口,接收中心调度员的语音调度命令。
智轨综合无线通信系统由车载子系统和地面子系统组成。地面子系统包括核心网、基站、网管系统、调度台、调度服务器、录音系统、网络交换机和路由器等;车载子系统由车载终端(TAU)、车载台、车载天线和合路器等设备组成,如图12所示。
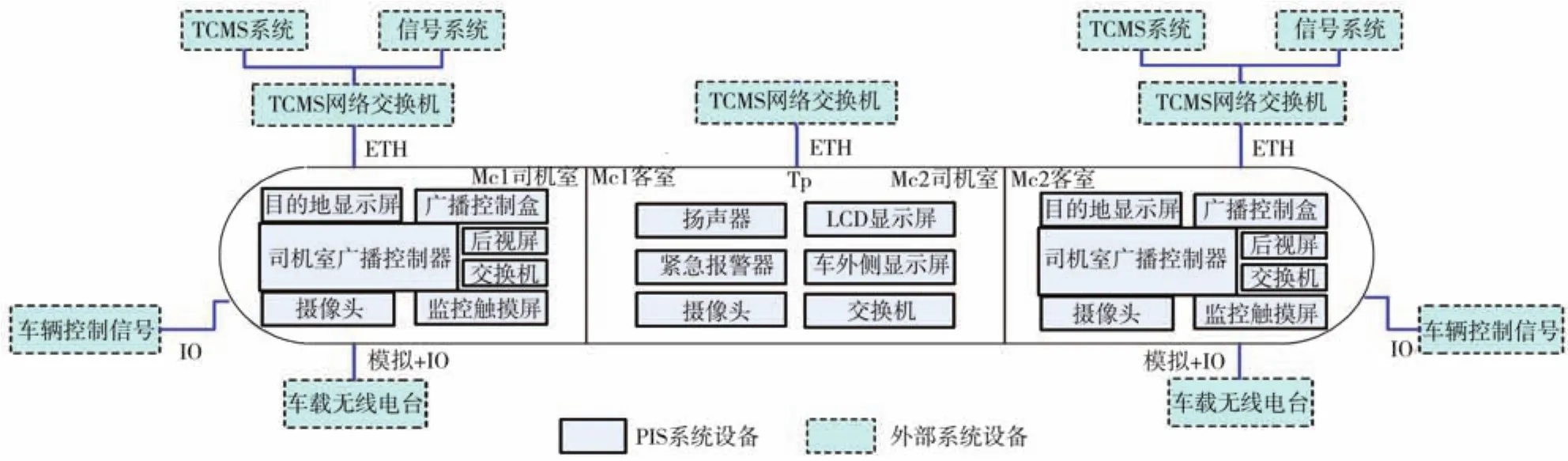
图11 车载乘客信息系统示意Fig.11 Schematic diagram of on-board PIS system

图12 综合无线系统车载子系统示意图Fig.12 Schematic diagram of on-board subsystem of integrated wireless communication system
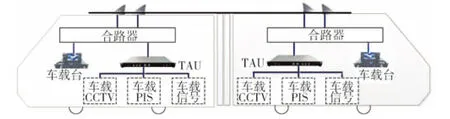
图12 综合无线系统车载子系统示意图Fig.12 Schematic diagram of on-board subsystem of integrated wireless communication system
智轨综合无线通信系统作为传输网络的延伸,提供地面与智轨电车之间的列车调度语音通信、列车监控数据传输、车载视频监控图像上传和PIS系统流媒体播放的综合承载无线传输通道。在目前已开通运营的ART项目中,江西永修的采用LTE方案,租用移动运营商既有网络,而四川宜宾的采用自建LTE-M方案。
2.10 网络化配电与数据采集系统
智轨电车低压配电与数据采集系统采用网络化、模块化的系统架构(图13),包括CAN/ETH网关、一级配电主模块、一级配电从模块等。智能低压配电模块具备通信接口,集数据采集、输出保护、控制等多种功能于一体,通过通信接口相互连接,可以实现实时数据采集、数据交互、数据处理、故障诊断及远程控制操作等多种功能。
各智能配电模块之间通过CAN总线通信线缆以及少量的母线电源线连接,减少了许多中间继电器电源控制的二次接线,减少了传统低压系统维护的工作量并降低了巡检的工作难度。所有配电逻辑控制采用报文形式程序控制,取代传统继电器硬线控制,大幅简化节点,便于后续功能拓展。
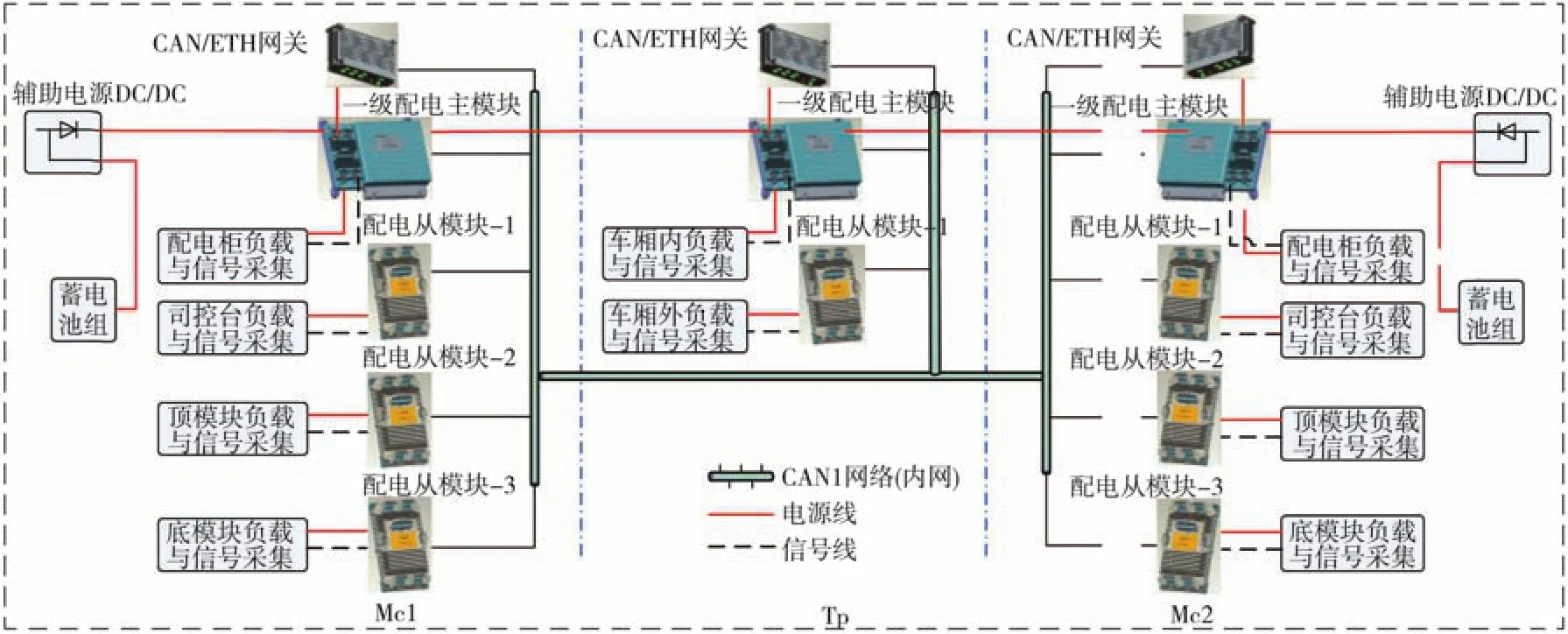
图13 网络化低压配电与数据采集系统拓扑Fig.13 Topology of low voltage power(network controlled) distribution and data collection system
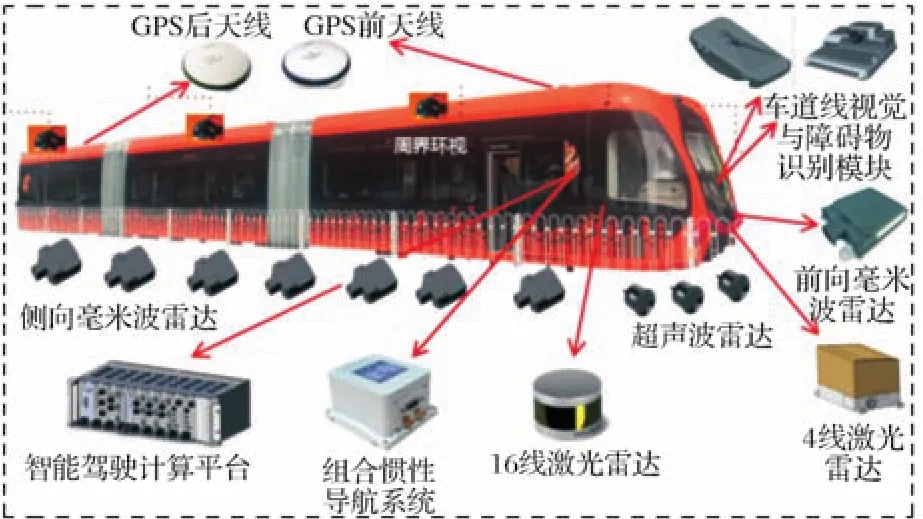
图14 多源环境感知系统示意Fig.14 Schematic diagram of multi-resource environment perception system
2.11 多源环境感知系统
智轨电车的多源环境感知系统(图14)由基于激光雷达的障碍物感知子系统、基于毫米波雷达的前侧向障碍物感知子系统以及基于多摄像头的360度环视子系统组成,为智轨电车的主动防护以及智能驾驶提供有效信息。
激光雷达感知子系统包含前后各2个16线激光雷达和1个4线激光雷达,其检测覆盖范围可达到车辆前方0.2~100 m范围,测距精度达到±0.3 cm,垂直视场角为±15°,更新频率为10 Hz。
毫米波雷达感知子系统包括前后各一个77 GHz毫米波雷达(能实现0.2~200 m范围的测距)与侧向18个24 GHz毫米波雷达(能实现0.2~30 m范围的测距)。
360度环视子系统使用8个安装在车厢顶部的鱼眼摄像头抓取车身周围图像,通过拼接技术得到智轨电车完整的周界全景图像。
通过这3种不同感知系统的相互配合,可为智轨电车主动安全提供有效保障,提高智轨电车安全运行系数。
2.12 自动循迹感知与控制系统
自动循迹系统通过图像识别传感器提取车道线特征并分类、跟踪,再通过反馈控制实时调节车辆航向、追踪期望路径[17]。智轨电车自动循迹系统包含感知子系统、控制子系统以及执行子系统,如图15所示。

图15 智轨电车自动循迹系统拓扑Fig.15 Topology of automatic path perception system for autonomous-rail rapid tram
智轨电车自动循迹控制系统可实时感知出的车辆与虚拟数字轨道的距离偏差、角度偏差和道路曲率等信息,结合车辆状态参数,在中央控制计算单元实时计算出方向盘转角指令,然后将指令输入给转向执行子系统,调整车辆航向。该系统能够保证在列车架构特殊、初始姿态随机的条件下头轴自主、精确地进入和跟踪数字轨道,如图16所示。
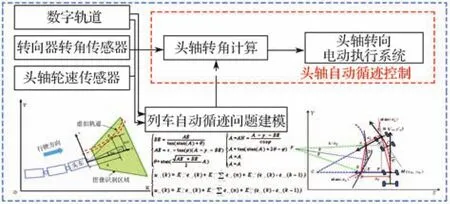
图16 智轨电车自动循迹控制原理Fig.16 Control theory of automatic path perception system for autonomous-rail rapid tram
2.13 自主导向轨迹跟随系统
自主导向轨迹跟随系统是智轨电车实现类轨道行驶的关键系统,其通过安装在车辆上的惯性传感器、角度传感器等多种传感装置采集车辆的姿态与坐标信息,实时计算并控制智轨电车各转向架的协同转向,使得车辆在前进方向上各转向架的行驶轨迹与头车第一个转向架的轨迹相吻合,如图17所示,通过构建虚拟轨道来提高智轨电车在没有物理轨道约束条件下的通过性能。
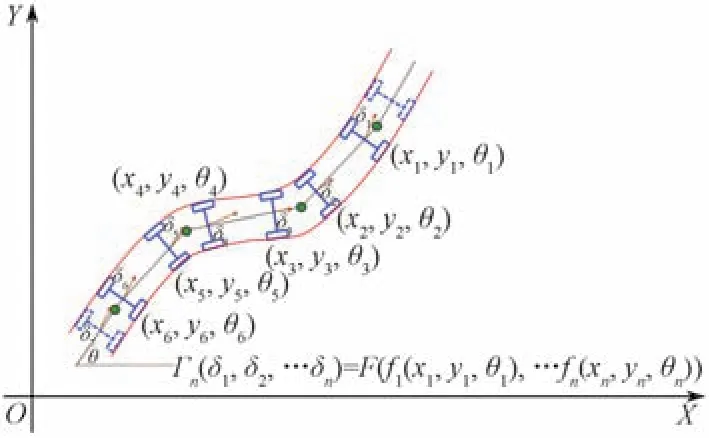
图17 轨迹跟随功能示意Fig.17 Schematic diagram of autonomous guidance function
自主导向轨迹跟随系统采用分布式集控架构,每节车辆每个转向架都安装有自主导向装置来协同控制各个转向架,实现轨迹跟随。自主导向轨迹跟随系统拓扑图如图18所示,其中WS1~WS6为自主导向单元,分布在每节车厢的两个转向架上来完成转向任务。列车具有双向行驶功能,当第一节车厢为行驶方向时,WS1不工作,其他的每一个转向单元均按照控制算法所给指令完成各自的转向任务。

图18 智轨电车自主导向轨迹跟随系统拓扑Fig.18 Topology of autonomous guidance system for autonomous-rail rapid tram
自主导向单元包括电控部分和液压部分,负责每节车厢前后两个转向架的主动转向,从而实现转向架对中回零、转向角度限位控制、转向架角度锁定等功能,并能将转向架的实时状态(包括转速、转角、液压压力、流量等)信息通过控制器上传至车载网络与监测系统。
整个自主导向轨迹跟随控制系统按照功能安全SIL4等级进行架构设计和功能设计。该控制器已通过功能安全认证。
3 地面机电系统
智轨地面机电系统由充电、通信、信号、售检票(AFC)、站台门等系统组成,其构架借鉴了轨道交通的弱电系统模式[18],并结合ART的运营控制、无轨无网等特性对各个子系统进行了智能化、轻量化的适配和优化,使包含智轨电车的各个子系统有机融合,确保整个运输系统的安全、高效、智能。智轨地面机电系统总体拓扑如图19所示。
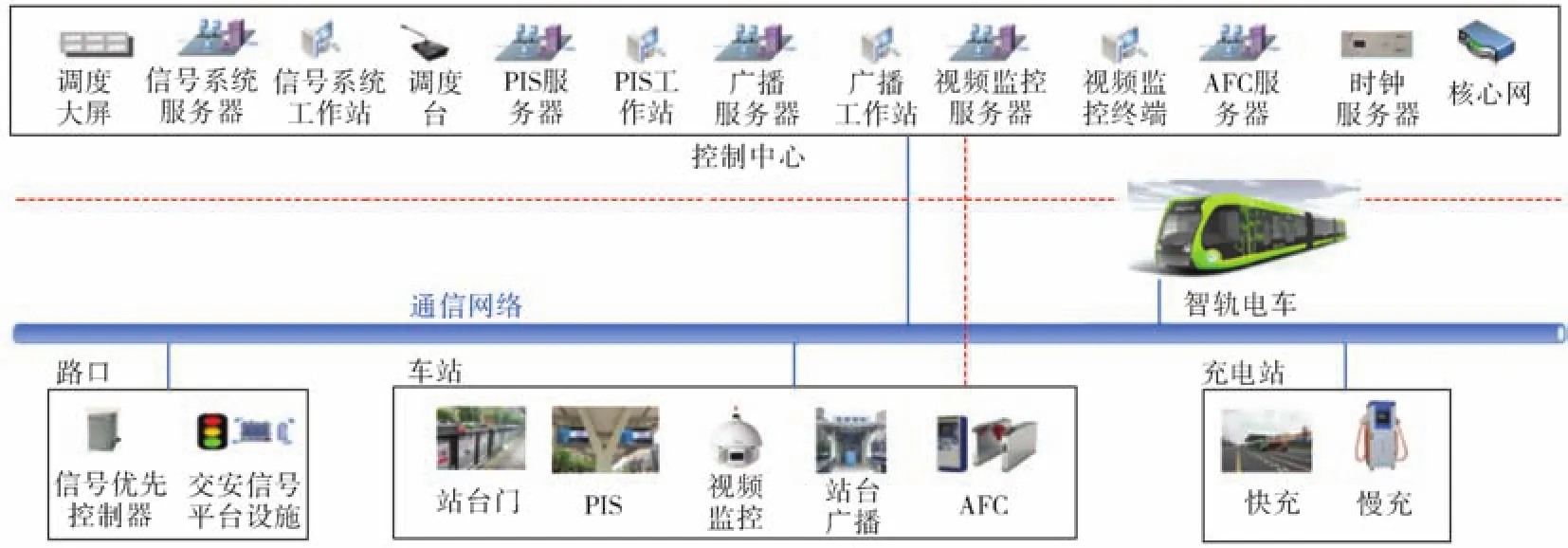
图19 智轨地面机电系统拓扑Fig.19 Topology of electromechanical system in ground for ART
3.1 充电系统
智轨充电系统可以根据具体线路要求配置充电方式,如首末站定点快充、走行进站滑充、架空线充电以及无线充电等方式。对于20 km以内的市内交通运营线路,从车载储能系统及地面供电系统的性能、成本等方面考虑,采用首末站定点快充是目前最经济的充电方式[19]。
首末站定点快充系统由一体化预装式智能充电站、双极性充电轨、地面定位识别装置及无线通信系统构成。一体化预装式智能充电站配备有极性转换装置,可在升弓后检测车辆受电弓极性并自动配置双极性充电轨上的充电极性。智能充电站一旦检测到智轨电车位于正确的充电位置,便通过由无线WiFi短传通信链路与LTE综合无线通信链路构成冗余架构的无线通信系统,与智轨电车实时交互充电信息并实现自动充电。
一体化预装式智能充电站采用集装箱形式,其将10 kV高压开关柜、低压配电柜、变压器、整流器、斩波器、滤波器以及控制装置集成在一个15 m×3 m×3 m集装箱中。单个集装箱可支持两个充电位;安装时,现场只需修建地基即可。
智轨充电系统一般由智轨线路首末站或车辆段临近变电站引入10 kV电源给智能充电站供电,单个充电位的最大充电功率超过750 kW。
由于ART充电策略为5~10 min脉冲式充电,地面充电站配备能量缓冲系统即可以直接将380 V市电引入,进一步节约了系统成本,并减少了充电对电网的冲击。
地面快速充电系统通过有线传输系统接入运营控制中心,快充系统内设备的状态信息可被实时采集并被反馈至运控中心,以便运维人员监控管理。该快充系统总体拓扑如图20所示。

图20 智轨定点快充系统拓扑Fig. 20 Topology of position fast charging system for ART
3.2 通信系统
通信系统包括综合无线通信系统、有线传输系统、乘客信息系统(PIS)、广播系统(PA)、视频监控系统(CCTV)及时钟系统等,为ART提供一套即时可靠、支持数据传输和状态监控的通道及运营管理服务。
ART的线路基建要求较为简单,只有站台周边及路口的施工点。为保持智轨“无轨无网”设置带来的基建量小、运营灵活性的特性,应对地面的复杂应用环境,根据线路的具体情况及功能需求,智轨地面机电系统多采用基础设施共享的方案。如:租用本地运营商的有线光纤(裸纤)及无线网络(4G)的方案;而在形成ART线网的城市,无线通信则采用自建LTE-M专网的方案,且铁塔可与通信运营商共用,降低建设成本,并且后续只需通过设备的硬件升级,即可平滑过渡到5G的网络制式。智轨综合无线通信系统拓扑如图21所示。
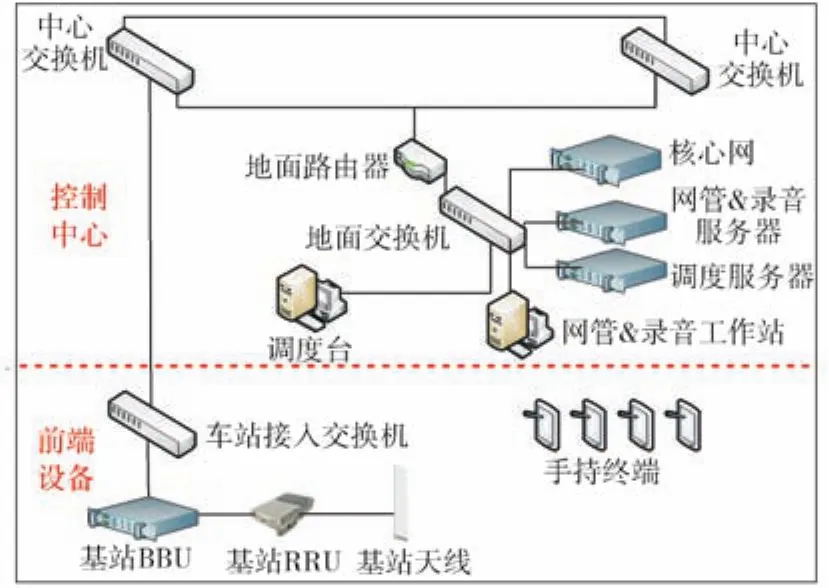
图21 ART综合无线通信系统架构Fig.21 Integrated wireless communication system of ART
ART的有线传输、PIS、PA、CCTV、EHP等机电子系统则参照了传统的轨道交通模式并结合ART的特性进行了相应的集成化、轻量化设计,以提升系统的性能和效率。
3.3 地面信号系统
智轨地面信号系统包含调度管理系统、路口信号优先控制系统等。调度管理系统能够通过与车载信号系统的实时通信,监测所有线路车辆运行位置及状态信息,并进行运营计划的编辑、发布及调整等,以实现对ART的运营调度管理职能。路口信号优先控制系统通过智轨电车与道路交通信号控制机之间的双向实时通信,实现列车在路口处的优先通行。信号系统整体构架如图22所示。
调度管理系统(图23)通过有线传输系统及综合无线传输系统接收车载信号系统上传的数据,完成列车的全线监视、实时的运行图显示、设备工作状态监视、各种运营统计报表展示、故障检测及报警、系统运行及操作日志记录、时钟同步等功能,并可将调度命令下发至车载信号系统,以实现列车运行的管理与监视。
路口信号优先控制系统(图24)包括路口信号优先控制器和车地短程无线通信设备(地面设备在每个路口对应该处路口信号优先控制器安装,车载设备安装在车上)。车地短程无线通信设备采用无线电台或Zigbee等设备。路口信号优先控制器通过车地短程无线通信设备与车载信号系统通信,可接收列车发送的请求/取消优先信息;路口信号优先控制器可与道路交通信号控制机接口,由道路交通信号控制机实现列车在路口处的优先通行。

图22 ART信号系统构架Fig.22 Schematic of signal system for ART
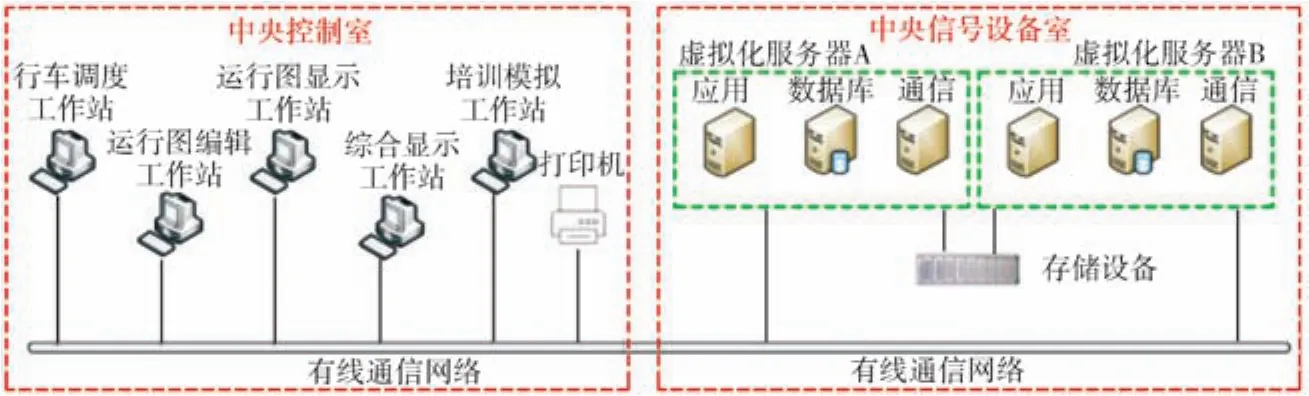
图23 调度管理系统结构示意Fig.23 Schematic diagram of dispatching system

图24 智轨信号优先系统Fig.24 Schematic diagram of signal priority system for ART
3.4 售检票系统
传统的地铁售检票系统存在建设成本高、资源利用率低、后期维护工作困难等问题[20]。智轨售检票系统(AFC)采用云计算技术构建系统的整体架构、物理拓扑结构和软件体系架构,降低了系统投资,提高了资源利用率,实现了AFC系统低碳运营、绿色运营及安全运营,其系统拓扑如图25所示。
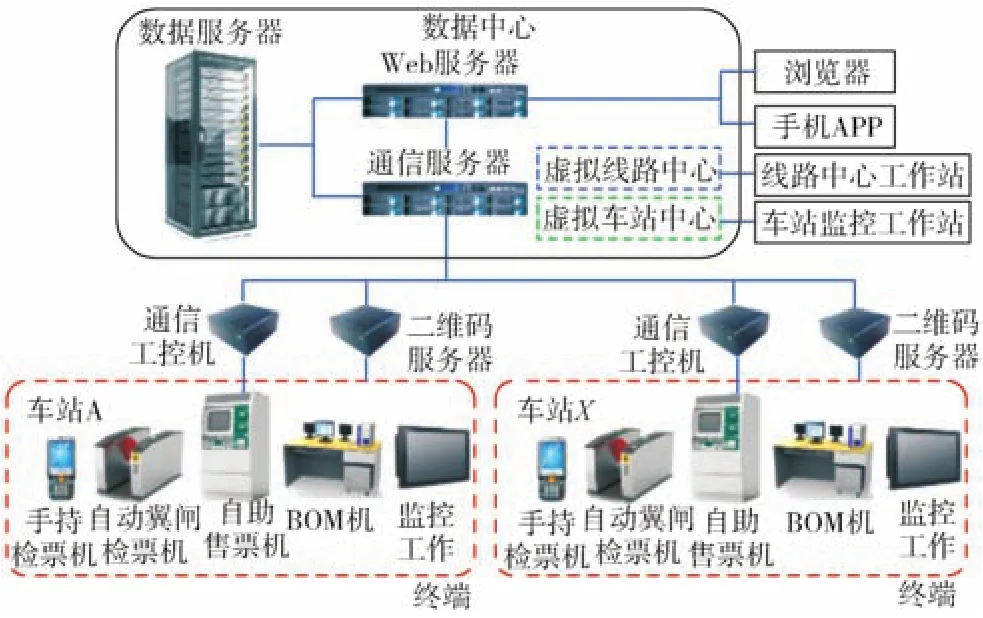
图25 售检票系统拓扑Fig.25 Topology of AFC system
智轨售检票系统采用扁平化方案,在传统的多层结构基础上省去中间环节,将功能向两端发展,增强数据中心的数据处理能力、可靠性、稳定性,增强设备端的自服务能力。
3.5 站台门系统
智轨站台门系统(图26)由门体机械系统、电气控制系统和监控系统3部分构成。作为站台共区域与智轨电车间的可控通道,站台门系统目前具备3级控制能力,即站服人员手动操作下的就地控制、智轨电车自动驾驶下的车载信号控制和控制中心操作下的调度管理系统控制,以确保站台门在不同工况下的安全操作。同时站台门系统通过有线传输系统与调度管理系统通信,并结合系统内部现场总线及硬线,将每侧站台安全门单元中所有设备的状态及故障信息传送到站台安全门监控系统后再统一上传至调度管理系统,实现各站台的可视化监控。
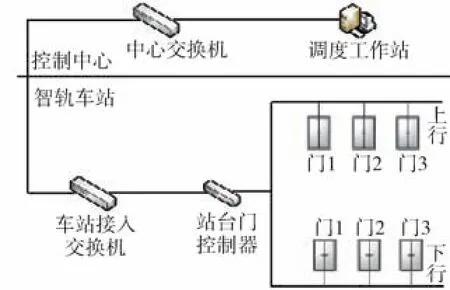
图26 站台门系统拓扑Fig. 26 Topology of PSD system
3.6 综合运营一体化平台
针对ART轻量化、集成化和低成本化的特点,搭建了一套综合运营一体化平台(图27),在运营管理模式、软硬件资源配置等方面高度集成和统一,通过统一的用户界面和人机接口来集成各个子系统功能,大大简化工作人员的操作,提高运营调度的效率。
一体化平台通过设置前置处理机(FEP)的方式与前端的各个子系统建立双向数据通信,并通过数据接口调用/执行各子系统的业务模块;此外,FEP还将获取各子系统的相关历史数据并存储到实时数据库(relational database,RDB)和历史数据库中,以作为大数据分析的数据源。
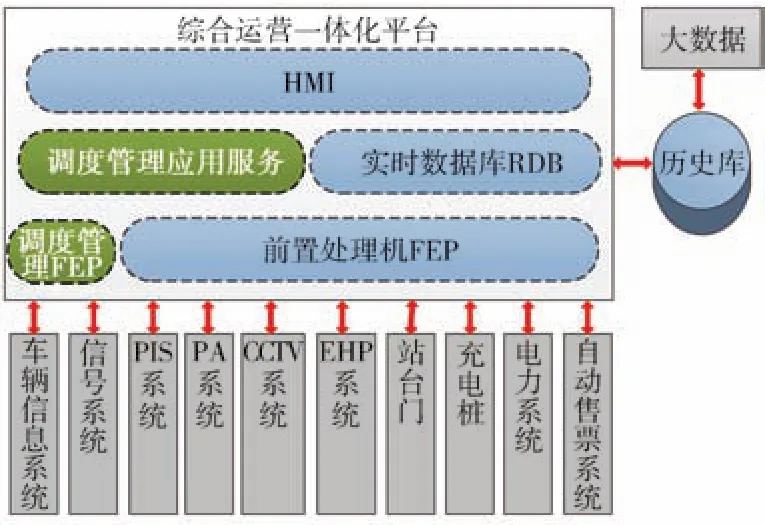
图27 综合运营一体化平台示意Fig. 27 Schematic diagram of integrated operation platform
一体化平台还集成了各个子系统原有的核心功能并进行了HMI的统一,原有控制中心调度大厅的各个专业工位的操作都被集成在一个统一的平台界面上完成,极大地方便了用户操作和运营管理。系统界面如图28所示。
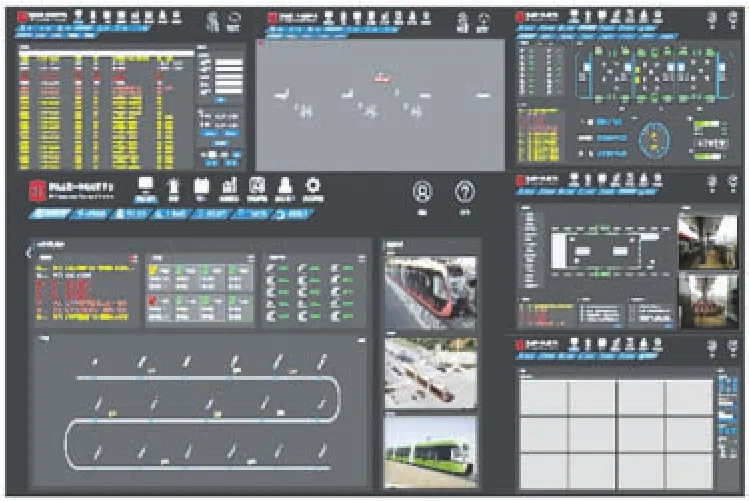
图28 综合运营一体化平台界面Fig. 28 Interface of integrated operation platform
4 基础设施
4.1 路基路面
根据智轨电车载荷及行车特征,从现有道路智轨电车运行衰变规律、智轨道面设计方法、智轨道面维养方法3个方面对智轨道路设计规范进行了研究。通过分析智轨电车荷载作用模式、各等级路面力学响应情况(图29),评估现有道路运行智轨可行性,结果表明,智轨电车可在路基路面结构达到CJJ 37—2016《城市道路工程设计规范》标准要求的次干路及以上等级道路上通行。在进行ART整体工程设计时,应充分利用符合智轨电车通行条件的城市道路。拟定的智轨线路中若有不符合智轨电车通行条件、涉及改建或新建道路的,应参考标准CJJ37—2016或者JTG D50《公路沥青路面设计规范》和JTG D40《公路水泥混凝土路面设计规范》进行设计,并考虑如下要求:
(1)路面结构应选用抗重载、抗剪切能力强的材料,并注重层间粘结。
(2)区间段的路面结构宜采用沥青混凝土路面结构,车站处的路面结构宜采用水泥混凝土路面结构,全线均应作抗车辙等增强处理。车站和路口处采用沥青混凝土路面结构时,抗车辙等的处理宜进一步加强,且长度应包含车辆加减速及停车段。

图29 智轨电车胶轮作用下的路面响应Fig. 29 Road surface response to rubber-tyre pressure of autonomous-rail rapid tram
4.2 线路型式
智轨电车线路敷设方式,主要分为路中式、路侧式和双向同侧式3种[21],其对比如表4所示。
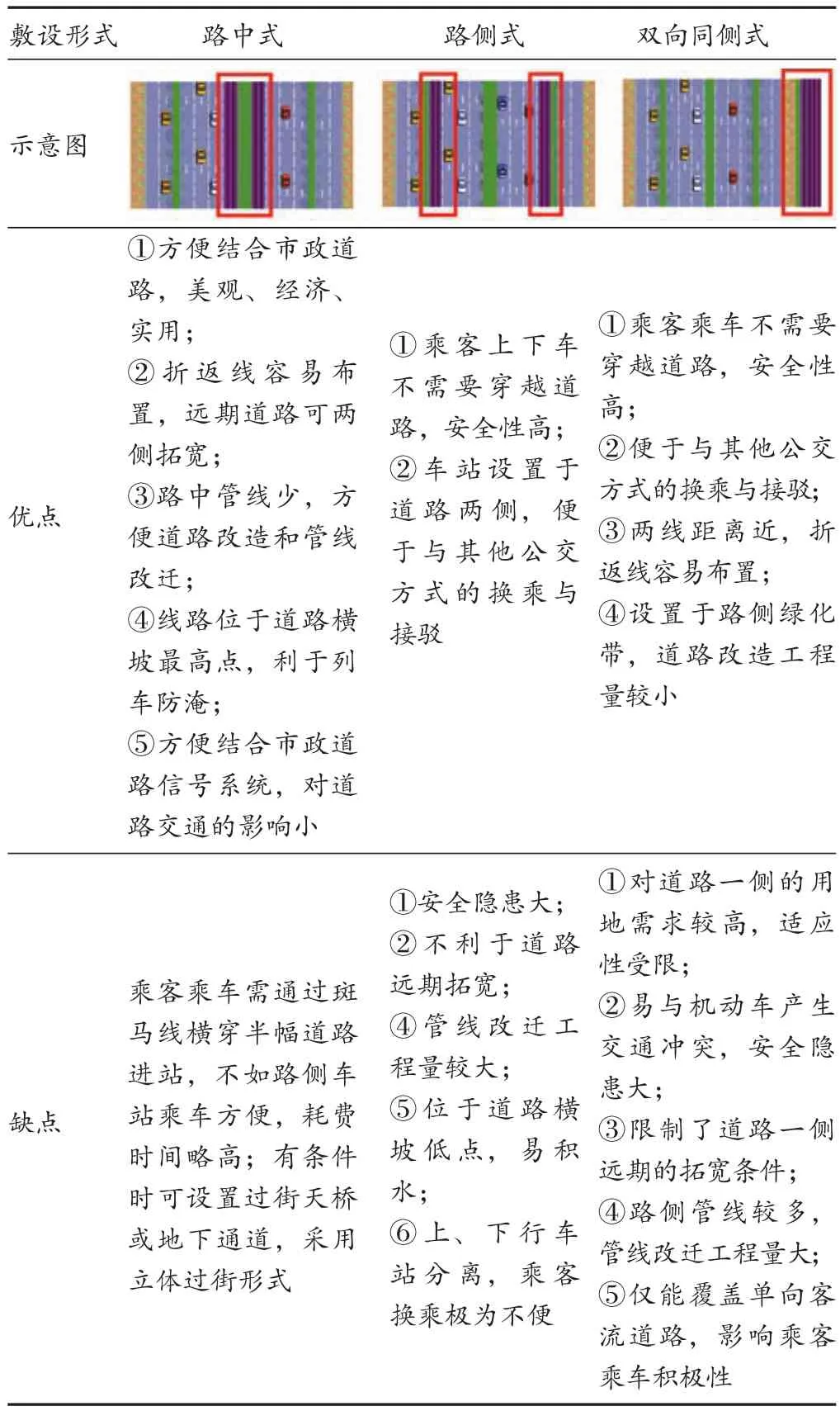
表4 线路敷设方式优缺点对比Tab.4 Comparison of relative merits for ART line laying
智轨电车可以充分借用原有线路,运行在地面、高架、隧道等不同形式的道路上。在原有路口可进行立交化处理,以提升运行效率及安全:(1)在共享路权交叉口,针对相交、中低等级道路,改为右进右出的组织形式;(2)在专用路权交叉口、交通繁忙及条件允许地段,智轨电车采用上跨或下穿通过形式,如图30所示。
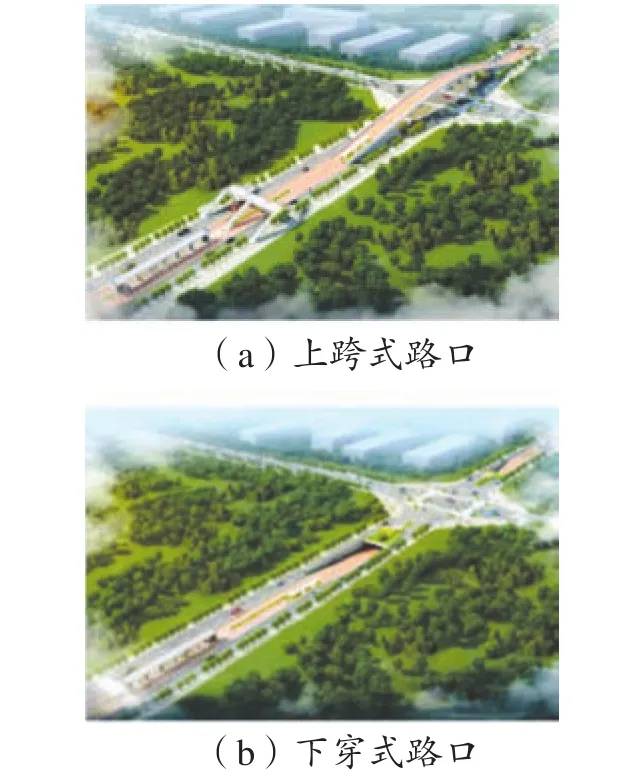
图30 智轨线路路口采用上跨或下穿通过形式示意Fig. 30 Schematic diagram of over crossing or underpassing through the intersection for autonomous-rail rapid tram
4.3 车站
智轨电车的车站分为岛式车站和侧式车站两种形式,其中侧式站台车站又分为标准侧式车站和错位侧式车站。岛式车站一般被设置于道路条件较好的路段,乘客需利用人行天桥过街或斑马线过街。标准侧式车站一般被设置于道路条件较差、站间距较大的地段,需通过斑马线、人行天桥或地下过道连接两站台及道路两侧。错位侧式车站一般被设置于道路条件较好的道路路口处,需通过斑马线、人行天桥或地下过道连接两站台及道路两侧。
作为路面交通,智轨电车大部分行车路段为地面运行线路,易与公交等现有交通方式融合,通过合理选择路由和站点能充分吸聚客流,并可通过合理设置与其他交通方式的接驳点来实现与步行、常规公交、地铁等交通方式的接驳,如图31所示。
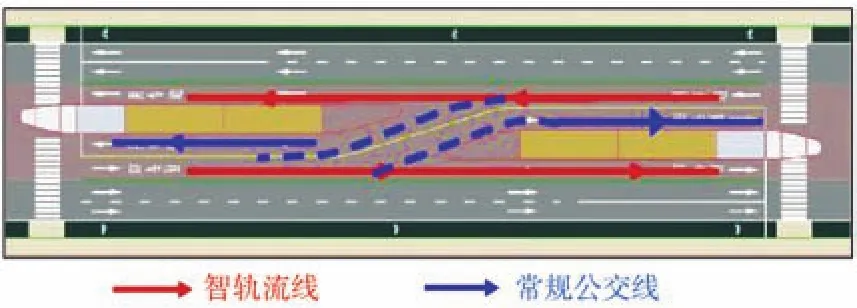
图31 智轨与常规公交共站换乘示意Fig. 31 Schematic diagram of transfer station shared by autonomous-rail rapid tram and buses
4.4 检修基地
智轨电车的检修基地不仅负责全部配属车辆的运营、停放、洗刷消毒、列检、周月检、换轮、定临修、大架修、设备机具维护、救援等保养工作,而且还设置有培训中心,负责全网职工入职培训及再教育。配备的专业作业设备一般为救援拖车、叉车、天车(10 t+10 t)、托盘式推车、轮胎升降车和电动举升车等。
由于智轨电车转弯半径小且检修维护相对比较简单,ART的检修基地规模相对较小。图32为一个6列位三编组智轨电车的检修基地,占地面积约为4 500 m2。
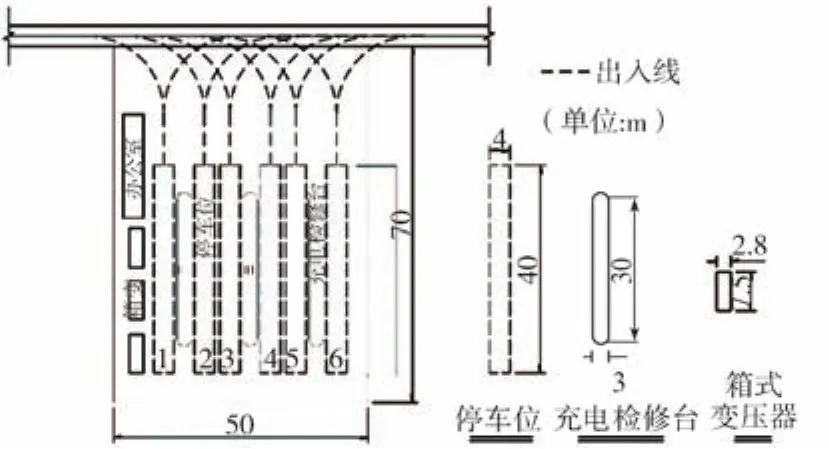
图32 6列位三编组智轨电车检修基地示意Fig.32 Schematic diagram of the depot with 6 parking spaces for 3-module autonomous-rail rapid tram
5 应用现状
从2017年发布以来,ART已在多个城市得到了应用,如在湖南省株洲市已经建成了3 km长的示范线——智轨A1线,在江西省永修县建成了4 km长的示范线。2019年12月全球首条ART运营线——宜宾智轨T1线在四川省宜宾市投入商业运营。
宜宾市智轨交通T1线(图33)主线全长约16.1 km,线路起自成贵宜宾西站,止于企业服务中心站,共设站14 座,均为地面站,平均站间距约 1.1 km,其中地面线约 15.7 km,高架线路长约0.4 km;支线全长约 1.6 km,设站2座,均为地面站,站间距约1.2 km,线路起自主线长翠路站,止于峥嵘路南侧的白酒学院附近,串联起临港大学城与T1线主线。

图33 宜宾智轨T1线线路概况Fig. 33 Yibin ART T1 line pro fi le
宜宾市智轨交通T1线过长江大桥,穿越老城区,覆盖了城市发展主要客流走廊,从2019年3月29日至12月31日,累计试运行278天,共运行智轨列车13 910对,累计运行31.28万列公里。全线开通后,T1线路设置车辆最高运行速度55 km/h,正线全程耗时约40 min,平均旅行速度为24.8 km/h左右,相较宜宾传统公交线路的13 km/h的旅行速度,全程耗时节约25 min;列车运行图(时刻表)兑现率98.8%、发车正点率98.3%。ART的大运量、舒适、准时、快速等特点已得到广大市民广泛认可。该线路开通试运营以来,平均日客流量达到1.3万人/天。
6 结语
ART属于以地面运行为主的中低运量城市交通新制式,其已呈现以下特点:
(1)系统简洁、成本低。因无需铺设钢轨,对道路破坏性小;整车质量轻,单轴承载低,借用既有路面,无需对桥梁进行结构加强;同时可借助现有的道路交通管理系统,使运输道路上的信号系统无需大规模改造。
(2)基础建设周期短。以绘制地面标志线代替钢轨铺设,施工期短;可借用城市现有道路运营,缩短了道路规划、拆迁和建设周期,预计从项目立项到全部运力上线仅需12个月。
(3)运营灵活、适应性强。其无需铺设钢轨与供电线网,可采用共享路权方式,运营线路布置灵活;发生交通事故或严重拥堵时,可以临时授权绕道行驶,调度灵活;转弯半径小,双向行驶,可以在老城区相对狭窄的道路运行。
为适应我国广泛的城市特征和交通需求,智能轨道快运系统提供了新的解决方案。后续我们将通过融合边缘计算、云计算、5G通信、智能传感等新技术,在全天候智能驾驶、无线编队控制等方面持续升级智轨电车及其机电系统技术,建立其规划、建设、运营方面的标准体系;规范运营管理模式,探索投资建设及盈利模式,深入研究交通规划及融合方案,最终构筑起以ART为主体的地面综合交通体系。