PSO在PID参数整定控制系统中的影响因素分析
2020-08-01于明星舒丹丹
于明星,杨 丽,舒丹丹,许 钟
(1.朝阳师范高等专科学校 信息工程系,辽宁 朝阳 122000;2.沈阳理工大学 装备工程学院,沈阳 110159;3.中国三峡新能源(集团)股份有限公司 三峡新能源朝阳发电有限公司,辽宁 朝阳 122000)
PID(Proportional Integral Derivative)控制是发展较早的工业控制策略,在工程上得到广泛应用[1-2]。传统PID控制系统主要通过经验进行参数整定,显然该方法具有较高的主观性,难以取得最优控制。近些年,智能算法在PID控制上的应用引起诸多学者关注,如模糊控制[3-4]、神经网络控制[5]、遗传控制[6]等。智能算法发展取得了理想的控制效果[7],但算法存在着复杂编码及计算时间长的不足。
粒子群优化算法(particle swarm optimization,PSO)是一种快速、有效、简洁的智能优化算法[8]。Reynolds于1987年提出一种模拟鸟类飞行运动的粒子群模型[9],该模型个体行为与相邻个体行为具有相关性,每只鸟向各个方向飞行,个体自发形成小群落,小群落再组成大群落,最终所有鸟具有相同的飞行状态。Kennedy在鸟群模型基础上,提出粒子群优化智能算法[10],给出加速因子的最优设置参数。Ozcan等 发现PSO能实现参数的自适应调整[11],获得运动粒子轨迹的多维空间运动方程。Clerc等在 Ozcan的基础上,对原有PSO算法进行改进,增加了粒子的寻优能力[12]。Solis等人对随机优化算法的满足条件进行说明[13]。Van den Bergh对PSO算法参数值与收敛性[14]的关系进行了研究。
通过以上分析,发现PSO算法在PID控制理论研究主要集中在收敛速度、收敛程度、收敛条件上,对于相关因素对整定后的参数影响分析较少涉及。本文在现有研究成果的基础上,给出PSO算法的数学模型,通过Simulink实现交互计算,分析了权重系数、加速因子、速度限幅对参数整定的影响,通过三元平衡图分析了各参数整定与系统性能的关系。
1 粒子群算法数学模型
1.1 基本原理
设f(X)为目标函数,搜索空间维度为n,粒子数i的最优位置运动方程为
(1)
式中:t为粒子的进化代数;Xi为粒子在n维搜索空间中的瞬时位置向量矩阵;pbesti为粒子经历过的个体最优位置。
设总粒子数为N,则粒子全局最优位置
gbest(t)=min{f(pbest1(t)),f(pbest2(t)),…,f(pbestN(t))}
(2)
速度瞬态变化方程
vij(t+1)=vij(t)+c1r1(pbestij(t)-xiji(t))+c2r2(pbestij(t)-xiji(t))=vij(t)+Partcog+Partsoc
(3)
式中:j为粒子所在维度;vij(t)为粒子运行速度分量,也称粒子先进速度;xij(t)为粒子位置分量;c1、c2为加速因子,c1调节粒子个体最优的飞行步长,c2调节粒子全局最优的飞行步长;r1、r2为随机数,数值范围取[0,1];Partcog表示粒子认知能力部分;Partsoc表示粒子社会信息共享及相互作用部分。
位置瞬态变化方程为
xij(t+1)=vij(t)+vij(t+1)
(4)
全局最优位置点吸引全部粒子个体向全局最优位置运动;同时,群体个体最优保持多区域探索,摆脱算法陷入局部最优。
1.2 模型分析
若式(3)中的c2=0时,速度瞬态变化方程就简化为
vij(t+1)=vij(t)+Partsoc
(5)
式(4)和式(5)构成粒子群认知模型,在该模型中粒子依据个体飞行能力及认知经验进行最优位置的搜寻,缺乏粒子间的相互信息交流而导致搜索能力较低。
若式(3)中的c1=0时,速度瞬态变化方程就简化为
vij(t+1)=vij(t)+Partcog
(6)
式(4)和式(6)构成粒子群社会模型,在该模型中粒子利用粒子群间相互作用搜索,收敛速度快,但缺乏粒子个体的认识能力而导致进入局部最优。
若式(3)中的c1≠0和c2≠0,式(3)、式(4)就构成了完全模型,则PSO中的粒子既有自身认知经验及群体的社会交流经验,具有更好的寻优能力。寻优过程要求粒子本身具有记忆功能,考虑以前速度的影响,否则粒子会做效率较低的无规则运动。
1.3 参数分析
为适应算法进化要求,引入惯性权重系数ω,ω的引入可以自适应权衡全局搜索及局部搜索,式(3)为
vij(t+1)=ωvij(t)+Partcog+Partsoc
(7)
权重系数对照功能[15]如表1所示。
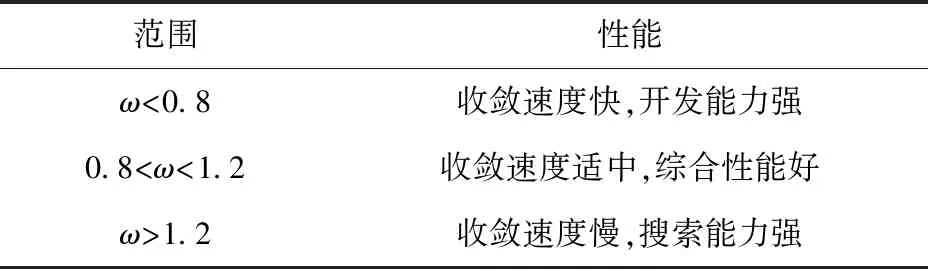
表1 权重系数功能表
加速因子调节式(7)中Partcog和Partsoc在粒子飞行速度的比重。合理选择加速因子能够快速、准确地发现最优解。加速因子和迭代次数对控制系统最优解具有较大的影响,也是本文着重分析的影响因素。
2 参数整定理论基础
2.1 模型分析
PID控制器[16]具有比例、积分、微分基本控制规律的特点,其输入—输出方程为
(8)
式中:u(t)为输出信号;e(t)为误差信号;KP为比例调整系数;KI为积分调整系数;KD为微分调整系数。
若将粒子群算法应用于PID控制器,需将粒子和适应值分别与控制器参数(KP、KI、KD)和性能指标相对应。
2.2 优化准则
常用的误差准则有ISE、IAE、ITAE、ISTE。本文选用目前最优控制理论中应用较广的一种误差准则时间与绝对误差积分乘积准则(integrated time and absolute error,ITAE),其定义形式为
(9)
2.3 被控对象
选定相角裕度为负的不稳定待整定控制系统[16],其开环传递函数为
(10)
式中:s为复域内的复变因子。
2.4 算法实现过程
Simulink模型如图1所示,选用的结构器件如表2所示
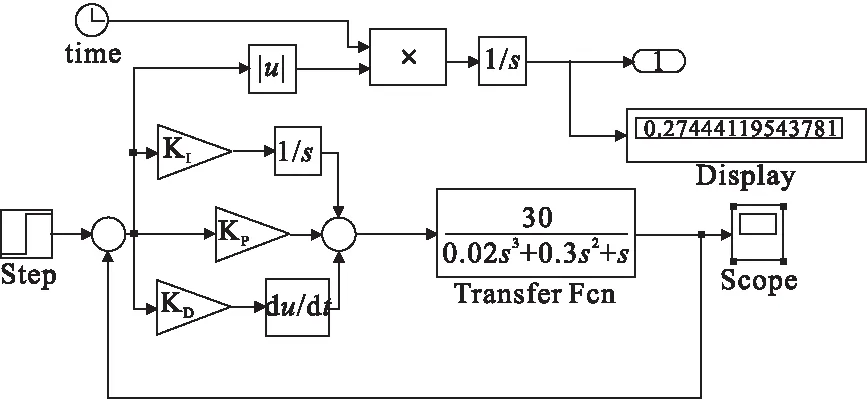
图1 PID控制系统模型
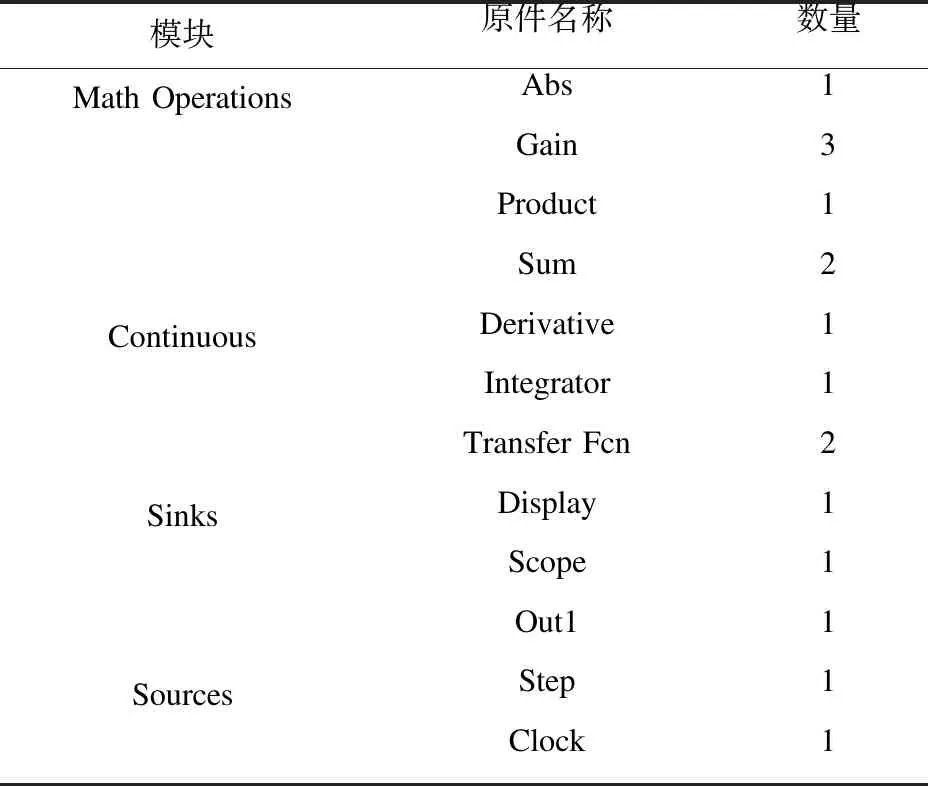
表2 Simulink器件使用
PSO优化PID参数过程如图2所示,该过程通过编写m文件程序将实时仿真工具Simulink与PSO进行交互寻优。PSO产生的粒子依次赋值给控制器参数,实时运行的Simulink计算出对应的性能指标[17],该性能指标传递给PSO与粒子适应值比对,判断算法是否满足终止条件,从而得出最优解。
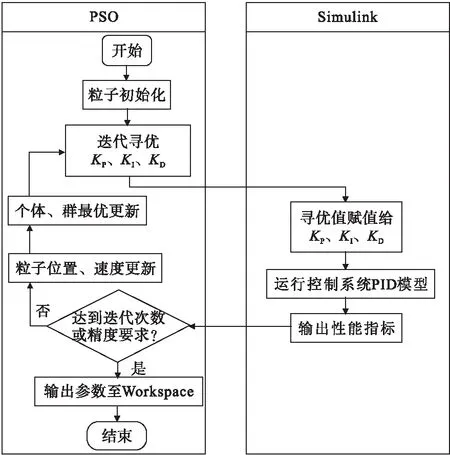
图2 PSO优化过程
3 仿真结果分析
由于算法的计算时间较长,本文在收敛速度较快的范围内均匀取值,仿真结果如图3所示。
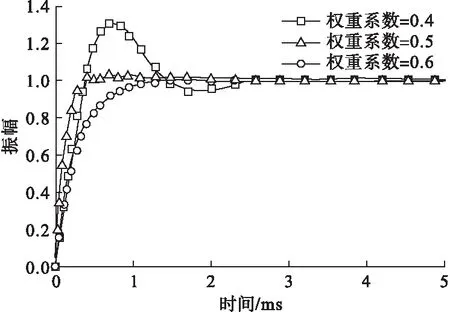
图3 不同权重系数下的阶跃响应曲线
由图3可以看出,权重系数ω影响全局搜索能力,随着系数的变大,终止的性能指标要求变高,超调量降低,响应时间变快。性能参数对比如表3所示。
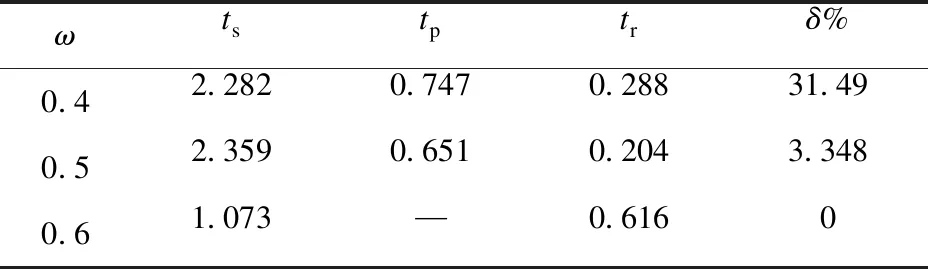
表3 不同ω的性能计算参数
文献[14]提到,当c1=c2=2时,加速因子协调一致设置,能准确寻找到最优解。文献[18]通过仿真实验发现:加速因子c1从2.5线性减少至0.5,加速因子c2从0.5线性增加2.5,能获得最优解。本文综合以上学者成果,采用如下六种方案对加速因子进行分析,计算结果如表4所示,响应曲线如图4所示。
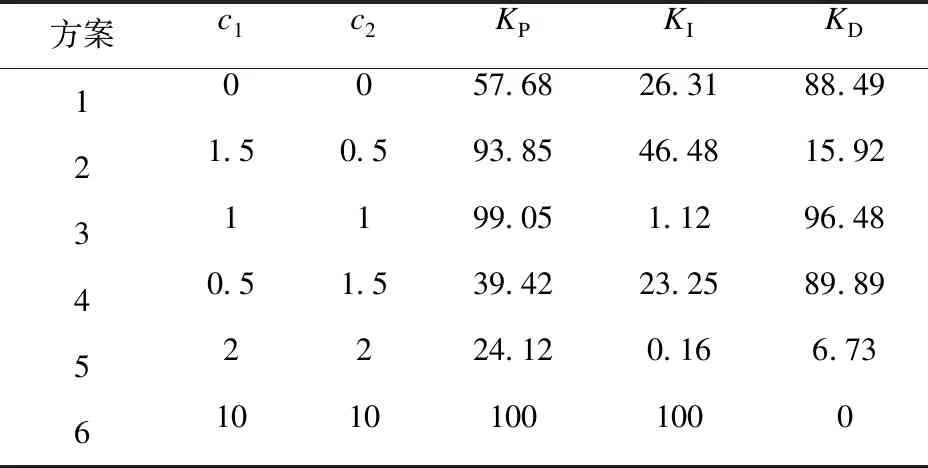
表4 不同加速因子的PID计算结果
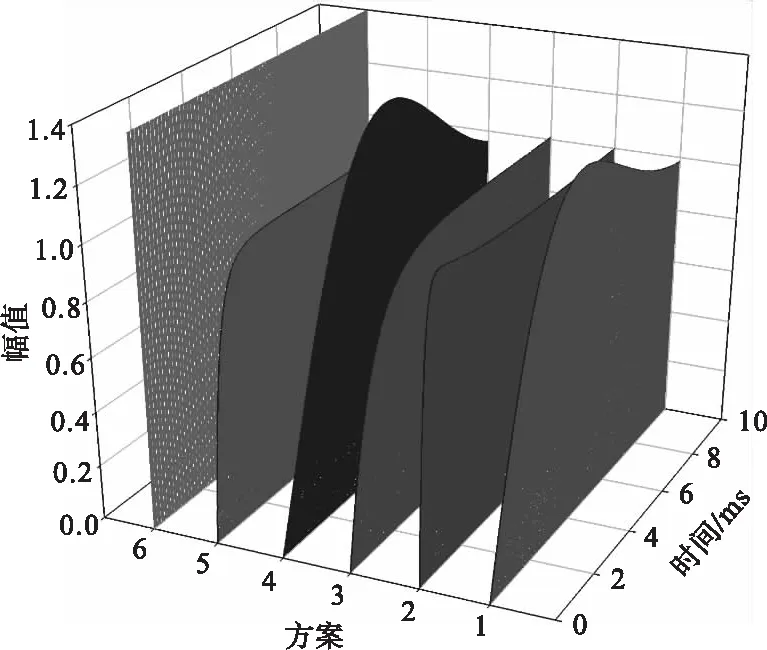
图4 加速因子三维水流响应特征
从图4可以看出,方案6的加速因子较大,粒子群错过最优解,致使系统发散,算法不收敛。方案5的超调量最小,性能最佳,方案1和方案4的调节时间较长,方案2和方案3性能参数适中。
文献[19]提出通过限制粒子最大飞行速度的方式调整搜索步幅。在此基础上,本文以表5的5种限定策略进行分析。
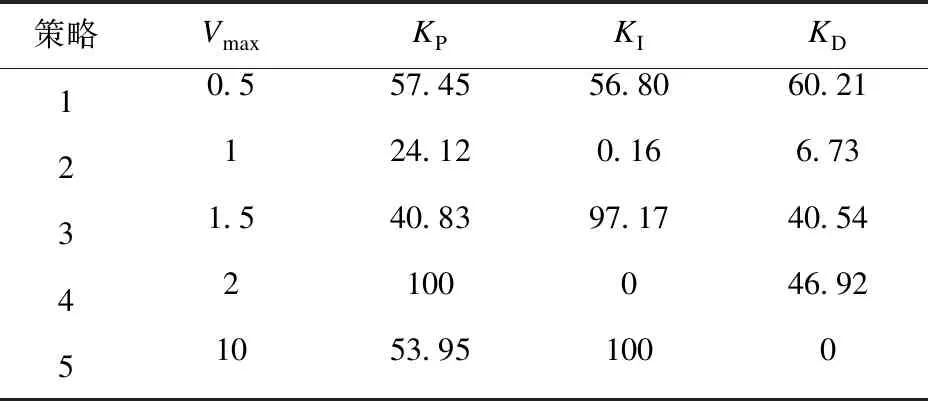
表5 最大限幅整定方案设计
图5为不同限幅值下的三维水流响应特征。
从图5中可知,策略1的粒子速度太小,陷入局部最优,响应调节时间长;策略2的粒子飞行步幅限制适当,性能较好;策略3的飞行步幅稍大,超调量高。策略4的粒子速度更大,调节时间稍长;策略5的粒子速度过大,粒子飞出最优区域,使得系统发散。

图5 限幅三维水流响应特征
图6为所有计算值的三元参数平衡。
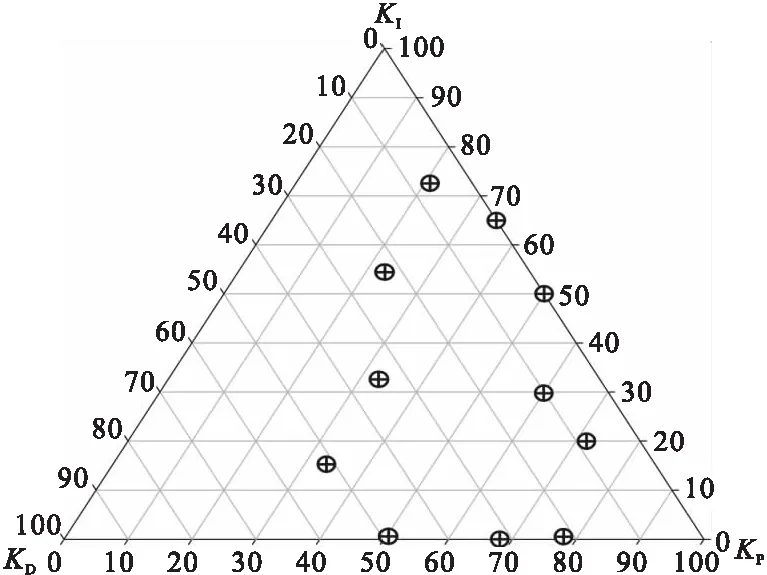
图6 三元参数整定平衡
从图6中发现,越靠近三元图的右下角,系统的控制精度越高,KP对系统的稳态误差影响较大。越靠近顶角,系统越不稳定,响应曲线呈发散状,KI对系统的稳定性影响较大。然而,没有离左下角近的点,这是因为KD越大,系统的鲁棒性越差的原因。也能说明KD在适当范围内变化,对系统的稳态过程没有影响。对图6的右下角最优点的整定值与文献[16]串联滞后校正法(Series Lag Correction,SLC)及文献[20]临界比例度法(Critical Proportion Method,CPM)进行对比。
图7为三种方法的阶跃响应曲线。
从图7中可以看出PSO算法具有更低的响应时间,更小的超调量,在0.7s处已经趋于稳定,表现出优异的控制精度。
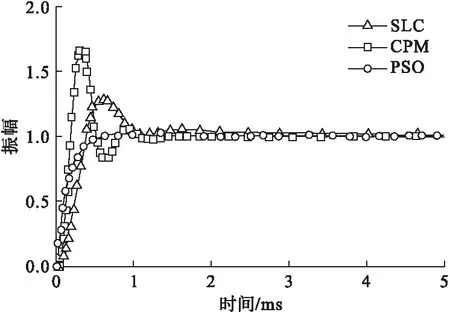
图7 不同算法的阶跃响应曲线
4 结论
(1)权重系数影响PSO算法的收敛速度及全局搜索能力,随着权重系数的变大,终止的性能指标要求变高,超调量降低,响应时间变快。
(2)加速因子c1=c2时,系统能取得最优方案,加速因子过大,粒子群错过最优解,致使系统发散。加速因子过小,会陷入局部最优,调节时间长,超调量大。
(3)限定幅值过小,粒子飞行步幅小,粒子将陷入局部最优,响应时间长;限定幅值过大,粒子飞出最优区域,系统发散。
(4) 对整定后的参数值进行三元图的绘制,越靠近右下底角,控制精度越高;越靠近顶角,系统越不稳定。
PSO算法优于传统算法,具有超调量低、响应速度快、方法简单的特点,降低了设计难度,为工程参数寻优提供方法借鉴。
