螺杆型施肥泵特性及降维简化方法研究
2020-07-29肖志刚袁洪波
杨 瑞,肖志刚,袁洪波,程 曼
(河北农业大学 机电工程学院,河北 保定 071001)
中国是农业大国并且水资源匮乏,节水灌溉工程建设和水肥一体化成为全国农业发展最关心的部分。农业部提出,希望在2020 年实现主要化肥零增长,将主要农作物化肥利用率达到40%以上,做到节水节肥[1]。水肥一体化技术重点在于将水和肥按比例配合,根据作物不同生长阶段养分需求和土壤情况,实时精准施肥[2-3]。目前常用的施肥装置一般分为3 种,文丘里施肥器、压差式施肥罐,注肥泵[4]。 文丘里管流过水时产生真空吸力,吸入肥料溶液进行施肥。压差施肥是利用进水管与出水管口之间的压力差将灌溉水流入肥料罐,稀释肥料后进行灌溉[5]。 注肥泵将肥料注入灌溉管道,施肥比例与压力流量和水泵转速相关,具有施肥比例可控,运行稳定,控制简单,经济适用等优点[6-7]。
常用的注肥泵有离心泵、往复泵和螺杆泵(转子泵)等。离心泵几乎没有自吸作用,需要泵内预先有一定量的液体形成压差,而且由于叶片的作用会影响液体的流速。结构简单,造价低,体积小,安装检修方便,对应一定流量只能达到一定扬程[8];往复泵是通过液体容积的收缩膨胀来混合液体,入口处形成负压,能够自行灌注。压力越大,工作效率越高。适用于高压力,小流量的清洁介质但要求完全无泄漏,对应一定流量可达到不同扬程,由管路系统决定,结构复杂,振动大,体积大,造价高[9],适合试验使用,不利于推广。螺杆泵适用于中低压力,中小流量,尤其适用于黏性较高的介质,结构简单,造价低,体积小,安装检修方便。本试验使用的营养液有一定的黏性,对流量范围和压力范围要求并不高,对比考虑选择较为经济,便于使用的螺杆泵[10-11]。
施肥泵特性分析是实现精准配肥的基础[12-14],笔者对螺杆泵在压强、流量、电压3 个方面的特性进行了试验研究,得到了三者之间的关系模型,发现3 个变量之间存在非线性、强耦合关系,有多个高阶项[15-16]。按照泵特性直接进行施肥流量控制计算量相对大,作为控制核心的单片机来完成这种工作,会导致运算速度较慢,耗费时间,因此需要对泵特性进行降维简化以提高单片机运算速度,从而提高配肥效率,实现快速实时配肥[17-18],笔者采用边折叠算法[19]对泵特性物理模型进行降维简化,并验证了该方法的可行性。
1 试验设计及分析方法
1.1 试验系统构建
本试验中的施肥泵性能测试平台由水桶、螺杆泵、涡轮流量计、压力传感器、电机调速器和循环管路组成,实验平台搭建如图1 所示,具体设备如表1 所示。利用该平台进行试验时,通过改变施肥泵供电电压达到调节其转速,进而调节其流量的效果,试验过程中通过相应的传感器记录施肥泵的电压、流量和压力数据。
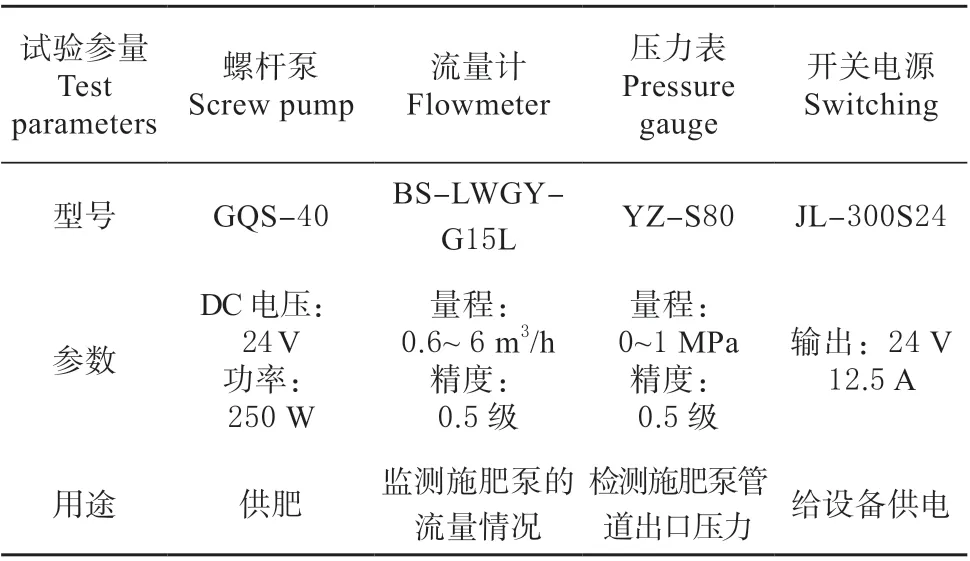
表1 实验设备Table 1 Experimental equipment
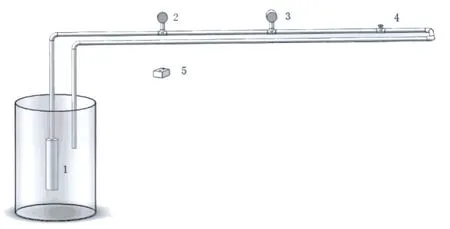
图1 实验平台Fig.1 Experimental platform
1.2 流量传感器校准
为了实现精准测量,流量计在使用之前需要校准。校准试验时,选用5 L 的量筒,记录量筒注满水的时间来计算流量作为测量值,在不同的流量条件下进行5 次试验,将流量测量值与流量计所采集的数据进行回归,完成后再进行10 次试验对回归结果进行验证。
1.3 施肥泵特性试验
试验于2019 年4—5 月在河北农业大学城建学院5 楼温室中进行。管道(PPR)直径25 mm,工作压力0.06 ~0.3 MPa,流量范围0.3 ~1 m3/h。通过调节调速器改变电压达到改变转速的效果,使用阀门调节压强,记录流量值的变化。螺杆泵启动电压为10 V,为了得到稳定的流量、转速、压强之间的关系,将施肥泵电压设定从12 V 增加到额定电压值24 V,每次增加0.5 V,记录螺杆泵出口压力值和流量值。压强从0.02 MPa 开始,直到0.14 MPa,每次增加0.02 MPa,分别记录流量和电压值。流量值从0.2 m3/h 到1 m3/h,每次增加0.05 m3/h,分别记录压强值和电压值。每组实验重复5 次取均值,将得到的实验数据记录,共进行720 组实验。将汇总的数据通过Matlab 软件的Ezsurf 工具箱进行多项式拟合并分析[20]。
1.4 降维简化方法
水泵的关系模型符合高阶非线性方程,存在较多的浮点运算,单片机在处理这种方程时速度较慢。该模型的物理化体现是1 个曲面模型,笔者利用边折叠降维简化算法将曲面模型化简为平面模型,将非线性方程简化为线性方程,以保证精度为前提,提高单片机的运算速度。
曲面模型简化不只是为了减少网格的数量,需要在保证原始模型的精度和拓扑结构的基础上,去除影响不大的平面数量,保留体现模型特征的平面,得到接近原始模型的简化模型[21]。国内外许多学者对模型的简化方法研究已经有了一些成果,主要有去边法,去点法,最大多边形法,优化法等[22-24]。在众多方法中,边折叠算法比较简单容易实现,简化后模型精度较高。因此,本文选择运用边折叠算法简化三维曲面模型,用近似的平面代替曲面,使数学模型由非线性近似为线性模型,简化水泵特性的数学模型。比对模型化简前后数据,验证其有效性。
边折叠原理如图2 所示,对边(Li,Lj)的折叠操作可以简化记为(Li,Lj→L),用新顶点代替原来的顶点,把与其相邻的平面片删除,形成新的平面。
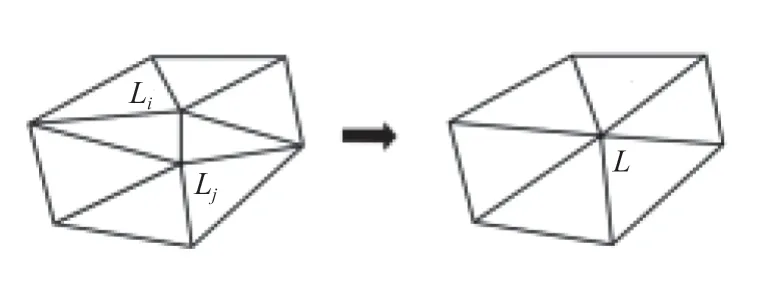
图2 边折叠示意图Fig.2 Side folding diagram
边折叠法是将边作为被删除的基本元素,按照某种特定的条件删除不重要的边,保证删除后原模型的变化最小,不影响拓扑结构的变化,迭代上述过程,直到满足设定的条件。
2 试验结果及数据分析
2.1 传感器校准结果及分析
将55 次试验的数据整理,使用Matlab 中Curve Fitting Toll 工具箱进行数据拟合,结果近似为1 条直线Q'=0.919 6Q+0.029 83,相关系数R2=0.993 5,如下图3 所示。
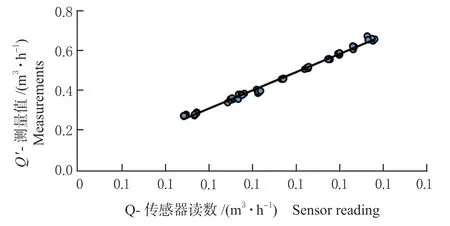
图3 流量回归方程Fig.3 Flow regression equation
随机进行10 组试验,将得到的试验结果与校准公式计算的结果进行比较如表2 所示。通过表2 可以看出,最大误差为6.989%,出现在流量为 1.003 m3/h 时,相当于误差为0.3 L/min。最小误差为 0.397%,平均误差为2.98%,流量变化约为0.228 L/min。 经验证,误差服从正态分布,可见得到的公式具有一定的准确性。
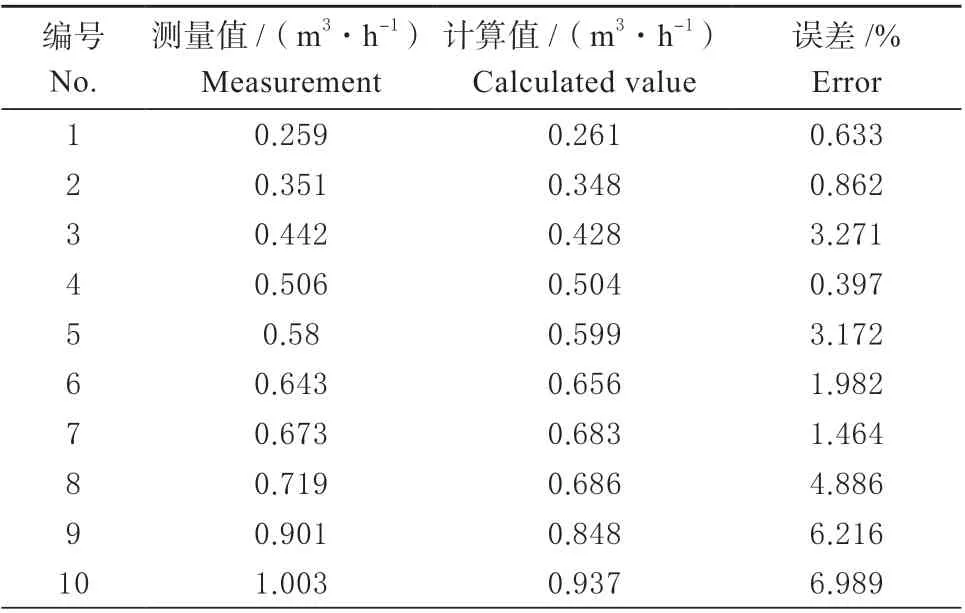
表2 验证试验数据Table 2 Verification test data
2.2 螺杆型施肥泵特性试验结果及分析
笔者利用试验得到的数据,通过Matlab 软件中Cftool 工具箱对压强,流量以及所对应的电压3 个因子进行拟合,建立水泵特性的数学模型。拟合关系式如下:

式中,f(Q,P)代表电压;Q为流量;P为压强。
由上式可以看出,3 个因子之间存在非线性,强耦合的关系,具有多个高次项,压强,流量、电压3 个因子每个因子单一变化都会影响其他因子的改变。利用Matlab 软件中的Ezsurf 函数工具箱,得到曲面模型如下图4 所示。

图4 数学模型Fig.4 Mathematical model
为了验证泵特性数学模型的准确性,进行了15组验证试验,将实际测量电压值与计算得到的电压值进行对比,对比结果如图5 所示。可以看出,两折线图趋势基本一致,证明得到的曲面模型较为精确。
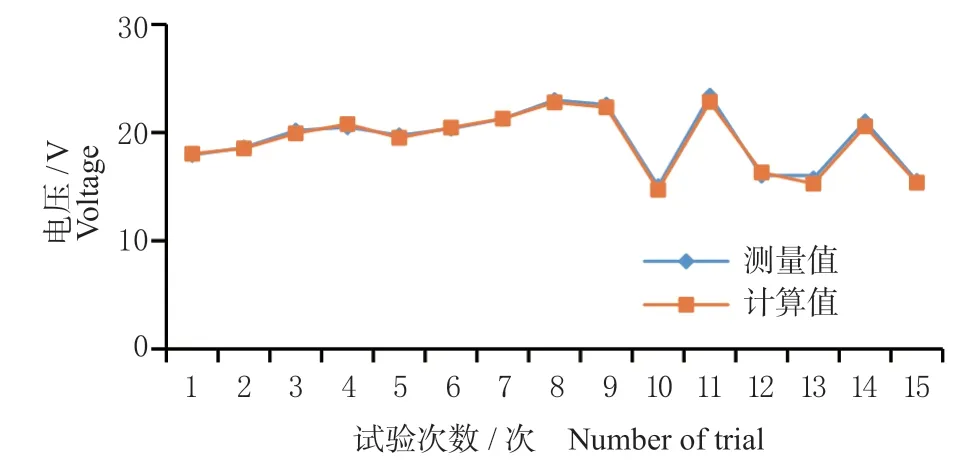
图5 数学模型验证实验Fig.5 Mathematical model verification experiment
2.3 泵特性降维简化结果及分析
采用边折叠算法进行降维简化流程如图6所示,结合对泵特性三维曲面图形的行(流量),列(压强)的曲线变化分析,得到最终的曲面划分结果。
具体步骤如下:
(1)划分子区域并编号。将施肥泵特性模型根据实际流量压强和颜色深浅变化趋势划分为12×12的子区域,在每个子区域中采用平面对曲面进行近似简化,并得到流量、压强和电压的1 次方程。根据简化前泵特性模型,计算每个子区域中不同流量、压强对应的电压值;针对每个子区域,根据简化后平面数学模型计算出该区域不同流量、压强对应的近似电压值;将第i行第j列的子区域编号为ai,j,其中i,j=1,2…,12。
(2)沿列方向对子区域进行合并。将ai,j与ai+1,j2 个子区域合并,得到新的平面方程,并分别计算该新区域对应的简化前后的电压值,再次进行回归拟合,如果得到的R2(决定系数)大于0.97 则认为该次合并有效,新区域编号为ai+1,j,然后尝试将ai+1,j与ai+2,j合并;若不满足条件,保持原编号不变,尝试将ai+1,j与ai+2,j合成新的平面;按照该模式对每一列子区域进行操作,直至12 列子区域分别合并完毕。按从左到右,从下到上的顺序对合并后子区域重新进行编号a1,1…an,12(n≤12)。
(3)对重新编号后的子区域继续进行合并。从第2 列a1,2开始,当前列每个子区域分别与前一列的全部子区域按由下到上的顺序尝试进行合并,直至第12 列子区域合并完毕。
当前列子区域编号为ai,j,前一列子区域编号为ak,j-1,即将为ai,j与为ak,j-12个子区域进行合并,得到新的平面方程,并分别计算该新区域对应的简化前后的电压值,再次进行回归拟合,如果得到的R2大于0.97 则认为该次合并有效,新区域编号为ai,j,然后尝试将为ai,j与为ak+1,j-1个子区域进行合并;若不满足条件,保持原编号不变,尝试将为ai,j与为ak+1,j-1合成新的平面。将a1,2与第1 列所有子区域合并完成后,尝试将a2,2与第1 列所有子区域进行合并,直至第2 列所有子区域分别与第1 列所有子区域尝试合并完成;按照该模式对每1 列子区域进行操作,直至第12 列子区域合并完毕。子区域沿列方向合并结束后,每列行数不一定相等,记录第j列的行数为rowj。
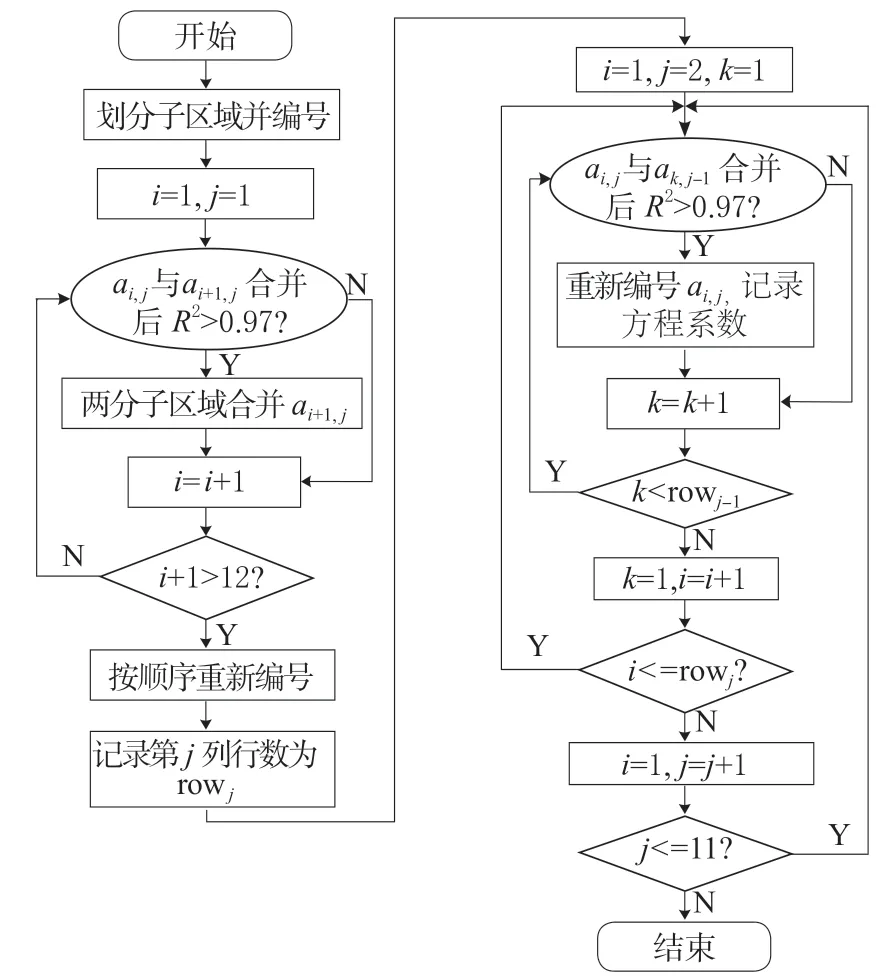
图6 边折叠算法流程图Fig.6 Flow chart of edge folding algorithm
使用边折叠算法将曲面模型近似用一些平面替代,结合对三维曲面模型的行、列曲线变化分析得到的曲面划分如下图7 所示。
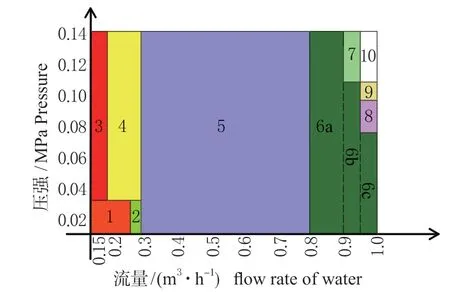
图7 曲面的划分Fig.7 Surface division
曲面化简为10 个平面。每个不同颜色的区域近似表示1 个平面,与图4 数学模型的三维曲面结合来看,右上角部分梯度变化较大,中部较平坦。梯度变化较大的地方误差也比较大,为了减小误差,此区域的划分要更细致,使其能够满足实际的需求。
使用Plot工具箱对每个子区域的数据进行整合,得到近似替代曲面模型的平面片的数学模型。10 个平面的数学模型如下表3 所示(为了便于表达,将第6 个平面分为6a,6b,6c)。
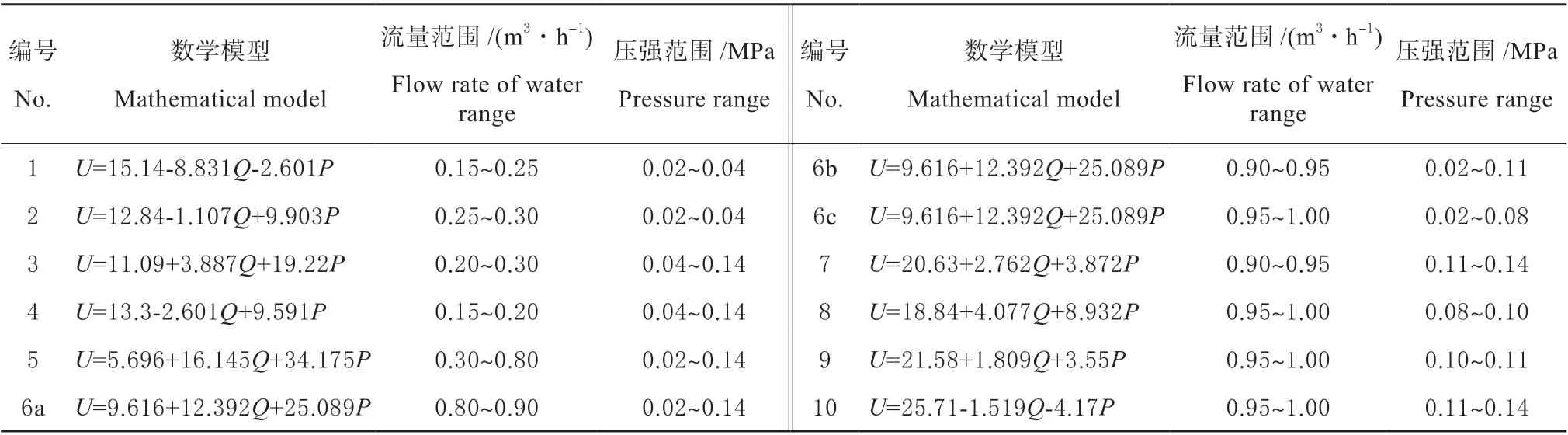
表3 数学模型Table 3 Mathematical model
为了评估简化模型的精度,随机进行15 组试验,记录电压、流量、压强值,根据曲面公式计算电压值和流量值,利用边折叠算法进行化简,比较原模型计算值与化简后的值。结果如下表4 所示。
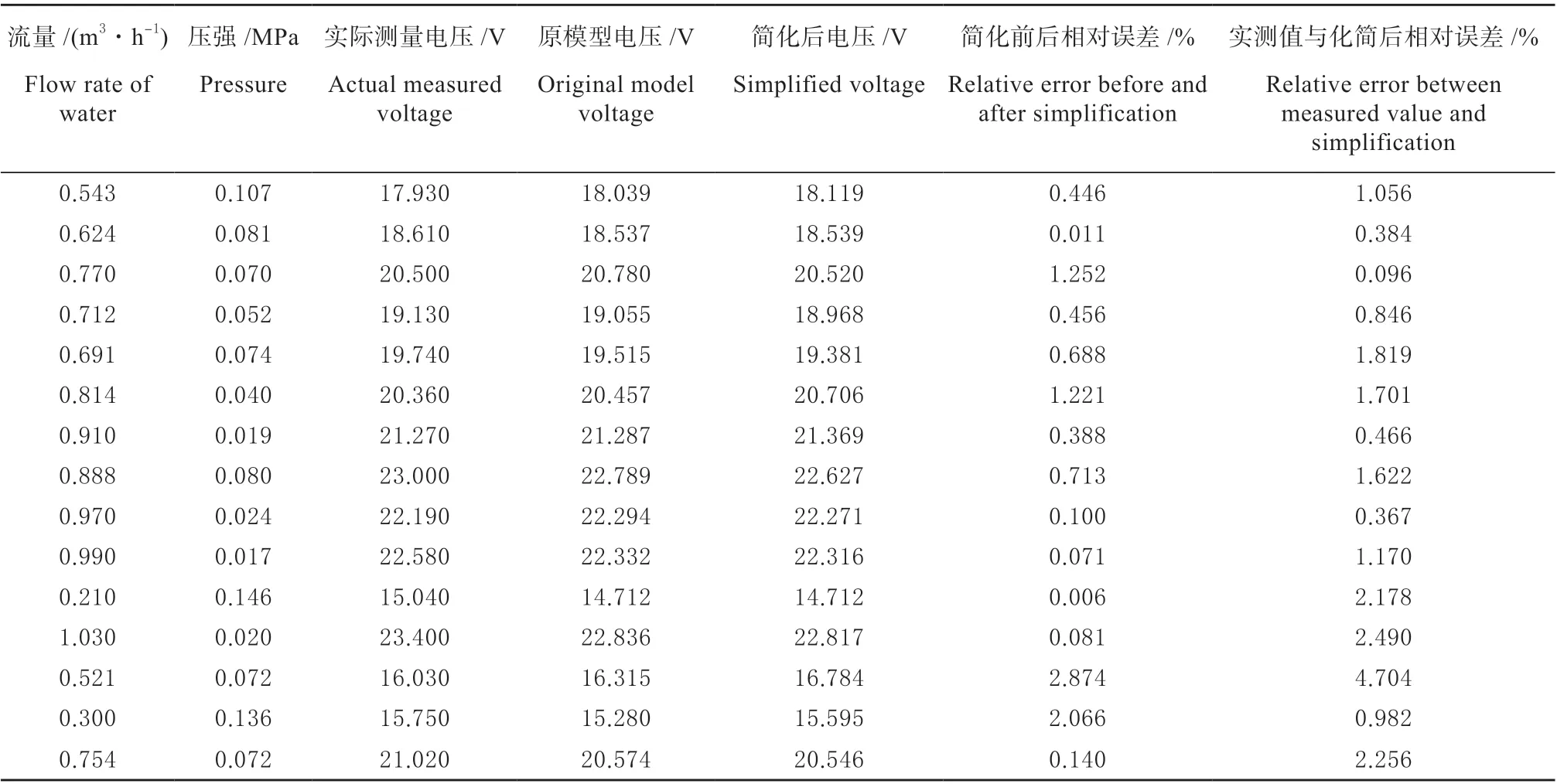
表4 简化前后三维曲面电压对比结果Table 4 Comparison of voltages before and after simplification of three-dimensional surfaces
由上表可以看出,经过降维简化后,电压与数学模型计算得到的电压有部分误差,电压较大时,误差有增大的趋势,但最大误差不超过3%,最小误差为0.006%,平均误差为0.357%,电压误差约为0.1V,可以满足实际需求。曲面模型计算的流量值与边折叠算法化简后的流量值之间存在一定的误差,经计算,误差符合正态分布(表5)。
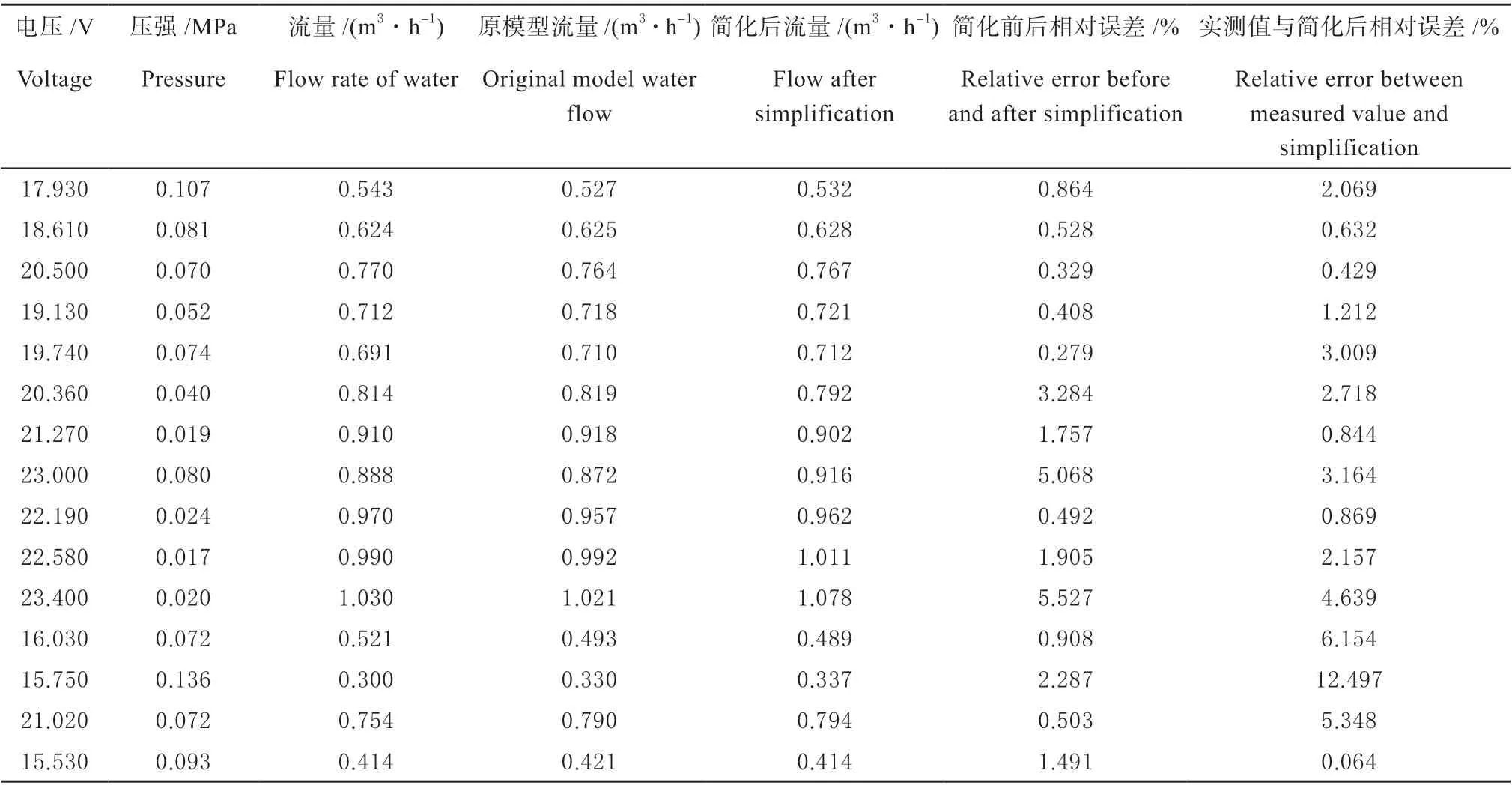
表5 简化前后三维曲面流量对比结果Table 5 Comparison results of 3D surface flow before and after simplification
可以看出,压强较大时,误差逐渐增大,压强小于0.04 MPa 时,误差也会有所增加,压强在两者之间时,误差相对比较小。所以在曲面的左下方和右上部分需要将平面划分的较小来减小误差,中间部分比较平坦,划分较少,与上图曲面划分原则相吻合。化简前后最大误差约为5.527%,相当于有0.38 L/h 的误差,最小误差约为0.279%,平均误差为0.717%。实际测量值与化简后的最大误差为12.497%,误差约为0.625 L/h,最小误差为0.064%,平均误差约为1.309%。精度可以满足实际需求。
3 讨论
经测试,降维化简仅适用于三维曲面,需要将曲面划分为矩形块进行进一步简化,有一定局限性。
编写单片机程序,分别使用化简前后公式进行计算比较。结果表明,利用化简后的10 个公式进行编程运行更简单快捷。简化后的模型在单片机中运行稳定,运行速度提升了54.8%,具有更好的运算效率。通过试验获得螺杆泵的特性,建立了数学模型,针对水肥一体化营养液的调控,实现了按比例施肥有效提高资源的利用率,并且减少环境的污染的效果。使用边折叠算法化简数学模型,对比化简前后的模型,存在一定的误差,但在允许的范围内(表6)。简化后得到的数学模型,使得单片机程序更加简单,一定程度上节约了运行时间,降低了对单片机的要求,节约了成本。但是笔者仅对螺杆泵特性模型进行了简化,对于不同泵的特性模型简化是否适用是接下来需要继续进行的工作。
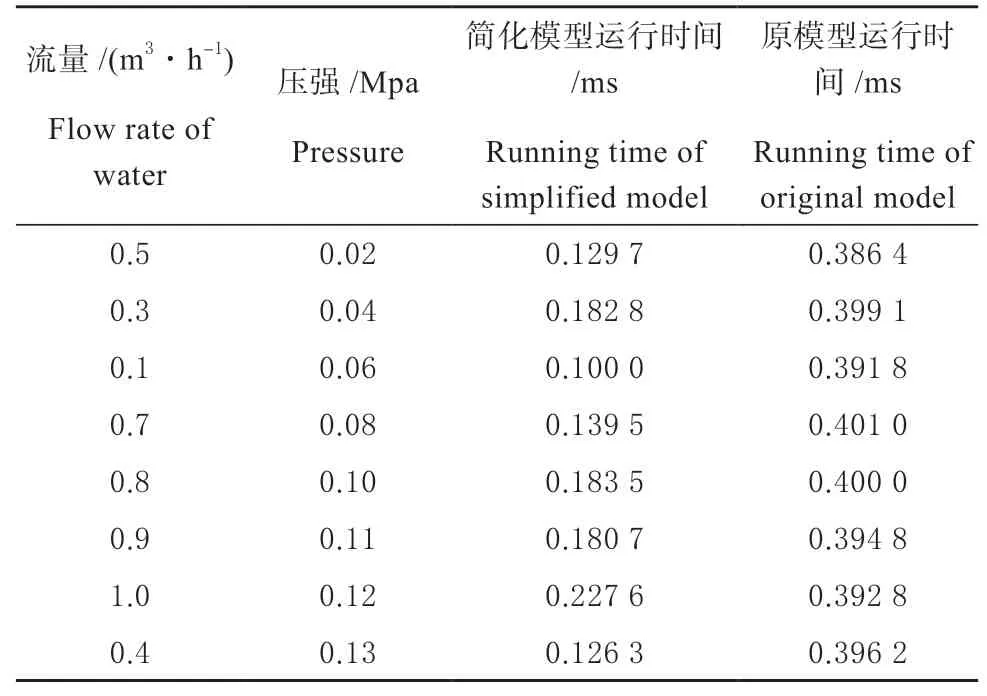
表6 运行参数对比Table 6 Comparison of operating parameters
4 结论
为了实现精准配肥,笔者选用造价低、结构简单的潜水型螺杆泵进行泵特性的试验测试及分析研究,得到了关于流量、压强、电压三者之间的关系模型。利用边折叠简化算法完成了对泵特性模型的降维简化,并做了对比验证试验。结果表明:
(1)简化后流量的误差服从正态分布,平均误差不超过3%。
(2)简化后压强的误差服从正态分布,最大误差不超过3%。
相对于施肥泵的精度要求,这一误差在可接受范围内。使用化简后的数学模型能够减少单片机的运算时间,提高了效率,降低了编程的难度。
