具有两类失效模式和修理工休假的重试系统可靠性分析
2020-07-28刘思佳胡林敏刘朝彩
刘思佳,胡林敏,刘朝彩
(燕山大学理学院,河北 秦皇岛066004)
1.引言
对于工程系统来说,维持较高的可靠性是至关重要的.表决系统作为典型的冗余系统,能够提高系统的可靠度和可用度,因此被广泛应用于各种实际工程中.一些对表决系统经典模型及扩展模型的研究可见文[1-3].这些文献都假定部件只有正常和失效两种状态,但很多实际情况中,部件可能不止一种失效模式.例如,电子线路中就有开路失效和短路失效两类失效模式.对于具有多类失效模式的表决系统的研究还较少.Ben-Dov[4]研究了部件(例如开关和电磁继电器)具有打开失效和关闭失效两类失效模式的k/n(G)系统.Moustafa[5−6]分别研究了具有两类失效模式和多类失效模式的表决系统可靠性.TANG等[7]对基于微马尔可夫模型的多类失效模式k/n(G)系统的不可用性进行了分析.
重试排队系统以其在实际问题中的广泛应用得到大量学者的关注[8−10].在系统可靠性分析中,重试系统指系统内部没有失效部件的等待空间,如果部件失效时,修理工正在忙或者休假,则失效部件进入重试空间,一段时间后再进行尝试,直到得到修理.Krishnamoorthy和Ushakumari[11]分别对三种不同情况的k/n(G)重试系统进行了研究,得到了相应的可靠度函数.KE等[12]研究了具有温贮备部件的表决可修重试系统,给出了计算系统稳态可用度的有效算法.KUO等[13]考虑了具有混合贮备部件的表决可修重试系统,得到了系统平均寿命和稳态可用度的具体表达式.最近,YANG和Tsao[14]对修理工可工作休假的k/n(G)重试系统可靠性进行了分析,利用矩阵分析法和拉普拉斯变换等方法得到了系统的稳态可用度和平均寿命.
在可修系统中,修理工由于各种各样的原因需要休假.很多文献都假设只有修理完系统中的失效部件,修理工才去休假.但大多数情况下,即使系统中还有失效部件,修理工也会进行休假,典型的此类休假有Bernoulli休假.涉及到可靠性指标的具有Bernoulli休假的重试排队系统可见文[15-17],但在系统可靠性分析中,还没有文献对具有Bernoulli休假及多类失效模式的重试系统模型进行研究.本文考虑部件具有两类失效模式的表决重试系统,且修理工进行Bernoulli休假.首先,提出假设,构建模型;然后,通过对系统的整体分析,求得稳态可用度、可靠度函数和系统首次故障前平均寿命等可靠性指标;最后,通过数值例子分析系统参数的变化对可靠性指标的影响.
2.模型假定
本文对研究的系统模型作如下假定:
1) 系统由n个同型部件和一个修理工组成,当n个部件中有k个或k个以上部件正常工作时,系统正常工作,即当失效的部件数大于或等于L=n−k+1时,系统失效.特别地,本文仅研究n=5,k=4时的表决系统,此时L=2.
2)每个部件有两类失效模式,记为类型a失效和类型b失效,失效概率分别为p和q,且p+q=1,p >0,q >0.所有部件的寿命均服从参数为λ的指数分布.修理工修理部件类型a失效的时间服从参数为µa的指数分布,修理部件类型b失效的时间服从参数为µb的指数分布,部件修复如新.
3) 修理工进行Bernoulli休假,当修理完一个部件后,修理工或者以概率h进行休假,或者以概率¯h在系统中保持空闲,且h+¯h=1,h>0,¯h>0.休假时间服从参数为θ的指数分布.
4) 系统中没有等待空间,当部件失效时,如果修理工空闲,则立即修理失效部件;如果修理工正忙或正在休假,则失效部件进入重试空间,一段时间后进行重试,直到得到修理.部件的重试时间服从参数为γ的指数分布.
5) 所有随机变量均相互独立.
6) 初始时刻所有部件都是新的,系统开始工作,修理工空闲.
3.模型分析
令M(t) =m表示时刻t重试空间中的部件数,m=0,1,2;I(m) =i表示m个部件的组合序列数,i=1,2,...,2m;xmi表示m个部件的失效类型组合的所有可能情况,x01=0,x11=a,x12=b,x21=aa,x22=ba,x23=ab,x24=bb;J(t)表示时刻t修理工的状态:
则{J(t),M(t),I(m),t ≥0,m ≥0}构成一个向量马尔可夫过程,系统在时刻t的状态概率定义如下:
P0,mxmi(t)=P{J(t)=0,M(t)=m,I(m)=i},m=0,1,2;i=1,2,...,2m,
P1a,mxmi(t)=P{J(t)=1a,M(t)=m,I(m)=i},m=0,1;i=1,2,...,2m,
P1b,mxmi(t)=P{J(t)=1b,M(t)=m,I(m)=i},m=0,1;i=1,2,...,2m,
P2,mxmi(t)=P{J(t)=2,M(t)=m,I(m)=i},m=0,1,2;i=1,2,...,2m.
记λm=(n−m)λ,0≤m ≤L;γm=mγ,1≤m ≤L.进一步可得系统状态转移图如图3.1所示.在图3.1中,方框内的状态为系统的失效状态.
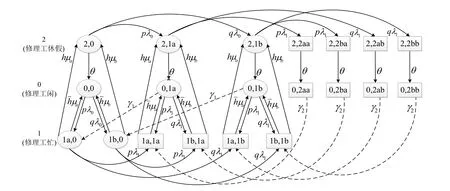
图3.1 系统状态转移图
4.系统稳态可用度
其中,
定理4.1系统稳态可用度为

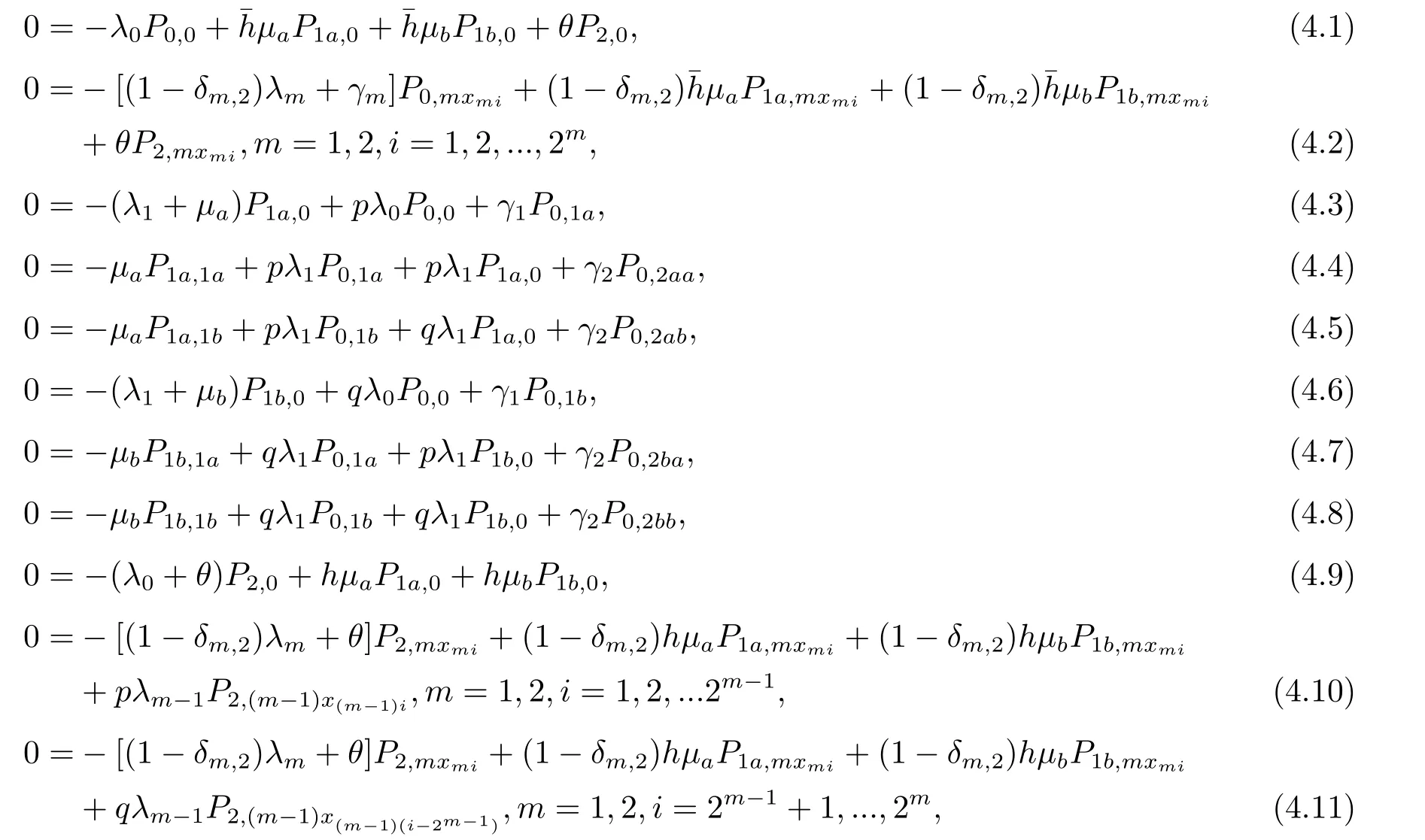
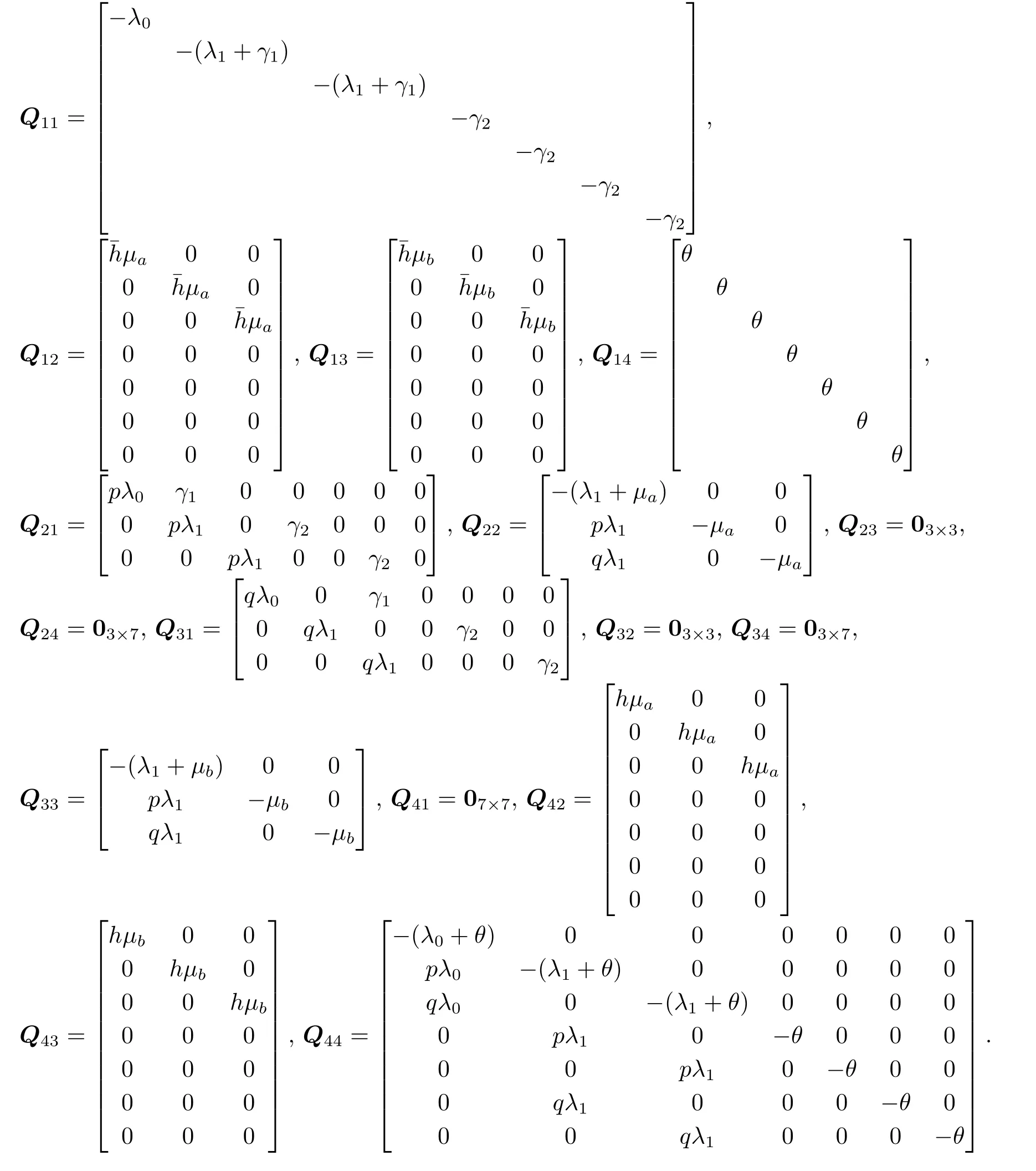
证方程(4.1)-(4.11)可以写成矩阵形式


矩阵Q的各分块矩阵表示如下:
用正则条件

替换掉(4.13)式中的任何一个等式,则可由克莱姆法则计算得到系统的稳态概率:Pj,mxmi(j=0,1a,1b,2;m=0,1,2;i=1,2,...,2m),从而得到系统稳态可用度为

当λ=0.1,γ=0.5,θ=0.5,h=0.5,µa=2.0,µb=3.0,p=0.5时,由MATLAB软件计算得到系统稳态可用度的数值解为

5.系统首次故障前平均寿命
令所有系统故障状态为马尔可夫过程吸收态,可得系统状态概率拉普拉斯变换方程组为
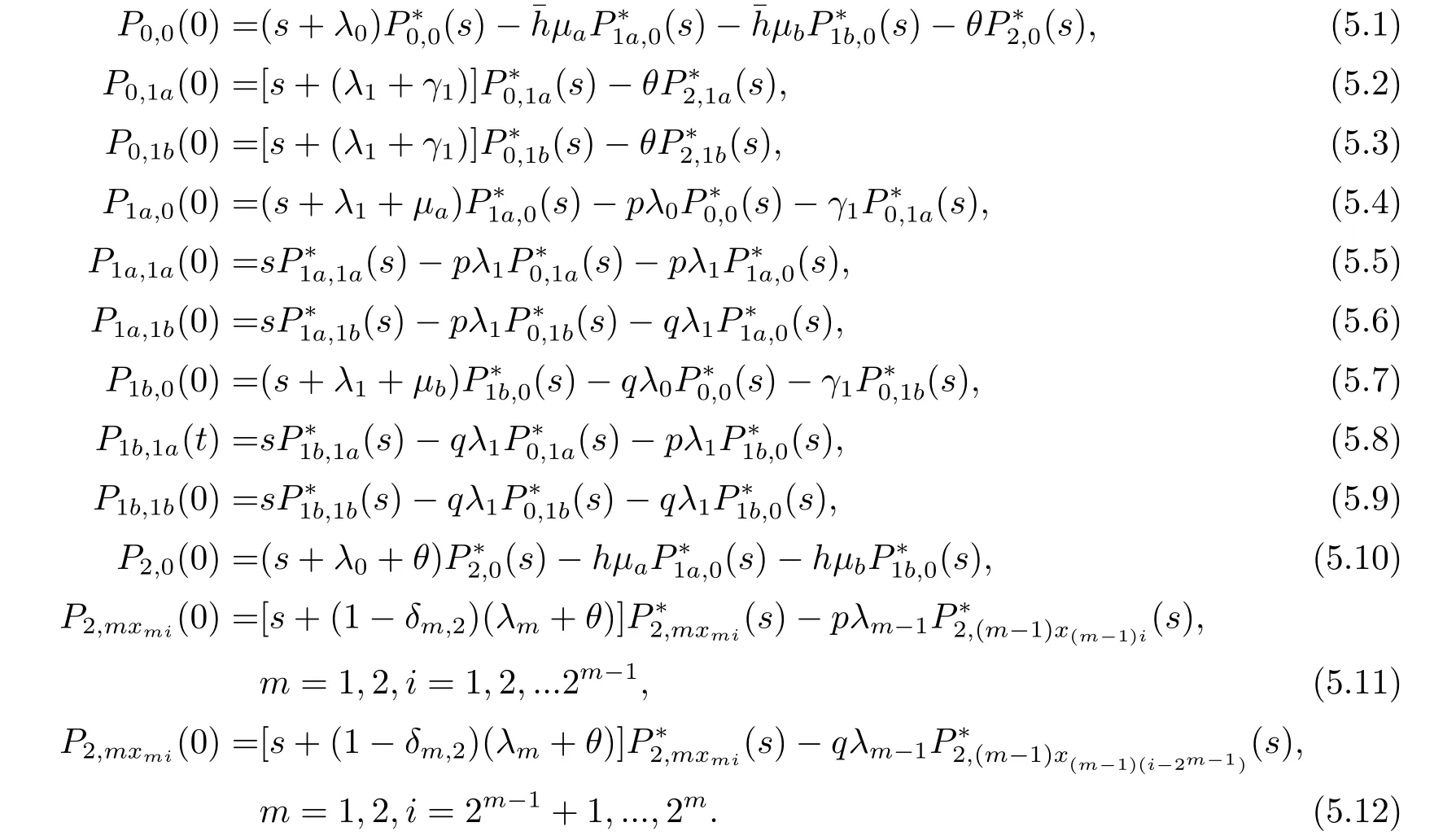
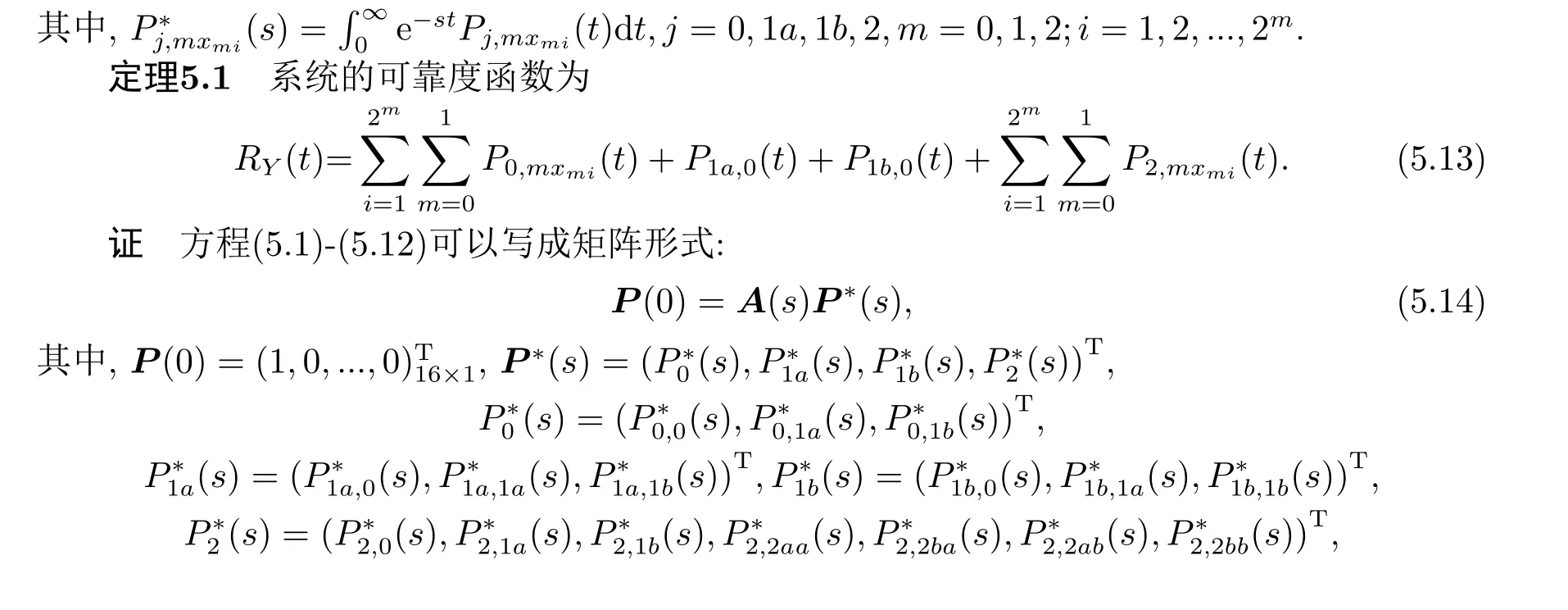
A(s)=A+sI,I为单位矩阵,
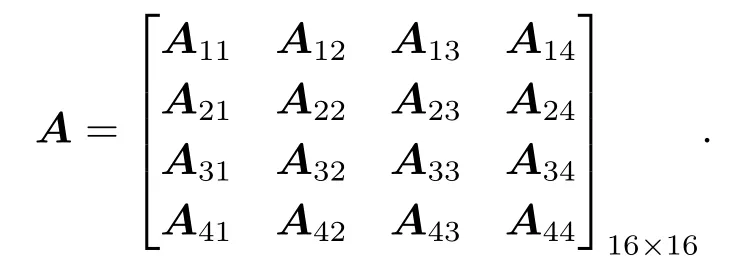
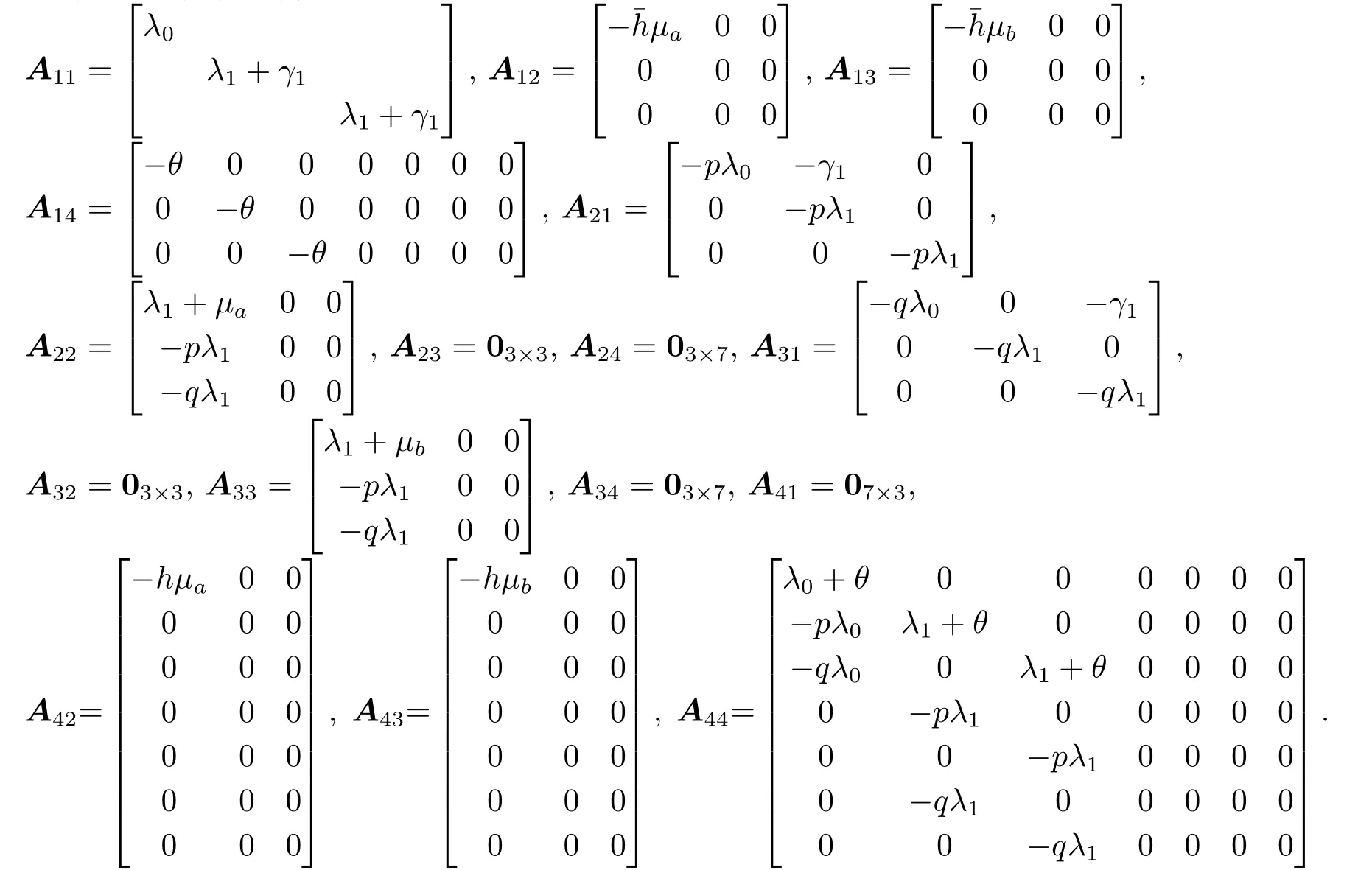
矩阵A的各分块矩阵表示如下:
当λ=0.1,γ=0.5,θ=0.5,h=0.5,µa=2.0,µb=3.0,p=0.5时,由MATLAB软件计算得到系统首次故障前平均寿命的数值解为

6.数值例子
本节主要考虑系统参数λ,γ,θ,h,µa,µb,p的变化对稳态可用度AT(∞)和系统首次故障前平均寿命MTTFF的影响.令λ=0.1,γ=0.5,θ=0.5,h=0.5,µa=2.0,µb=3.0,p=0.5,再分别改变以上各参数的值进行分析,所得结果如图5.1-5.4和表5.1-5.4所示.正如我们所期望的,AT(∞)和MTTFF的值随λ的增大而减小,随µa或µb的增大而增大.从图5.1和表5.1可看出,AT(∞)和MTTFF的变化与γ的变化成正相关,说明失效部件越快得到修理,系统的可靠性越高.另外,图5.2和表5.2显示AT(∞)和MTTFF的值随θ的增大而增大,随h的增大而减小,这种情况可以解释为虽然休假对于修理工来说是必不可少的,但是休假时间越少,系统可靠性越高.特别的,从图5.3、5.4和表5.3、5.4中可以看出,当µa <µb时,AT(∞)和MTTFF随p的增大而减小;当µa >µb时,AT(∞)和MTTFF随p的增大而增大;当µa=µb时,AT(∞)和MTTFF的值不随p的改变而改变.这说明系统的可靠性很大程度上依赖于修理工的修理效率.因此,可以通过适当提高部件的重试效率、增大修理工的修理效率、减少修理工的休息时间等方法来提高系统的可靠性,同时也要兼顾系统结构和系统成本.
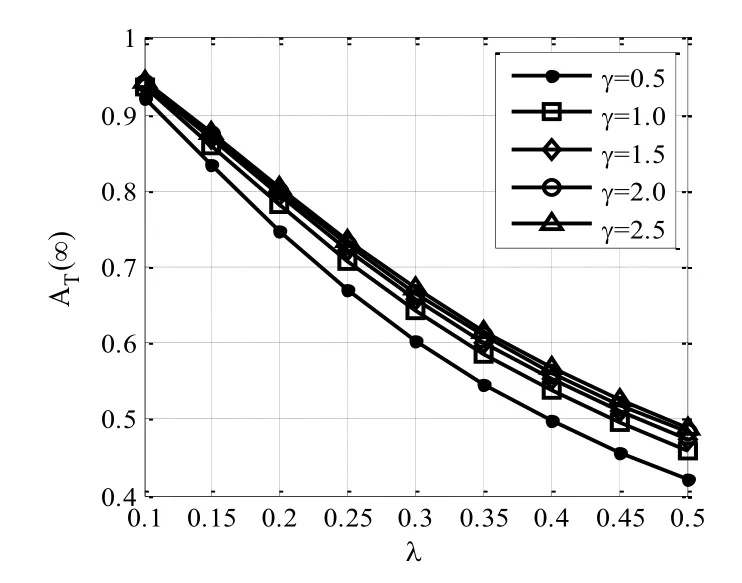
图5.1 不同参数λ和γ下系统稳态可用度变化曲线
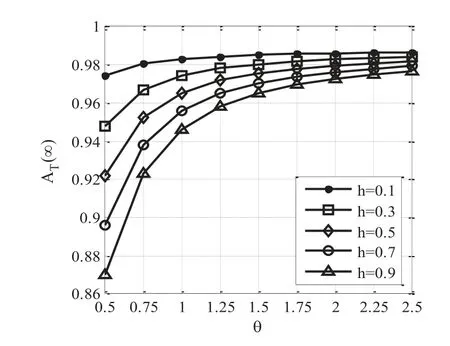
图5.2 不同参数θ和h下系统稳态可用度变化曲线
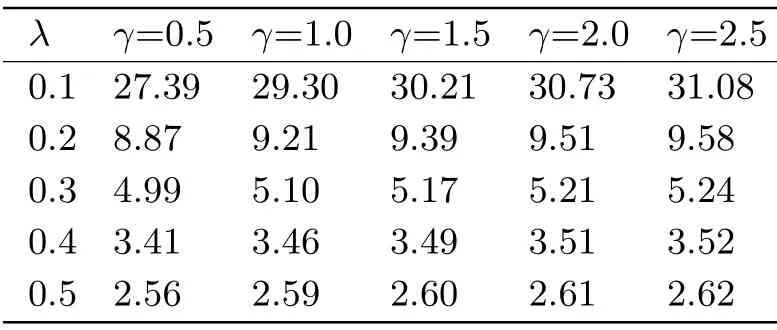
表5.1 不同参数λ和γ下系统首次故障前平均寿命变化值
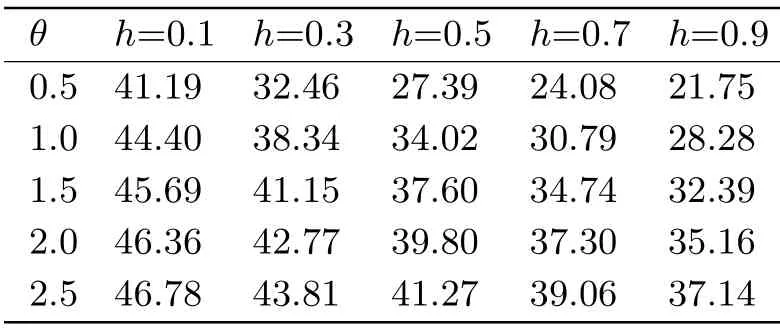
表5.2 不同参数θ和h下系统首次故障前平均寿命变化值

图5.3 不同参数µa和p下系统稳态可用度变化曲线
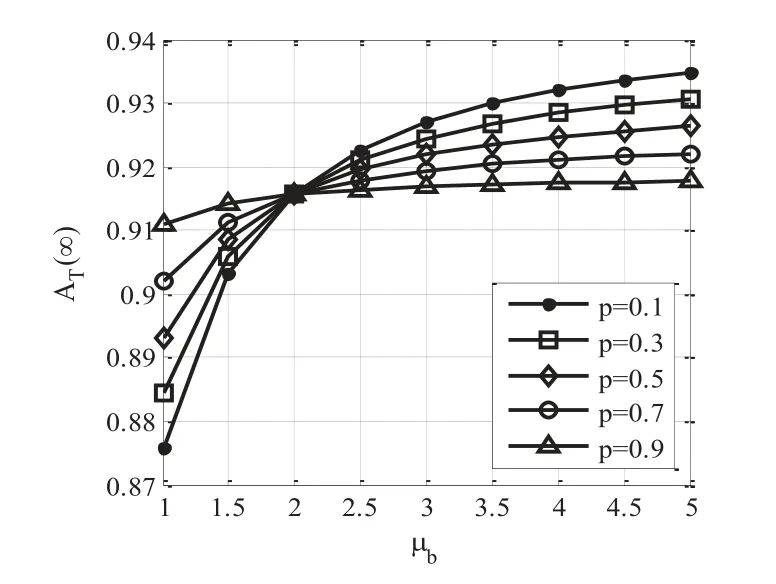
图5.4 不同参数µb和p下系统稳态可用度变化曲线
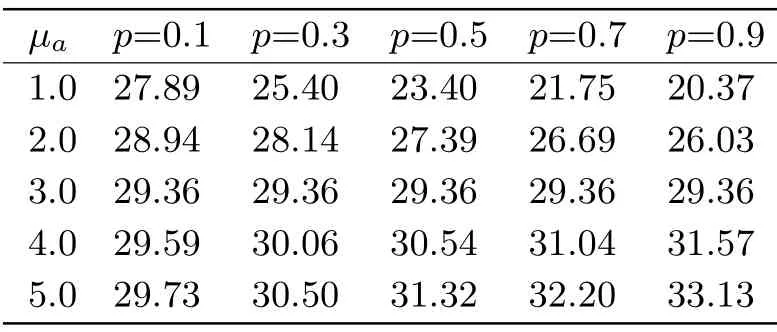
表5.3 不同参数µa和p下系统首次故障前平均寿命变化值

表5.4 不同参数µb和p下系统首次故障前平均寿命变化值
7.结论
本文研究了部件具有两类失效模式且修理工Bernoulli休假的k/n(G)(k=4,n=5)重试系统,得到了一些重要的可靠性指标,分析了系统参数对可靠性指标的影响,为设备的管理与维护提供了理论依据.在今后的研究中,我们将进一步推广该模型: 1)考虑一般的具有两类失效模式和休假的k/n(G)重试系统;2)考虑修理工休假时间服从一般分布的k/n(G)重试系统.
猜你喜欢
杂志排行

应用数学的其它文章
- 具有惯性项和阻尼项的Cahn-Hilliard方程的整体吸引子
- 一角点支撑对面两边固支正交各向异性矩形薄板弯曲问题的辛叠加解
- Positive Solutions for Fractional Differential Equations with Integral and Infinite-Point Boundary Conditions
- Comparison Principle of Very Weak Solutions for Nonhomogeneous Elliptic Equations
- Global Existence,Asymptotic Behavior and Uniform Attractor for a Non-Autonomous Thermoelastic Timoshenko System of Type I with a Memory Term
- A m,p-Laplacian Parabolic Equation with Nonlinear Absorption and Boundary Flux