皮带夹送传输控制算法
2020-07-27薛红昌廖清吴爱明潘锦明廖小健
薛红昌 廖清 吴爱明 潘锦明 廖小健

摘 要:通过对比两种传动链传输方案优缺点,挑选性价比更优的皮带夹送传输方案。为解决步进电机高频转矩低的缺点,通过负载自动检测控制算法,电机能“感知”外部负载变化,自动调节电机转速及转矩,既能使皮带传输通道高效传输,又能避免电机长期低速运转的发热问题。同时阐述一种用Excel表分析步进电机加减速曲线的方法,方便调试步进电机曲线性能。
关键词:皮带夹送;传动链;加减速曲线;负载检测算法
中图分类号:U293.2 文献标识码:A 文章编号:2096-4706(2020)06-0146-04
Abstract:By comparing the advantages and disadvantages of the two transmission schemes,the belt pinch transmission scheme with better cost performance is selected. In order to solve the problem of high frequency low torque of stepping motor,through the load automatic detection control algorithm,the motor can “sense” the external load change,automatically adjust the motor speed and torque,so that the belt transmission channel can not only efficiently transmit,but also avoid the heating problem of long-term low-speed operation of the motor. At the same time,a method of using Excel to analyze the acceleration and deceleration curve of stepping motor is described,which is convenient to debug the curve performance of stepping motor.
Keywords:belt pinch;drive chain;acceleration and deceleration curve;load detection algorithm
0 引 言
《自动售检票系统关键模块专用检测装置》已阐述专用检测装置工作原理。本文阐述传动链机构设计及控制算法。传动链机构的作用是将硬币/发卡模块清理下来的硬币/票卡从低处传输至高处的补币暂存器。
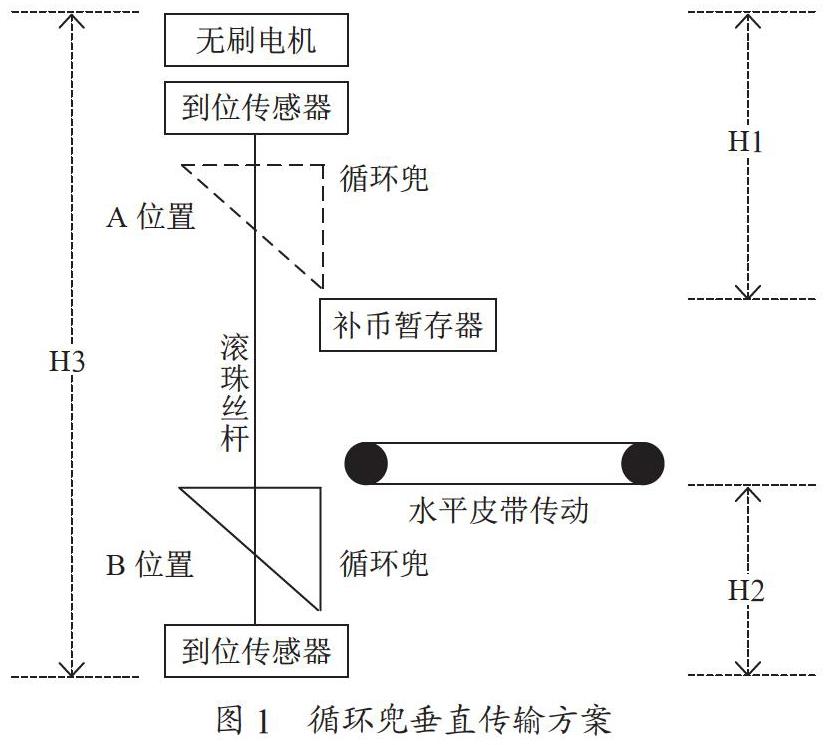
该传动链机构有2种设计方案。如图1所示,循环兜垂直传输方案中,循环兜可沿滚珠丝杆垂直运输硬币/票卡。当硬币/票卡沿水平皮带进入处于B位置的循环兜,循环兜沿着滚珠丝杆上升至A位置。硬币在重量作用下进入补币暂存器。当循环兜上升或下降过程中,水平传输带无法继续传送硬币/票卡,传输效率低。为提升传输效率,需选用高速无刷电机并加大循环兜容量。随着循环兜容量增加,又导致H1,H2空间较大,检测装置高度变高,不利于进出电梯搬运。如图2所示,皮带夹送传输方案可选用低成本步进电机,檢测装置高度较低。硬币/票卡可源源不断传输,传输效率高。通过对比,本文选用皮带夹送传输方案。
1 皮带夹送传输方案设计
1.1 外观图及传输原理示意图
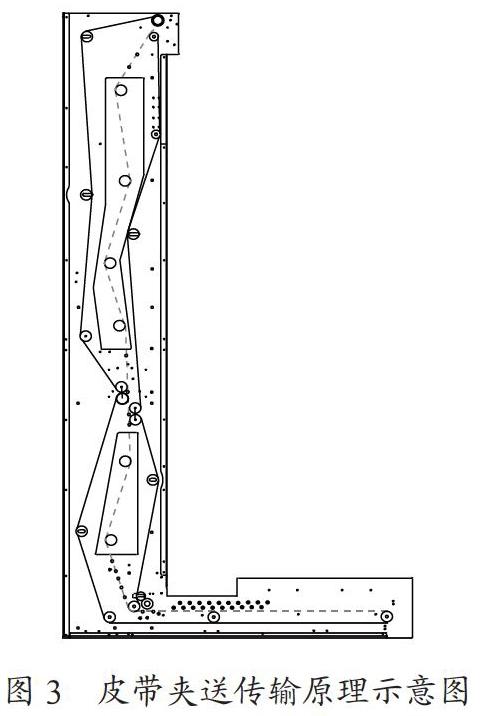
由于硬币/票卡传输距离较长,由2节皮带共同完成硬币/票卡传输任务。每节传输通道由1个步进电机驱动。步进电机配有手轮(如图2中11,14所示),传输通道侧面为透明亚克力板设计,方便观察硬币/票卡传输状态及清理卡币。电机选用信浓步进电机(步距角1.8°,型号:STP-59D3175)。光电传感器选用艾礼富ALEPH U型传感器(型号:OJ-451-J38),信号上升沿/下降沿典型值15 μs,可满足500线光电码盘高速信号采集。硬币/票卡沿着图3中的虚线曲线所示,从下往上传输。
500线光电码盘一转产生500个脉冲,假设100.0 ms中检测到的脉冲数为mpPulse,则步进电机PPS脉冲数与100.0 ms检测时间内的脉冲数的对应关系为:
vRPM=(1/6)*PPS*步进角=(1/6)*PPS*1.8=(mpPulse/ 500)*10*60
则mpPulse=(1/4)*PPS
通过100.0 ms内采集到的mpPulse便能推断出当前步进电机处于正常运转状态还是失步状态,失步状态检测误差范围5%,精度要求不高。
1.2 主控CPU与步进电机驱动电路设计
如图4所示,主控CPU选用LPC1788芯片,步进电机驱动芯片选用SLA7078MPRT芯片。SLA7078MPRT芯片的Vref参考电压和电机电流公式:
Vref=I*0.155(Vref参考电压取值范围:0.100 V~0.450 V)
步进电机限流值为2.8 A,则Vref=0.434 V
LPC1788的P0.12/AD0[6]与SLA7078的SenseA连接,可采样电机电流,确保电机不会堵转等故障现象。LPC1788的P2.31与SLA7078的Flag连接,当SLA7078故障时,LPC1788能及时获知故障状态。当SLA7078因故障处于保护状态后,需断开开关S,使SLA7078重新上电,Flag才能恢复正常工作状态。
2 步进电机加减速曲线设计
根据参考文献[1]中推导的步进电机加速曲线公式:
通过以上计算,一般认为当n等于g的2~3倍时,步进电机已到达目标频率。
假设fm取值10 000 Hz。步数N取值120,用Excel表格计算步进电机加速数据(如图5所示)。当g=10,g=50,g=100时,查看对应加速曲线图(如图6~图8所示)。g越小,则步进电机加速曲线越陡峭,加速到目标频率的时间越短。当g越大,则步进电机加速曲线越平缓,加速到目标频率的时间越长。通过加速曲线图对比,可直观评估步进电机加速曲线设计是否合理。为节省CPU芯片计算加速曲线的运算量,可用Excel表格提前计算完成加速度表格,存入LPC1788单片机内部,方便CPU程序调用。
3 负载自动检测控制算法
假如硬币/票卡扎堆从收集审计器1或收集审计器2出来,那么会若干个硬币/票卡叠加在一起进入皮带传输系统。叠加硬币/票卡数量越多,皮带传输阻力越大。因此,收集审计器1、2需一枚一枚间隔出币,避免硬币堆积,减轻皮带传输阻力。
硬币/票卡通过滚轮或吸卡时,传输阻力明显变大。当通过这两类节点,传输阻力变小。1元人民币硬币直径25 mm,票卡直径30 mm,票卡通过滚轮的阻力比1元硬币通过滚轮的阻力大。为应对传输阻力突发变化,步进电机的最大动态转矩需满足一定要求。步进电机矩频特性曲线显示,随频率升高,电机转矩急速下降。为满足最大动态转矩需求,如步进电机长期工作在低速状态,又面临电机发热严重的问题。
根据电磁感应定理,步進电机输出转矩和电机线圈电流成正比。步进电机驱动电路设计完成后,电机线圈充电时间常数保持不变。如电机驱动脉冲频率高,则电机线圈充电时间短,产生的转矩小,同时发热量也小;反之亦成立。当电机负载小时,转速高、转矩小、发热量小。当电机负载大时,转速低、转矩大、发热量大。为解决步进电机发热问题,皮带传输效率及传输阻力突变,需自动控制步进电机转速及转矩。
经测试,当步进电机最低转速为3 r/s时,转矩可满足皮带传输中最大的负载传输。假设步进电机同步带轮R=0.01 m,则皮带传输最低线速度V=W*R=3*2*3.14*0.01=0.188 4 m/s≈0.2 m/s,其中W为角速度。在5.0 s内,可让大负载传输离开该节皮带。
如图9所示,将从步进电机升速/降速过程分成N步。每隔100.0 ms检测步进电机是否失步。假如失步,则降速一步;假如升速过程未失步,则升速一步;如已升速至最高速度,则步进电机保持最高转速;假如降速过程未失步,则认为当前电机转矩与负载大小基本平衡。此时转矩维持5.0 s,避免频繁调速。假如降速过程检测电机过流,则电机停机并报错。
4 结 论
综上所述,针对皮带传输中的阻力突变现象,巧妙利用步进电机矩频曲线特性,通过负载自动检测控制算法,实现皮带传输自适应负载突变,满足自动售检票系统关键模块专用检测装置对硬币/票卡传输的性能要求。以后,从步进电机PID闭环控制,改善电机动态响应角度入手,提升皮带传输性能。
参考文献:
[1] 徐煜明.步进电机速度控制的研究与实现 [J].工矿自动化,2007(2):82-85.
[2] 薛承基.电机传动系统控制 [M].张永昌,李正熙,等译.北京:机械工业出版社,2013.
[3] HAKAN G.工业运动控制:电机选择、驱动器和控制器应用 [M].尹泉,王庆义,等译.北京:机械工业出版社,2018.
[4] 阮毅,杨影,陈伯时.电力拖动自动控制系统 运动控制系统 [M].北京:机械工业出版社,2016.
[5] 陈白宁,段智敏.机电传动控制 [M].沈阳:东北大学出版社,2015.
[6] 李海波,何雪涛.步进电机升降速的离散控制 [J].北京化工大学学报(自然科学版),2003(1):92-94.
[7] 陈爱国,黄文玲,杨红红.步进电机升降速曲线的研究 [C]//中国电工技术学会.第11届全国电气自动化电控系统学术年会论文集,2002:311-313.
[8] 刘亚东,李从心,王小新.步进电机速度的精确控制 [J].上海交通大学学报,2001(10):1517-1520.
作者简介:薛红昌(1983-),男,汉族,山西临汾人,就职于AFC开发二部,硬件工程师,电子技术工程师,2007年毕业于长江大学,工学学士,研究方向:自动售检票系统研发、硬币模块、TOKEN模块、票卡模块研发。
