基于DTW距离的拖拉机传动轴载荷样本长度计算方法
2020-07-25尹宜勇付宁善宋正河
尹宜勇,付宁善,廖 频,宋正河
(中国农业大学现代农业装备优化设计北京市重点实验室,北京 100083)
0 引 言
载荷谱编制是疲劳寿命分析和疲劳可靠性试验的关键环节[1-3],其中载荷样本长度的确定是编制载荷谱中的关键步骤[4-5]。拖拉机田间工作时,传动轴向转向驱动桥传递动力,其是影响拖拉机整机性能的重要因素[6]。因此,以拖拉机传动轴为研究对象,确定载荷样本长度,对编制拖拉机传动轴田间作业工况下的载荷谱具有重要意义。
工程领域确定载荷样本长度的方法主要有近似均值精度估计法、曲线拟合法[7-8]、疲劳寿命法[9-10]以及基于贝叶斯算法的载荷样本长度计算方法[11]。由于农业机械作业环境复杂开放[12]以及地块大小的影响,农业机械所受载荷波动较大且工作阶段占比会发生变化,使载荷的统计特征发生较大变化,而近似均值精度估计法和曲线拟合法主要依靠数据统计特征进行载荷样本长度的计算,因此会有较大误差;疲劳寿命法的计算结果会因疲劳理论与载荷本身特点的不同而产生较大差异[13];载荷均值服从混合分布[14],使贝叶斯算法计算精度较低。
载荷谱本质上是反应整机结构或关键零部件受载情况的载荷时间历程[15-16],而确定载荷样本长度是选取能够代表总体载荷特征的最短载荷时间序列,所以确定载荷样本长度可认为是对载荷时间序列相似性程度的度量。动态时间扭曲(DTW, Dynamic Time Warping)距离主要应用于语音识别和在线签名验证领域[17-19],是对于时间序列数据特征相似性度量的一种方法[20],其能够进行不等长时间序列相似性判别、运用特征匹配进行相似性判断[21],能够确定载荷样本与载荷总体相似性程度且受载荷统计特征的影响较小。
鉴于DTW距离方法的特点,本文针对工程领域载荷样本长度计算方法在农业机械领域存在的问题,提出一种基于DTW距离计算载荷样本长度的方法。以拖拉机传动轴载荷为研究对象,获得拖拉机犁耕时传动轴的田间动态载荷数据,并根据犁耕作业特点进行作业工况划分,运用DTW距离计算载荷样本长度,并运用参数外推中的均值服从混合正态分布的拟合参数相对误差进行检验,验证基于DTW距离载荷样本长度计算方法的适用性。
1 基于DTW距离的载荷样本长度计算
1.1 DTW距离基本原理
DTW距离是将时间序列拉伸或收缩来进行对应相似点距离的累加[22-23],是评价时间序列特征相似性的一种方法,基本原理如下。
选取2个时间序列S1(i)、S2(j),长度分别为r、s,由这2个时间序列建一个r×s的矩阵,则这2个数据序列上任意两点之间的DTW距离为:

式中d(i,j)为序列点S1(i)和S2(j)间的距离(一般为欧氏距离 ) ; γ (i- 1 , j - 1 )为 从 元 素 (S1( 1),S2(1))到 元 素(S1(i- 1 ),S2(j- 1 ))间的最小累计距离;γ(i- 1 ,j)为从元素(S1( 1),S2(1))到元素 (S1(i- 1 ),S2(j))间的最小累计距离;γ(i,j- 1 )为从元素 (S1( 1),S2(1))到元素 (S1(i),S2(j- 1 ))间的最小累计距离;γ(i,j)为从元素 (S1( 1),S2(1))到元素(S1(i),S2(j))间的最小累计距离。
1.2 计算流程

图1 基于DTW距离确定载荷样本长度流程图Fig.1 Flow chart for determining the load sample size with Dynamic Time Warping (DTW) distance
DTW距离是运用动态时间规划的方法,将时间序列特征进行匹配,从而进行相似性判别,不参照数据的统计特征,因此,针对农业机械的载荷样本长度计算较为适用。应用基于DTW方法进行载荷样本长度的计算流程如图1所示。随着子样本个数的不断叠加,载荷时间序列中样本点的个数会增加,会造成两载荷时间序列之间的DTW距离增大,为保证不同子样本个数载荷时间序列的DTW距离处于同一评价标准下,按照式(2)对不同样本点数量的载荷时间序列进行归一化处理。

式中S(i)为原时间序列;Smax为原时间序列当中的最大值;Smin为原时间序列当中的最小值;Ns为原时间序列中样本点数量;S′(i)为归一化后的时间序列。
将x个子样本经归一化处理之后得到的样本载荷序列 (x1,… ,xi, … ,xm) 与 归 一 化 后 的 总 体 载 荷 序 列( y1, … , yj, … , yn)数据点构建一个n×m距阵,之后计算样本载荷数据点xi与总体载荷数据点yj之间的欧氏距离,并放入矩阵中点(i,j)处。然后根据式(1)计算样本载荷序列与总体载荷序列之间的DTW距离。计算时应该注意 DTW 距离的计算应该从矩阵单元的成对角的起始点处开始和终结点处结束,并保证经过的路径连续、单调,使样本载荷序列和总体载荷序列的特征相对应,获得两者之间的最短距离。
得到距离之后,选取给定的误差εr,将子样本不断累加并与载荷总体y进行DTW距离d的计算,若子样本累加到使d小于εr,则输出子样本数量,从而确定出合适的载荷样本长度。
2 拖拉机传动轴载荷数据测试及分析
2.1 扭矩信号获取
由于田间道路的路面不平度较高,拖拉机整机振动明显,而且传动轴需要高速旋转,因此,扭矩采集系统需保证方便安装并具有一定的抗振性能。本试验采用北京必创公司生产的TQ201型无线扭矩节点进行扭矩信号测取,其具有一定抗振性能,且体积较小、安装方便。将无线扭矩节点、BF350-3BA型半桥应变片、配套无线接收器、供电单元以及笔记本共同构成无线扭矩采集系统采集传动轴扭矩,其中无线扭矩节点布置如图2所示。
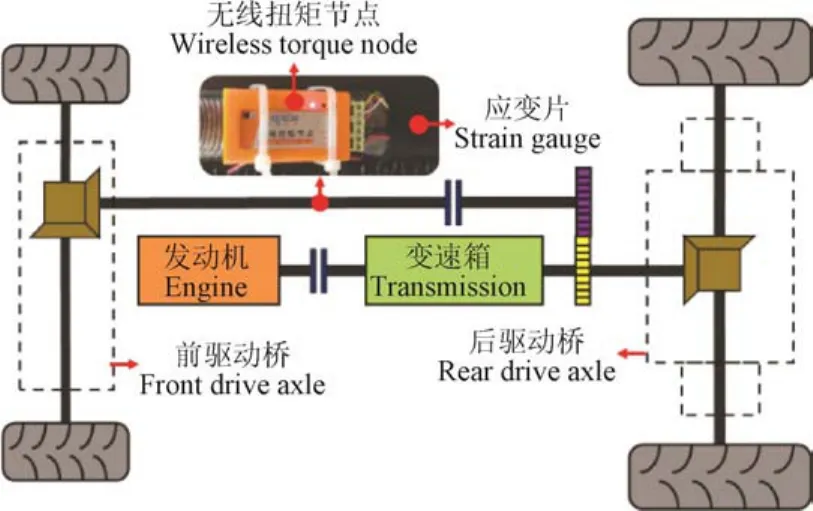
图2 无线扭矩节点布置Fig.2 Arrangement of wireless torque node
试验时间为2018年10月,试验地点为河南省洛阳市孟津县金村,选取面积约13.3 hm2,长度约为170 m,玉米收获完成后的农田为试验场地进行犁耕作业,土壤表面玉米秸秆留茬高度约为10 cm,土壤种类为沙土。按照犁耕标准[24]对拖拉机犁耕工况下的作业环境和作业质量进行检测,测得环境温度为25.6 ℃,环境湿度为21%,风速为4.6 m/s,犁耕作业幅宽为2.1 m,耕深为320 mm,犁耕后的碎土率为99.2%,经检验作业质量符合国家标准。
犁耕过程中拖拉机挡位为中三挡,速度为 0~10 km/h,拖拉机田间犁耕作业如图3所示。选取采样频率为100 Hz,在进行扭矩信号采集时,为了提高采集系统精度,采集过程中运用巴特沃斯滤波的方式对数据进行抗混叠滤波,降低环境带来的干扰,故不需要再对载荷时间序列进行预处理。测取犁耕作业过程中拖拉机传动轴扭矩的变化如图4所示。

图3 拖拉机田间犁耕作业Fig.3 Tractor ploughing in the field

图4 拖拉机传动轴犁耕作业扭矩信号Fig.4 Torque signal of tractor drive shaft during ploughing operation
2.2 扭矩信号分析
无线扭矩采集系统测取的载荷信号为扭矩信号,为方便后续分析处理,将扭矩载荷转化为切应力载荷τ(MPa)。

式中 WP=/16为抗扭截面系数;da为传动轴直径,取30 mm;M为传动轴所受扭矩,N⋅ m。
为使试验田犁耕完整,拖拉机在地块边界需进行姿态调整,由于此时变速箱向转向驱动桥传递动力较小,且前进方向、挡位发生多次变化,所以此时传动轴所受的切应力较小且有较大波动;在犁耕作业过程中,变速箱向转向驱动桥传递动力较大,但拖拉机状态相对平稳,所以传动轴承受的切应力较大且较平稳。由于拖拉机在犁耕作业时和土地边界调整时传动轴扭矩载荷特征差异明显,为使犁耕作业满足各态历经性,使测量的载荷能够代表田间作业情况下载荷总体特征[25],将犁耕工况与调整工况两种工况划分为一个作业循环。拖拉机进行一个作业循环传动轴受到的切应力如图5所示。
为分析传动轴扭矩频率变化范围,应用Matlab软件进行频谱分析,结果如图 6所示。分析可知,拖拉机传动轴受到的载荷主要是低频信号,而由于农业机械作业的地面环境较为恶劣,传动轴受到地面和变速箱的激励,使得载荷的幅值在0.01和2 Hz附近有2个峰值。
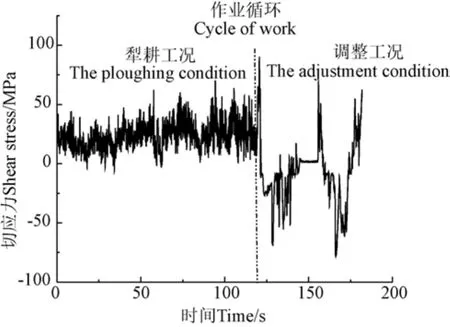
图5 作业工况划分Fig.5 Division of operation conditions

图6 载荷频域分析Fig.6 Analysis of load frequency domain
在作业循环中调整工况占的比例较小,且会因为驾驶员驾驶习惯以及土地边界的变化造成调整阶段占比发生变化。选取前4个作业循环进行分析,结果如表1所示。调整工况相比犁耕工况载荷波动较大,这会使得每个作业循环的统计特性变化较大,造成传统近似均值精度估计法和曲线拟合法对于拖拉机传动轴载荷样本长度的计算适用性较差。
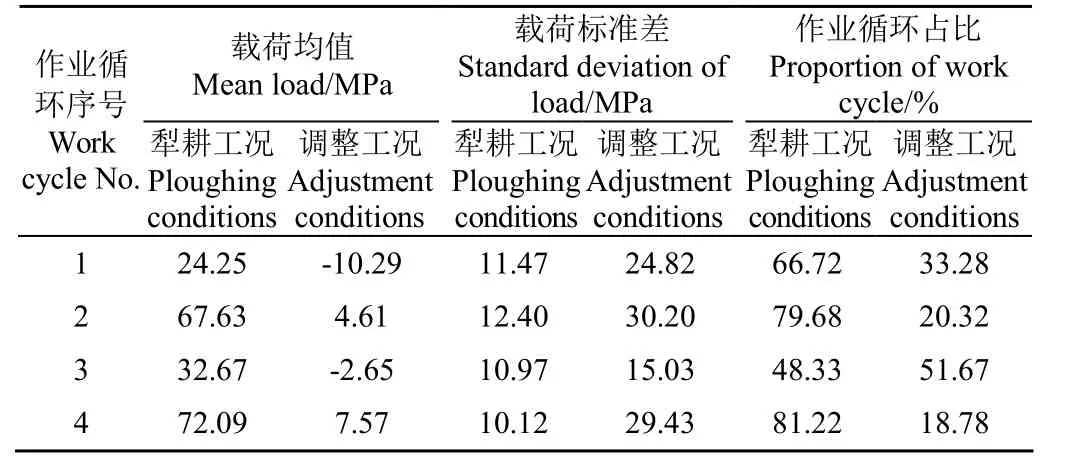
表1 前4个作业循环统计分析结果Table 1 Statistical analysis results of the 4 cycles of work
3 实例分析
将一个作业循环作为一个子样本,选取同一地段连续犁耕作业 20个子样本长度的载荷时间序列为分析对象,时间长度为3 225 s。
由于小载荷循环对于零部件疲劳损伤的贡献较小,一般可将低于最大载荷循环 10%的小载荷循环滤除[26],使用nCode软件将小载荷循环滤除。
只有载荷时间序列满足平稳性检验和各态历经性检验,才能用载荷样本代替总体[25]。经验证,所测量犁耕状态下传动轴扭矩通过ADF(Augmented Dickey-Fuller)单位根检验,符合平稳性,并且每个作业循环包括犁耕工况和调整工况,包含作业全过程,符合各态历经性要求,因此,能够代表载荷总体进行载荷样本长度的计算。
3.1 近似均值精度估计法确定载荷样本长度
根据统计误差的定义,再结合样本长度与统计误差εr的函数关系,选取载荷均值为样本,得到置信度为95.4%下,估算载荷样本长度的公式为[25]:

式中S(x)为载荷样本标准差,MPa;为载荷样本均值,MPa;N为相互独立的子样本个数;x为不同子样本个数的载荷均值,MPa。
逐渐增加子样本个数,得到不同子样本个数的载荷均值如图7所示。一般选取误差εr为0.1[27],计算得到S(x)为6.511 MPa,为48.57 MPa,由式(4)得N=7.19,取N为8,即由近似均值精度估计法得到的最少子样本数量为8。

图7 载荷均值曲线拟合Fig.7 Fitting Curve of mean load
3.2 均值曲线拟合法确定载荷样本长度
由图 7可知,不同子样本个数的载荷均值大致符合函数x=aNb+c,运用非线性函数x=f(N)拟合,在 95%置信水平下得到a=-27.66,b=-2.231,c=50.58,拟合优度R2为0.9034,拟合效果良好。当子样本个数N趋近于无穷时,载荷均值极限值x∞=x= 5 0.58 MPa 。根据中心极限定理,采样容量N>4,就可认为子样均值抽样分布接近于正态分布,取置信水平为 95%,得到均值估计的置信区间为

计算得到载荷均值的置信区间为[45.527,51.621],x∞位于区间内,证明了极限x∞作为载荷均值总体参数的准确性。
获得载荷均值总体参数后,同样选取误差εr=0.1,由式(6)可得载荷子样本个数

经计算得N为2.061,取N为3。即由载荷均值曲线拟合法得到的最少子样本数量为3。
3.3 基于DTW距离确定传动轴载荷样本长度
将20个子样本的载荷时间序列经过归一化处理作为总体。计算经归一化处理后不同子样本个数的载荷序列与总体的DTW距离,得到结果如图8所示。由于农田作业环境复杂开放,使拖拉机在进行犁耕作业时每个作业循环传动轴载荷会有所差异,会出现如5个子样本、6个子样本与总体之间的 DTW 距离随子样本个数增多变大的情况。但总体来看,当子样本个数不断增加时,载荷时间序列与总体之间的DTW距离越来越小,表明样本载荷与总体的相似性程度越来越高。
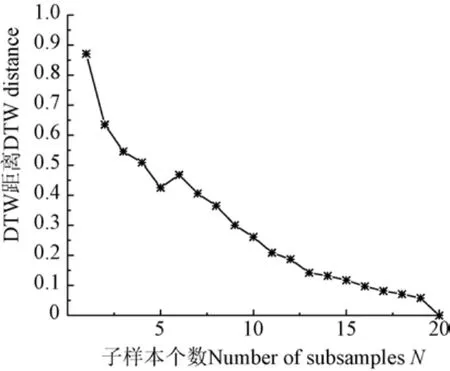
图8 不同子样本个数载荷序列与总体载荷序列的DTW距离Fig.8 DTW distance between load sequences of different number of sub-samples and total load sequence
为保证载荷样本长度保持合适精度,并与传统方法精度相同,选取DTW距离为0.1,由图8可知,确定载荷样本长度为16个子样本。
3.4 载荷样本长度验证
目前针对载荷样本长度的验证方法主要是对载荷的统计特征进行验证,没有考虑载荷均幅值及其频次,会对载荷外推产生影响,进而影响载荷谱编制精度。
在载荷外推中,通常采用参数外推进行载荷均幅值的频次外推[28-29],其实质是获得载荷均幅值联合分布函数,其中对载荷均值及其频次采用混合正态分布进行拟合是关键步骤。因此,为保证载荷谱编制精度,本文以载荷均值及其频次服从混合正态分布函数为依据[14],进行载荷样本长度的验证。
将子样本个数不断叠加得到的载荷时间序列进行雨流计数法计数,然后对每个载荷时间序列的均值划分为64级[30-31]。为简化求解过程,降低参数复杂度,本文采用双正态分布函数进行载荷均值及其频次拟合,拟合函数如式(7)所示。

式中λ1、λ2为拟合系数;μ1、μ2为双正态分布数学期望;σ1、σ2为双正态分布标准差。
为保证拟合参数真实有效,在置信水平为 95%且保证拟合优度大于0.9的前提下,采用Trust-Region方法将不同子样本个数的载荷时间序列进行双正态分布拟合,选取 20个子样本载荷时间序列拟合之后的参数为参考值,计算由不同载荷样本长度计算方法得到的载荷样本长度对应的均值及其频次双正态分布参数的相对误差,以此对不同载荷样本长度计算方法进行对比(表2)。

表2 载荷样本长度计算方法对比Table 2 Comparison of load sample size calculation methods
由表 2可知,由近似均值精度估计法和均值曲线拟合法得到的载荷样本长度使得参数拟合外推中的均值及其频次双正态分布拟合参数相对误差最大值分别为126.06%和80.62%,而基于DTW距离计算方法的拟合参数相对误差最大值为5.43%,并能够保证拟合参数相对误差均小于10%,验证了基于DTW距离的载荷样本长度计算方法的适用性。
4 结 论
1)按照拖拉机传动轴犁耕作业下载荷特性将拖拉机犁耕时作业工况和调整工况作为一个完整的犁耕作业循环,使载荷满足各态历经性要求。
2)基于DTW距离进行载荷样本长度的计算。为排除样本点个数对于载荷距离的影响,将载荷进行归一化,将载荷样本不断叠加的载荷时间序列与总体进行 DTW距离的计算,选取DTW距离为0.1,确定载荷样本长度为16个子样本。
3)基于参数外推当中均值及其频次服从混合正态分布进行载荷样本长度验证。由近似均值精度估计法和均值曲线拟合法确定的载荷样本长度的拟合参数相对误差分别为126.06%和80.62%,而基于DTW距离方法确定的载荷样本长度使拟合参数的相对误差为5.43%,从而验证了基于DTW距离的载荷样本长度计算方法的适用性。
