高压输电线路除冰防冻机器人设计
2020-07-24谢晓全张晓龙梁文凯杨磊青高鹏
谢晓全 张晓龙 梁文凯 杨磊青 高鹏

摘要:为了解决我国西南山区高压输电线路覆冰问题,在总结和分析国内外现有除冰技术基础上,以强力除冰、有效防冰为目标,提出“除冰为主,除防结合”的新型除冰、防冰理念。应用模块化设计,对机器人整体架构、本体机构、除冰机构、防冻喷涂机构以及控制系统进行详细设计说明,对机器人关键零部件进行有限元分析。结果显示,该除冰方案结构设计合理,适用于西南地区高压线缆除冰、防冰工作。该机器人具有结构紧凑、重量轻、简单高效、实用性强等特点,为输电线路除冰、防冻提供了一种新思路,具有较好的社会效益和应用前景。
关键词:输电线路;冰灾事故;除冰防冻机器人
DOI:10.11907/rjdk.192283 开放科学(资源服务)标识码(OSID):
中图分类号:TP319文献标识码:A 文章编号:1672-7800(2020)006-0102-05
0 引言
包括我国在内的世界上很多国家都经常发生高压输电线路冰灾事故。2008年初,冰冻事故给中国西南方人民生产生活带来了深重影响,其中南方电网损失极其严重,中国西南地区高原山区高压输电线遭受到大量覆冰侵害而造成高压线塔倒塌、线路短路,供电工作受到了前所未有的挑战。与此同时,国外包括美国、日本等发达国家在内的很多国家都受到了冰灾事故的严重侵害,线路覆冰已成为亟待解决的问题。
高压线路除冰技术包括热力法融冰、机械法破冰、被动除冰等3类,其中机械除冰法具有安全性高、无伤亡、不需转移负荷和停电的特点而被广泛采用。日本东京技术大学Debenest等设计了一款输电线路自动巡线机器人Expliner,该机器人可实现远程无线操控,在执行巡检任务时可通过调节平衡位置以调节重心,保证机器人行走平稳,但该机器无法完成防冻喷涂工作;中科院沈阳自动化研究所(SIACAS)肖时雨等设计了四臂巡检机器人,该机器人采用尺蠖爬行的行进方式,可以实现越障功能,但该机器人过于笨重,行走不够灵活;加拿大魁北克Quebec研究院的Toth等研制了输电线路巡线装置Line Scout Mobile Platform,该装置除具备一定越障能力外,还具有防水、GPS定位和重心调节等功能,但没有加装防冻喷涂装置;辽宁理工学院高露等设计了一套三臂高压线除冰装置,该装置包括除冰系统、越障系统和行走系统,可通过铣削和敲打实现除冰,但该装置结构复杂,不便于维护。
上述技术方案都是在覆冰形成以后被动除冰,无法防患于未然,而且这些机器人的行走机构多采用将行走轮直接挂靠在线缆上的固定方式,无法适应我国西南山区坡多且陡的地理环境。本文针对我国西南山区的特殊地形和气候条件,设计一款应用于高原山区的输电线路除冰防冻机器人。该机器人除设有行走机构和除冰机构外还增加了防冻喷涂机构,已可对已除冰电缆进行防冻喷涂作业,有效防止电缆二次结冰。该机器人的行走机构采用四轮相对卡紧的结构设计,可以在高地起伏的山区输电线路上平稳攀爬。此外,该机器人具有体积小、重量轻、结构简单和易于维护等优点,适合在线缆覆冰地区推广使用。
1 除冰防冻机器人总体方案
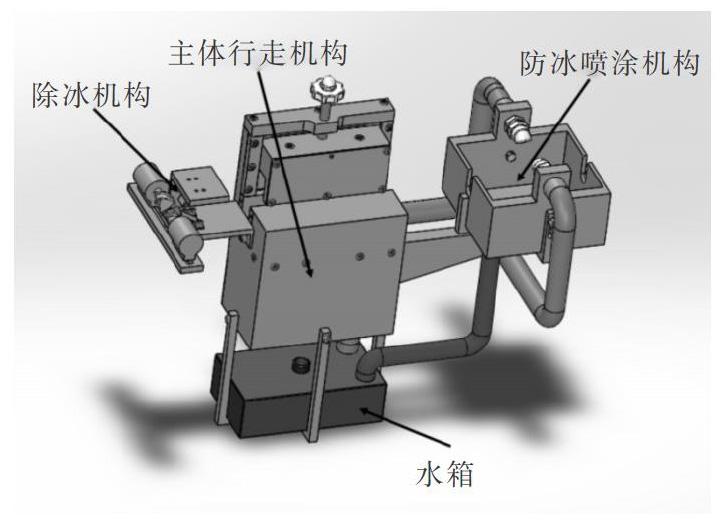
目前,国内外没有方案成熟的除冰防冻机器人,大多数方案都只重视机械除冰,而忽略了除冰完成后对线缆的防冻保护问题。针对此问题,本文设计了一种高压线路除冰防冻机器人。该方案既可以满足对覆冰线路的除冰工作,又可以对已除冰线缆进行防冻喷涂作业,能有效避免输电线路二次结冰。机器人采用模块化设计,组成模块包括主体行走机构、除冰机构、防冻喷涂机构、水箱等。机器人采用SolidWorks进行三维建模,如图1所示。
1.1 主体行走机构设计
国内外主体行走机构常采用两种方式:步进式和滚轮式。对于不作越障要求的巡线机器人,采用轮式滚行式比较普遍,该机构结构简单、行走速度快、制造成本低。结合西南地区山多坡陡的特点,采用轮式行走机构比较合理。
如图2所示,主体行走装置主要包括驱动电机、涡轮、蜗杆、传动齿轮、行走轮等。行走机构由驱动电机提供动力,经涡轮、蜗杆、传动齿轮将动力传递给行走轮,以实现行走机构的前进后退。对比分析国内外现有轮式行走机构,以两轮挂式行走机构居多,三轮、四轮,甚至多轮行走机构也都有出现,考虑到机器人能够满足在西南山区输电线路上行走的稳定性,最终选择四轮轮式行走机构,行走机构上下各两个行走轮,可牢牢卡紧在输电线路上,保证了在西南山区爬坡作业时的稳定性。由于轮子直接与高压线缆接触,因此行走轮应选择绝缘材料,考虑到线缆上有覆冰,轮子容易打滑,应选择摩擦力较大的材料并在滚轮中间开槽。驱动电机选择安装在行走机构的下方,使整个机器重心更加稳定,不易遇风摇摆。
1.2 除冰机构设计
在经过一系列探索对比之后,最终设计了一个以双铣刀和双楔形块组合的除冰方案,具体结构如图3所示。除冰装置主要由两个除冰电机、两个除冰楔形块、一个除冰机构底座、一个楔形块固定面板、两个固定螺栓以及若干连接螺钉组成。
该除冰方案工作原理:除冰机构通过底座与除冰机器人本体连接在一起,与本体行走轮固定在同一条直线上,由于该除冰机構是开放式设计,可使除冰机器人在上线下线时非常方便地从侧边空隙卡人,工作时通过控制启动除冰电机,除冰电机带动除冰刀高速旋转,对高压输电线两侧的覆冰进行铣削式破除,而紧跟其后的两个楔形块在行走机构的推动作用下,实现对垂直方向覆冰的刮铲破除,完成立体式高效除冰。该除冰机构可以通过调节两电机之间的距离调整铣刀与电缆覆冰的距离,并且通过调节上楔形块的间隙调整两个除冰楔形块相对于电缆之间的距离,在保证不损坏输电线的前提下实现对不同直径输电线路的高速有效除冰。
1.3 防冻喷涂机构设计
防冰指在输电线覆冰前采取措施,使冰雪在输电线上不能堆积,将总的覆冰载荷控制在输电线可承受范围内。常用防冰方法有临界法电流防冰、微波防冰、防冰涂料技术等。其中,防水涂料技术能有效降低冰与导线之间的粘附力,故选择在线缆上喷涂防冻涂料的方案较为合适。选择ZS-611防冰雪涂料,该涂料具备很好的憎水性,憎水角可达150°之上,滚动角小于8°,适用于多种方法涂装,能在常温下固化,涂层在30um以下,就能防冰雪附着,并具备抗腐蚀、耐磨损、防老化、表面自洁等功能。
防冻喷涂模块如图4所示,主要由水箱、水箱支架、水泵、喷嘴、药剂回收箱和回收箱支架组成。由于行走机构对输电线路的安装采用嵌入夹紧方法,因此喷头机构设计为部分开口,以便于输电线路能装进喷头弧形部分。喷涂机构工作在架空输电线上,药剂大量洒落不可避免,这不但会浪费药剂,还会污染坏境,故在喷头部分设计一个药剂回收箱,用以回收洒落出来的药剂。喷头部分固定于液体回收箱上部,液体回收箱固定在回收支架上,通过M6的螺钉将回收支架固定安装在主体行走机构上,水箱固定在支架上,水箱支架再经M6螺钉固定在主体行走机构下方,水箱、水泵和回收箱之间用水管相连。防冻喷涂机构工作原理:水泵将水箱内的防冰雪涂料输送给两个喷嘴,喷嘴将防冰雪涂料均匀喷涂在输电线路上,洒落的涂料被回收箱收集,经过回流管道流回水箱。
1.4 控制系统设计
该方案采用半自动控制方式,遥控器采用5通道,分别控制铣刀启停、行走电机启停、喷涂水泵开关、四轮夹紧机构开合以及自救系统启停。详细说明如表l所示。
方案主要以89C51/52或ATMEL64/128为基本控制芯片,外加无线接收芯片为辅助模块。主控芯片和其辅助电路将无线接收芯片的数据进行转换、解析,以便控制电机、水泵等机构作出相应动作,从而完成对除冰防冻机器人的逻辑控制。机器人控制流程如图5所示。
2 关键零部件有限元分析
本文利用有限元分析软件ANSYS Workbench对除冰机器人的关键零部件进行受力变形有限元分析,并对结构中存在的不足进行优化设计。
2.1 行走轮有限元分析
除冰机器人在高压输电线上行走时,4个行走轮夹紧电缆线同时转动,假设行走轮和电缆线之间不发生滑动摩擦,忽略齿轮传动效率,4个行走轮的转矩一样,但在实际运动中,离电机最近的那个轮受力最大,只要此轮能满足设计要求,其它轮均能满足要求。
行走轮采用45钢材料。45钢密度为7.8x 103kg/m3,泊松比为0.3,弹性模量为2.1x 1011pa,先输人材料各参数,再导人零件,进入模型界面后,对行走轮进行网格划分,网格大小尺寸默认,对行走轮进行约束,施加作用力,该行走轮受到的力主要是电机输出的扭矩,对行走轮进行有限元分析,得到行走轮的形变和应力图。如图6所示,最大形变量为0.0014mm,最大应力为9.65Mp。对比材料弹性模量参数及实际工作情况,分析结果表明,行走轮能满足强度要求。
2.2 除冰机构楔形块有限元分析
除冰机构楔形块的材料采用45钢,对该零件的主要受力部位(楔形块)的刀头施加大小为500N的力,运用ANSYS对除冰机构楔形块进行分析,具体情况如图7所示。
通过形变图可以看出,该除冰机构楔形块的最大应变为0.57911mm,小于0.8mm,因此在形变方面,此方案可行。从应力图中发现,除冰机构楔形块受到的最大应力仅为6245.4MPa,小于其材料45钢的屈服强度,因此该零件符合设计要求,可以承受预想的最大受力情况,方案可行。
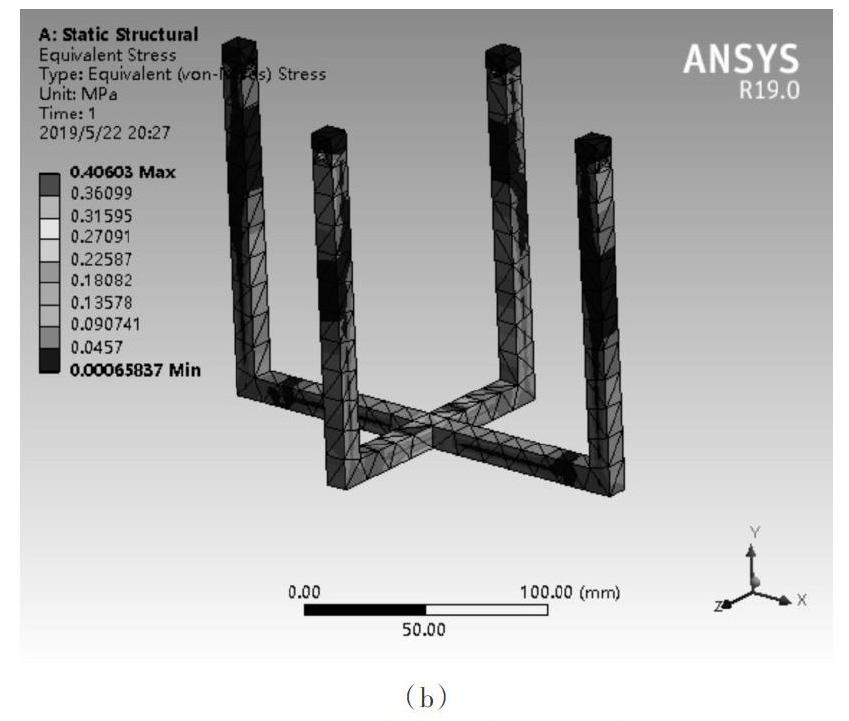
2.3 水箱支架有限元分析
分析水箱支架受力情况,需要先算出支架所要承受水箱重量以及水箱放滿液体时的重量。水箱重量为水箱体积乘以水箱密度,通过Solidworks水箱模型可得出水箱体积,在选材时,选择PC塑料水箱,查询PC塑料水箱参数可知该PC塑料味玻纤增强25%,密度1.39g/cm3。1.39g/cm3为1390g/mm3,输入质量属性,得出水箱自身重量为97.89克,水箱装满防冻剂后,根据防冻剂密度1.25g/cm3,得出防冻剂质量为:
m=pV=1.25x440=550g (1)
水箱支架共计承重1197.89g,重量为:
G=mg=1197.89x10-3x9.8=11.74N (2)
水箱体评估如图8所示。
对水箱支架进行有限元分析,如图9所示,得出水箱支架最大形变量为0.004mm,最大应力0.361MPa,都没达到45钢的最大许用应力和形变屈服极限,因此水箱支架满足设计要求。
3 结语
本文在分析国内外现有除冰技术基础上,提出了一种“除冰为主,除防结合”的新型除冰防冰理念,对机器人整体架构、本体机构、除冰机构、防冰喷涂机构以及控制系统进行了详细设计说明。对机器人关键零部件进行有限元分析,结果显示各关键零部件满足强度设计要求。该机器人结构设计合理,适用于西南地区高压输电线路的除冰、防冰工作。但还存在一些问题需要解决,比如整机防水问题和如何增加续航时间问题。目前,正在对除冰防冻机器人作进一步改进,以便机器人能够适应更复杂的工作环境。已除冰线缆防冻喷涂保护问题将成为除冰机器人研究的新方向。
