基于车载信号的列车防撞系统研究
2020-07-22周国军程贵良
周国军 程贵良

摘要:传统铁路运行过程中,线路异物侵限时,列车不具备列车自动防护功能,由司机人工驾驶行车,采用混合行车路权方式,因此存在一定的安全隐患。为了防止列车前方出现障碍物或者前后车之间的距离不足时发生撞击事故,特别在大雾和雾霾天气,为了保证行车的安全,车载信号系统必须具备防撞功能。本文对车载防撞系统的关键技术进行了分析,提出了可行的解决方案,进一步提高了行车的安全性。
关键词:列车;防撞;定位;毫米波雷达
中图分类号:U284.93 文献标识码:A
车载信号系统是列车信号控制的关键子系统之一,主要功能包括安全类功能和非安全类,其中安全类功能主要包括列车定位、列车DMI显示、平交路口信号控制和超速告警;非安全类功能有与车辆控制器交互信息如车速、下一站到站时间等旅客乘车信息。从信号系统的功能特点可知,车载信号系统用不具备自动防护和自动跟踪的功能。但是,当列车前方出现障碍物或者前后车之间的距离很近时,就当前的信号系统而言,不具备自动防护功能,此时如果司机没有采取有效的措施,可能发生行车事故。因此,为了保障列车运行的安全,车载信号系统的防撞功能应运而生。特别在当前雾霾十分严峻的现状下,车载防撞系统的研究迫在眉睫。
1关键技术分析
当列车运行前方一定距离内出现障碍物或前后车距小于安全值时,车载司机显示单元DMI将发出障碍物告警提示,此时司机应当采取制动措施。如果车辆具有鸣笛接口,则车载控制器通过鸣笛向车外发出警示声以提示列车前方车辆或人员。特别地,当发生大雾或者雾霾严重的情况下,该功能辅助司机安全驾驶列车运行。因此,对于车载防撞功能来说,其关键技术为列车定位、障碍物探测和车距的计算。
2列车定位
列车定位方法较多,包括卫星定位、轨道电路、计轴器、感应式通信环线以及RFID电子标签等,但是这些单一的定位方法都存在一定的缺陷和不足,为了保证定位的可靠性和精确度,必须采取组合定位的方案。由于卫星定位基础设施完备,RFID电子便签定位技术成熟且价格便宜,因此采用GPS/BDS+RFID+里程计的组合定位方案实现对列车的定位。采用这种方法定位,不但提高了定位的可靠性,而且具备较高定位的精度和完备性。表1为定位模式切换和选择策略。
其中,“1”代表正常状态,“0”代表故障状态;“A”代表GPS/BDS,“B”代表RFID,“C”代表里程计;“X”代表正线道岔、平交路口以及车站区域,“Y”代表非正线道岔和非平交路口的正线区域,“Z”代表出入段线(地下)。
由表1可知,如果RFID电子便签布置恰當,只有当GPS/BDS定位、RFID电子标签定位和里程计定位三者同时发生故障时,列车才彻底失去定位信息。显然,三者同时发生故障的概率是非常小的,而且一般情况下采取故障报警的措施,一旦任何一种定位方式故障,系统都会报警,及时对其进行维修处理。因此,该组合方案的可靠性和完备性很高。由于采用的是无源RFID电子标签,其内部固化了精确的线路数据,因此精度也有保障。
3障碍物探测
由于列车采用非独立路权模式,其他机动车辆和行人与列车混行,因此在列车运行过程中,其前方经常出现机动车辆、行人及其他障碍物。为了保障行车安全,避免列车与障碍物发生碰撞事故,尤其是在大雾及雾霾严重的情况下,必须在列车上配备障碍物探测装置来探测运行前方的障碍物,一旦障碍物进入危险区域内,车载设备立即报警,司机及时采取制动措施。目前常用的探测技术有雷达探测、红外线探测和超声波探测等。雷达探测全天候好,探测距离精确,抗干扰能力强;红外线探测无精确探测距离,全天候能力差;超声波探测对人体存在一定的危害,不适用于城市人流密集区域物体的探测。选取抗干扰能力强、环境适应性好、分辨率高及更新速度快的毫米波雷达探测方案实现障碍物的探测。
3.1车载防撞系统组成
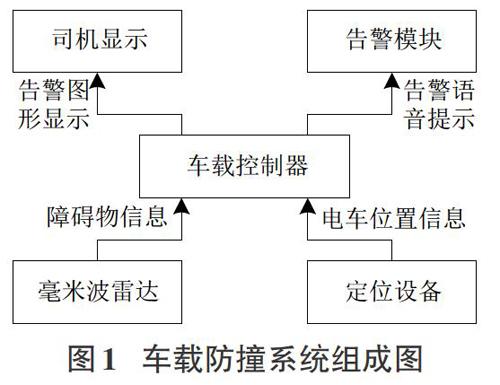
车载防撞系统由毫米波雷达,列车定位设备,车载控制器,司机显示模块和告警模块组成。毫米波雷达完成障碍物的探测,采集外部目标物信息;列车定位设备获取列车的实时位置信息;车载控制器综合处理列车的方向、速度、加速度、位置和障碍物信息,判断出障碍物相对列车的位置;司机显示模块显示来自车载控制器的处理结果,以图形方式给司机给出提示;告警模块实现碰撞发生时的语音报警提示。图1为车载防撞系统组成图。
3.2毫米波雷达工作原理
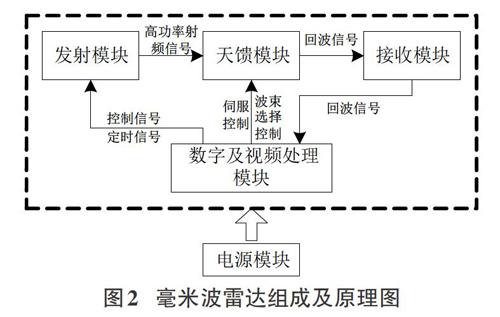
毫米波的波长为1-10mm,具有微波和红外两种波谱的特点。毫米波雷达的角分辨率高、频带宽,具备全天候特性,有利于采用脉冲压缩技术,同时毫米波雷达元器件尺寸小,使得系统的体积比较小。毫米波雷达由天馈模块、发射模块、接收模块、数字及图像处理模块和电源模块等组成,如图2所示。
发射模块接收数字及视频处理模块发送的控制信号和定时信号,产生高功率、低占空比的射频信号。天馈模块包含了毫米波天线、馈线和伺服,接收来自数字及视频处理模块发送的伺服控制和波束选择控制命令,将来自发射模块的高功率射频信号定向辐射到空间,并在接收时收集大面积的回波信号,还可以作为空间滤波器,提供目标物的角度分辨等功能。接收模块对来自天馈模块的射频信号进行滤波、混频、放大和采样处理,最后发送至数字及视频处理模块。数字及视频处理模块形成全机定时信号,为其他各模块形成相应的信号和控制命令,消除通道的零漂,同时进行非相参积累和门限判决,最终提取最近的目标。电源模块为整个毫米波雷达装置提供电源。
3.3障碍物探测流程
毫米波雷达将探测到的目标信号发送给车载控制器后,车载控制器根据本列车的实时运行状态(如速度和加速度)和列车与目标之间的相对距离、角度和速度,以地面为参照物,首先判断目标的运动状态(静止和运动)。如果目标处于静止状态,则需要判断目标是否在发生碰撞事故的范围内,如果是,则确定该目标为障碍物,否则忽略不计。如果目标处于运动状态,则需要计算障碍物和列车运动轨迹,根据目标物轨迹和列车轨迹之间的位置关系(限定范围内相交或者不香交),确定目标是否为障碍物。
一旦系统判断目标为障碍物,车载控制器及时向人机界面发送图文报警信息,为了防止司机工作繁忙或者疏忽造成的提示信息不能及时发现和处理,车载设备同时发出语音报警提示。
4车距计算
列车车载控制器通过速度传感器获取到自身的运行速度,通过定位设备获取并计算出列车的位置和运行方向信息。速度、位置、方向和列车长度信息通过无线通信网络传输给运营调度中心。同时,本次列车通过无线通信网络从运营调度中心获得前方和后方列车实时的运行方向、速度、位置和列车长度信息。进一步通过毫米波雷达探测装置获取前后方列车之间的距离,以上信息经过车载控制器综合计算和分析,如果发现列车前后方间隔小于安全间隔,车载设备应在给定时间内给出报警信息,防止列车发生碰撞事故。
在列车间距计算过程中,假定列车获得的定位信息都为列车车头处的位置信息,主要包含四种情况:前后车同向运行、前后车对向运行、前车同向静止和前车对向静止。假设前车车长为L,安全间隔为So,前车的速度为V1,后车速度为V2。
(1)前后车同向运行
初始状态下:S>So。如图3所示,当V2V1时,后车追踪前车运行,相对速度V相=V2-V1。根据列车获取到的位置信息,前后车间距S=|S1-S2|-L,当S
