基于决策树参数优化算法的人行横道检测
2020-07-18张应征崔国华
张应征, 崔国华
基于决策树参数优化算法的人行横道检测
张应征1, 崔国华2
(1. 湖南工程职业技术学院 信息工程学院, 湖南 长沙, 410151; 2. 华中科技大学 计算机科学与技术学院,湖北 武汉, 430074)
为了使车辆快速并准确地检测出人行横道, 针对车载摄像头获取的路面图像, 提出了一种基于决策树参数优化的人行横道检测方法, 该方法分3个步骤完成: 首先, 通过逆透视变换获得指定区域内的道路俯瞰图; 其次, 通过阈值分割提取出路面白色标线; 最后根据人行横道的特征属性实现检测。其中, 白色标线的提取是准确检测的基础, 因此结合边缘信息与自适应阈值, 改进了分割算法, 并使用决策树优化分割参数。结果表明: 即使在路面光照不均匀的情况下, 改进后的算法分割效果显示良好, 有效提高了人行横道检测率。
人行横道检测; 决策树; 逆透视变换; 自适应阈值
人行横道的检测不仅能提供有用的公路导航信息, 对提高行车安全也有着重要意义。在这个领域已经出现了许多不同的检测方法, 比如使用从边缘点中提取线段的方法, 进而使用RANSAC算法[1]找到一系列符合的候选线段, 最后分析梯度方向完成人行横道的识别, 其中的算法分为2部分: 特征提取, 以及根据特征使用特征因子图对候选目标进行分类;人行横道标记像素提取, 既而使用连通区域完成检测, 最后在逆透视之后的图像中标出人行横道的位置。这些方法大多是在原图中提取出一系列的候选线段, 然后根据人行横道的特征建模, 判断候选线段是否位于人行横道上; 或是找出由多条等间隔平行线组成的结构, 即视为人行横道。由于对边缘线段的提取均在原图上进行, 很容易受到路面上其他景物的影响; 另外, 根据线段进行检测, 丢失了人行横道长宽比属性, 因而导致人行横道检测方法均较为复杂。
本文提出一种更为便捷的检测方法, 能有效提高路面光照不均匀及阴影情况下的人行横道检测率。首先使用逆透视变换将检测区域设定在一定范围内, 再结合边缘信息与自适应阈值提取出地面标志二值图, 最后对长条形地标作为候选目标进行分组, 从而实现人行横道的检测; 同时通过改进自适应阈值的计算方法、优化决策树的阈值参数, 获得了良好的分割效果。
1 逆透视变换

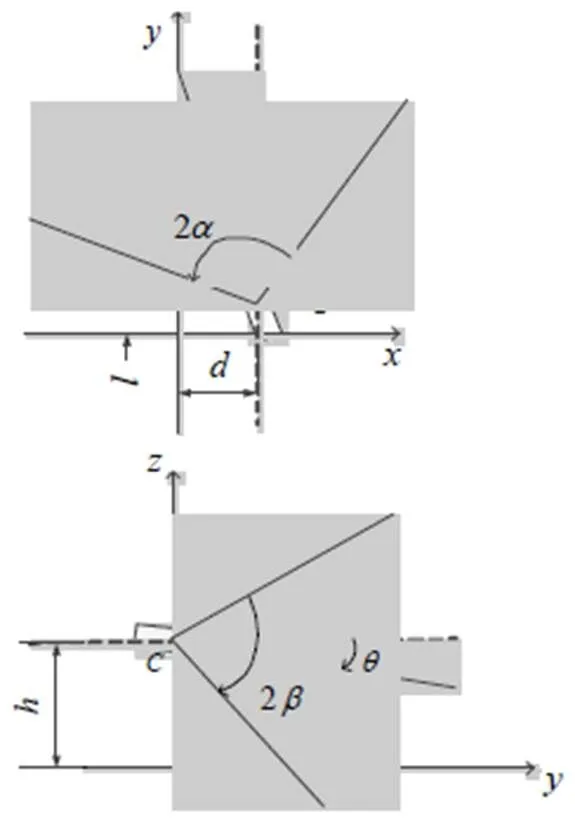
图1 逆透视变换示意图

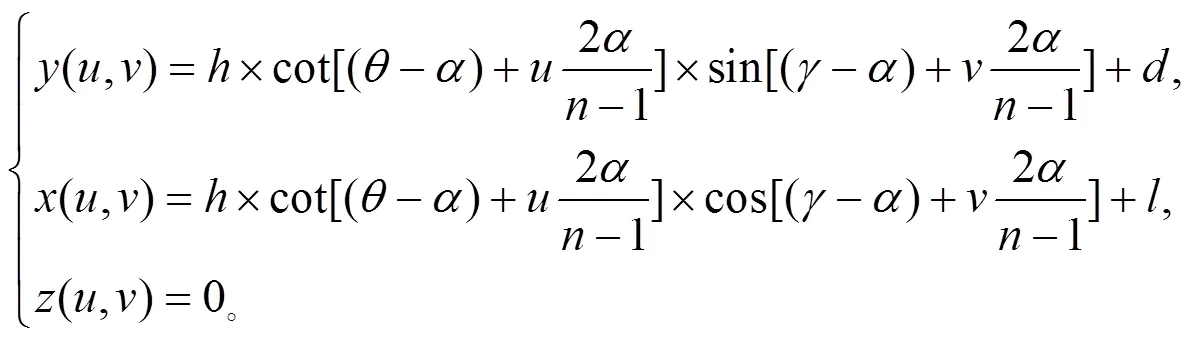
获取以上参数后, 由式(1)设置需要逆透视变换的路面区域, 可将路面原图映射为一定范围内的路面鸟瞰图, 道路图像逆透视的效果如图2所示。
2 阈值分割提取地面标志
图像分割是图像处理研究最为广泛的问题之一。大致可分为全局阈值和局部阈值2大类, 前者通常使用一个固定值来分割图中的像素, 将其置为黑色或白色[4]。全局阈值方法在光照不均匀时会导致分割不完全, 而自适应阈值方法对于每个像素都会通过计算得出一个变化的阈值, 从而将前景中有用的目标从背景中分割开来。因此, 这种方法对于强光照或反射不均匀的情况非常有效。
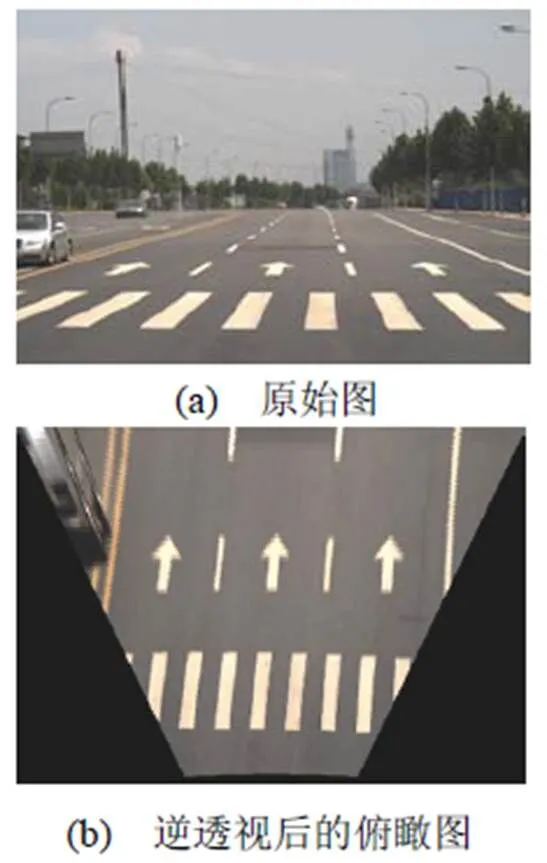
图2 逆透视结果
2.1 引入边缘信息的自适应阈值
使用Canny算子来进行边缘检测, 其具有信噪比大、检测精度高的特点, 主要通过以下3个步骤完成: 首先通过高斯滤波对图像去噪; 接着对平滑灰度图求出梯度幅值及方向; 最后使用高低2个阈值对梯度图进行非极大值抑制, 获取边缘[6]。
边缘提供了一个目标和背景的分界线, 因此将边缘像素点视作该点附近区域的一个阈值参考点。即在使用自适应阈值方法时, 将边缘点的权值设置得高于其他像素点的权值。自适应阈值公式为

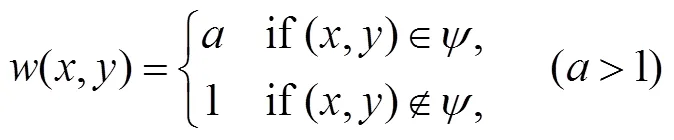
选择合适的邻域大小非常重要, 如果区域选择过大, 则和全局阈值有着类似的缺点, 受到过多的亮度梯度影响, 得到的阈值往往导致图片分割不完全。但如果区域选择过小, 则会由于没有包含足够的前景和背景信息像素, 同样不能获得较好的阈值。
2.2 改进自适应阈值的计算方法
自适应阈值方法需要计算像素点邻域内所有像素的加权平均。为了提高计算速度, 可通过使用积分图, 快速计算一定像素区域内的加权和。如图3(a)所示, 矩形框内的像素加权和即可通过公式(+++)-(+)-(+) +得到[7]。因此,计算并存储每个像素位置的卷积和(,), 即像素(,)所有左方和上方像素灰度值(,)的和, 则一定区域内的像素和

由式(4)计算获得。因此式(2)中自适应阈值的计算可简化为求取一定区域内的灰度图加权和以及像素权值和即可。


图3 区域内加权和的算法改进
图3演示了引入边缘信息后的自适应阈值计算方法。3(b)为一幅简单的输入灰度图; 3(c)为像素的权值, 假定非边缘像素权值为1, 边缘像素的权值为2(即= 2); 将输入灰度图乘以相应的权值, 并获取其卷积结果, 如3(d)所示; 3(e)为边缘权值信息的卷积结果[8]。通过图3(c)、(d), 可根据式(5)快速求得任一区域内的自适应阈值。
2.3 总体阈值分割方法
逆透视处理后的路面分割方法分如图4所示的步骤完成。
(1) 通过Canny算子检测边缘: 针对不同环境设置非极大值抑制的高低两阈值, 获取良好的边缘检测效果。滤除伪边缘: 将过小的边缘视作碎片滤除。


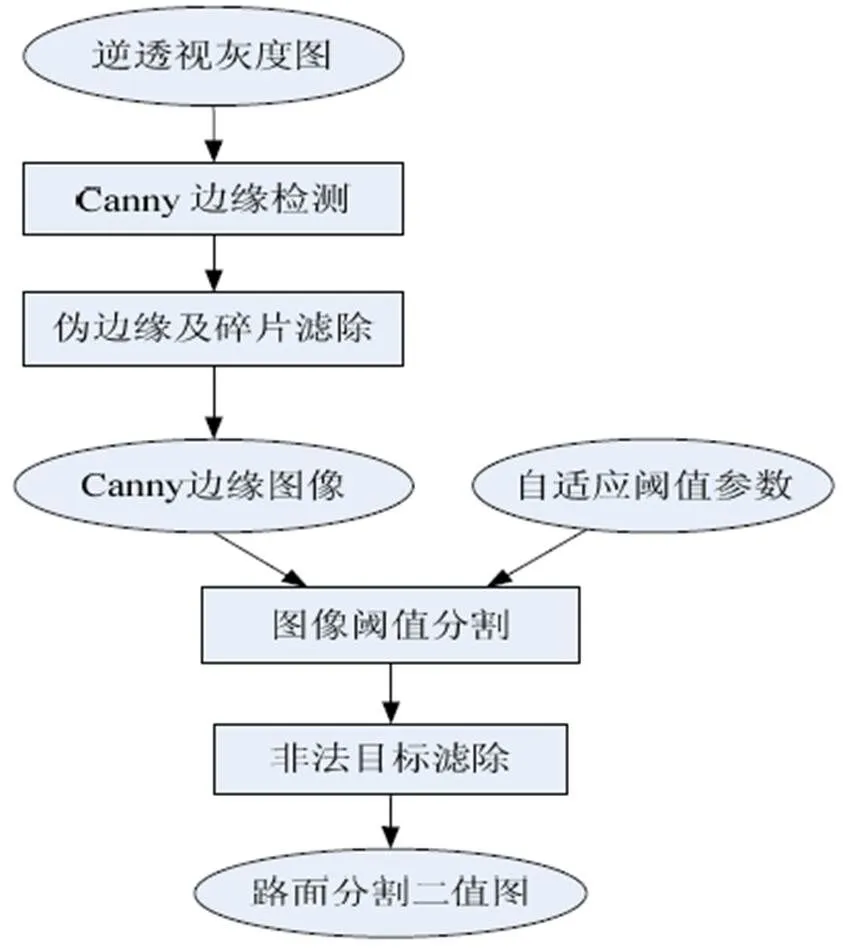
图4 综合阈值分割算法流程图
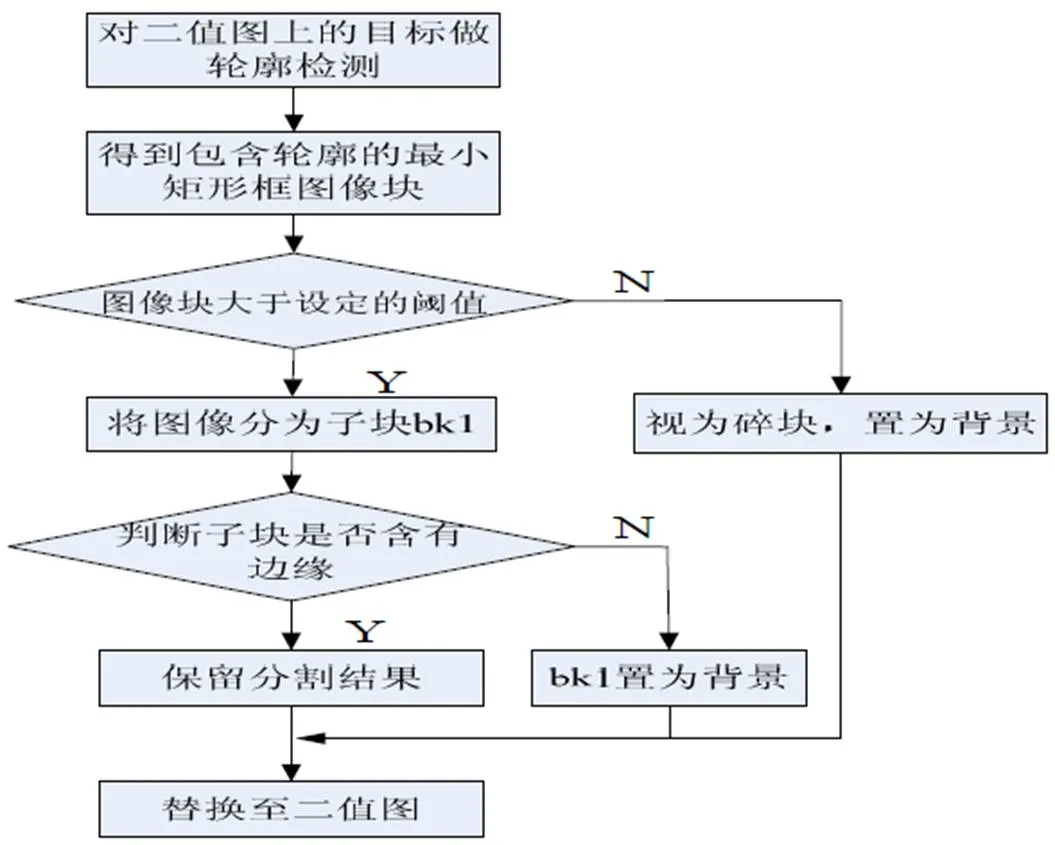
图5 杂质滤除流程图
3 基于决策树的阈值参数优化
为了准确的提取使得后续的检测便捷而可靠, 利用数据挖掘中的决策树算法进行分割参数的优化。
3.1 建立决策树模型
选取阈值分割方法中的邻域大小、常值、边缘像素的权值, 以及分块时的分块大小这4种参数作为特征属性向量, 分别记作A(= 1, 2, 3, 4), 分类属性的类别设置为1对应着所需白色标线提取率大于90%, 光照不均匀产生的杂质大于5%;2对应着提取率大于90%, 光照产生杂质小于5%;3表示提取率小于90%且杂质小于5%,4则是提取目标小于90%, 且杂质大于5%。当满足2类别时, 默认此组参数的配置符合期望的分割效果。
选取历史参数数据提取为训练数据集, 计算各参数特征属性的增益率, 从根节点开始选择各个节点以哪个属性作为分裂属性[9]。建立决策树模型之后, 对决策树进行剪枝、评估, 得到最终的决策树模型如图6所示, 从而进行评估分割效果。

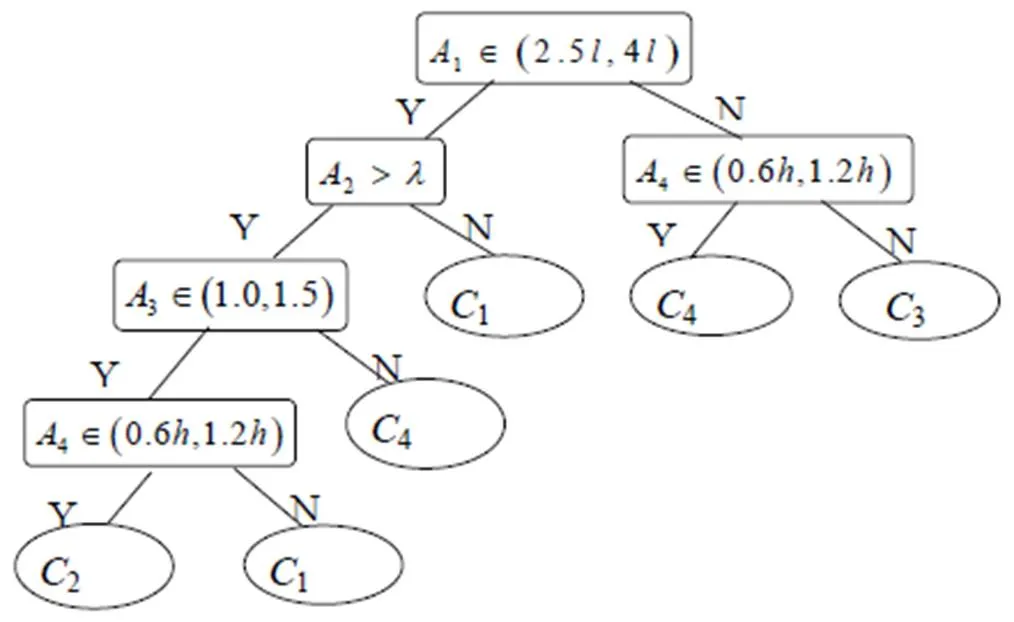
图6 本案例建立的决策树模型
3.2 参数自学习
采用BP神经网络进行参数自学习, 可将其分为2个阶段: 训练阶段和使用阶段[10]。
训练阶段, 对每1幅样本执行分割算法。依据预测分支中的规则, 在参数选取区间内调整参数, 直到得到最佳分割效果。图像的32个灰度级的直方图, 图中斑马线的宽度与长度作为神经网络的输入, 最佳参数作网络的期望输出, 依次输入训练样本, 进行迭代训练。当网络收敛时, 所需的参数选择知识即以权值的形式存储于BP神经网络之中。使用阶段, 可以使用该BP神经网络进行参数自学习, 获取逆透视图像的灰度级直方图, 找出斑马线的宽度、长度, 以及提取目标与背景的最小对比度, 将其作为图像特征输入神经网络, 即可输出该图片的合适分割参数。
4 人行横道检测
经过逆透视和阈值分割步骤的处理, 路面上白色的标线已成功提取至二值图。加之逆透视变换后的俯瞰效果使得人行横道显示更为直观, 根据人行横道的特征简捷的实现检测, 可按以下步骤完成:
(1) 轮廓分析: 遍历二值图做轮廓检测, 分析各前景目标的轮廓形状, 通过设定目标的长宽比和面积, 滤除噪声及非长条地标信息。将剩下的长条地标标记为候选目标, 计算其长边斜率, 以及重心位置;
(2) 候选目标分组: 根据人行横道是由多条平行白色长条组成的特点, 将目标长边的斜率相近, 且重心约在一条直线上的候选目标归为1组, 每组记作X= {1,2, …,x}。其中使用Hough变换判断重心点是否在同一直线上;
(3) 考虑候选目标的位置关系: 计算组内的目标间隔, 将距离不满足设定阈值的长条目标移除;
(4) 标出人行横道: 完成上述3个步骤后, 若每组内依旧有5个以上的平行等间隔长条目标, 则将该组合X认为是1个人行横道, 同时在二值图上用白框标出;
此外, 考虑到前方车辆经过人行横道时产生遮挡, 在实际应用中应将第3步中的阈值适当放宽。
5 实验和结果分析
实验图片由1个安装于车体前方的相机在城区采集获得, 相机在车体坐标系中的位置= (0,-0.52, 1.67) 。相机光轴和轴的夹角= 0°, 与地面的夹角= 11.6°, 相机的水平视角和垂直视角分别为2= 68.67°和2= 48.0°。选取原始图像中车体左右各8 m, 前方5~35 m的区域进行逆透视变换, 变换后的俯瞰图分辨率为290´300。
在进行图像分割前, 对50幅逆透视后的路面图像在3.1中确定的参数区间进行样本训练, 后针对逆透视图使用参数自学习方法获取阈值分割的最优参数, 对整个检测过程进行分步实验, 并对分割效果进行比对, 图7是分步实验结果图, 图8是分割效果比对图, 图7与图8的分割优化参数见表1。图7中: (a)是一张道路逆透视图; Canny边缘检测结果如(b)所示; (c)为第1次分割结果, 很明显其中有较多杂质; 使用边缘信息滤除非法目标获得最终的二值图, 并完成人行横道的检测, 如(d)所示。
考虑路面存在光照不均匀的情况, 因此选取同时具有阴影和光照过强情况的图片, 分别用本文算法和全局OTSU方法进行分割比对测试, 实验分割效果比对如图8所示, 全局OTSU方法除了分割出部分地面标线外, 还会将光照过强的区域也分割出来, 易导致人行横道的误检, 而本方法在对比度不明显的区域依旧有很好的分割效果, 确保了人行横道检测的准确率。
由表1可知:为边缘像素权值,1和1为顶部1/3逆透视图像选取的邻域大小及常值,2和2是底部 2/3图像的邻域大小及常值,p为滤除杂质时的分块大小。此外, 直接给定的参数为: 高斯滤波器大小为 11,= 2,1= 0.1,2= 0.01。
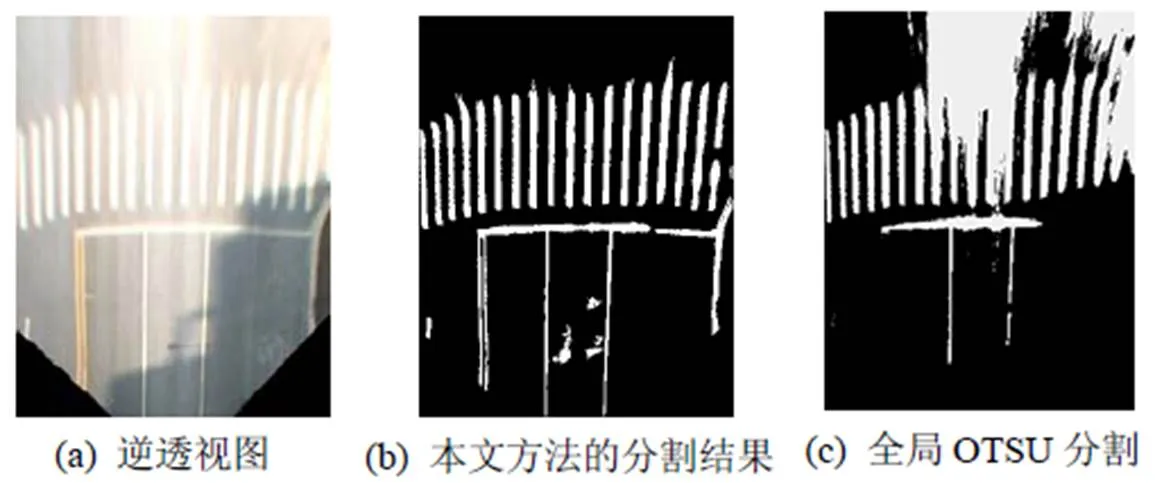
图8 分割效果比对图

表1 优化后的分割参数
选取了600幅城市道路图像进行了测试实验, 其中100幅不含人行横道, 且350幅的道路光照不均匀或存在阴影干扰。检测程序由VC++结合openCV库完成编写, 实验结果为: 平均检测时间为79 ms; 误检率为1.2%; 丢失率为1.7%。丢失原因为前方车辆遮挡住了大部分的人行横道, 误检原因是由于光线过强导致地面镜像光过大。实验表明该方法对于城市道路人行横道的检测有良好的实时性、有效性和适应性。
6 结束语
通过对分割算法的改进, 准确提取出地面标志并应用于检测, 引入Canny边缘信息, 将其与自适应阈值相结合, 在一次分割后再次利用边缘信息滤除碎片。在光照不均匀情况下, 依旧能很好的提取地标信息。为了得到较优的分割参数, 使用决策树和自学习方法对相关参数进行了优化选择, 并提高了Canny边缘检测算子的精确度。
此外, 该方法中逆透视变换的使用, 将人行横道的检测约束在一定范围内的路面俯瞰图上, 减少了路面其他物体对检测的干扰, 大大提高检测率。另一方面, 逆透视后人行横道的形状更直观, 使得长条白色标线选作候选目标成为可能, 此类候选目标较线段增加了长宽比属性, 从而降低了误检率。
[1] Stephen S, Michael B. Road feature detection and estimation [J]. Machine Vision and Applications, 2013, 14(3): 157–165.
[2] SoheilianB,PaparoditisN,BoldoD.3Droadmarkingreconstructionfromstreet-levelcalibratedstereopairs[J].ISPRSJournalofPhotogrammetryandRemoteSensing,2015,65(4):347–359.
[3] 刘艳赵英良. Otsu多阈值快速求解算法[J]. 计算机应用, 2011, 31(12): 3 363–3 365.
[4] Sebsadji Y, Tarel J, Foucher P, et al. Robust road marking extraction in urban environments using stereo images[C]// Proc of 2010 IEEE Intelligent Vehicle Symposium, San Diego:IEEE Press, 2010:21–24.
[5] DING Lijun,Goshtasby A. On the Canny edge detector [J]. Pattern Recognition, 2011, 34(3): 721–725.
[6] Derek B, Gerhard R. Adaptive thresholding using the integral image [J]. The Journal of Graphic Tools, 2007, 12(2): 13–21.
[7] 徐晶, 孙艳民, 付旭轮, 等. 基于决策树算法的无线参数优化方法[J]. 电信工程技术与标准化, 2012, 24(1): 7–10.
[8] 李卫高, 赵望达. 神经网络与模糊逻辑在火灾探测报警系统中的应用. 湖南文理学院(自然科学版), 2018, 30(2): 42–46.
[9] 夏勇. 图像分割技术研究[D]. 西安: 西北工业大学, 2014.
[10] 张景发.不确定随机神经网络的几乎必然指数稳定[J]. 湖南文理学院(自然科学版), 2017, 29(3): 13–19.
Based on decision tree parameter optimization algorithm of crosswalks detection
Zhang Yingzheng1, Cui Guohua2
(1. Department of Information and Engineering, Hunan Engineering Polytechnic, Changsha 410151, China; 2. College of Computer Science and Technology, Huazhong University of Science and Technology, Wuhan 430074, China)
In order to make the vehicle quickly and accurately detect the pedestrian crossing, in view of the on-board camera for pavement images, a pedestrian detection method is put forward based on decision tree parameters optimization, This method works in three steps. First, the search for crosswalks is reduced to a suitable bird's eye view of road surface by using inverse perspective mapping. Secondly, white lines are extracted through threshold segmentation. Lastly, crossing is detected according to its feature attribute. The second step is very essential for the following process. Hence, an improved algorithm is adopted based on local adaptive threshold and edge information, while optimization of segmentation parameters is achieved through decision tree. The experimental results show that the improved segmentation effect is good and the detection rate of crosswalk is improved effectively even when the illumination of the road surface is uneven.
crosswalk detection; decision tree; inverse perspective mapping; adaptive threshold
TP 391.41
A
1672–6146(2020)03–0019–06
10.3969/j.issn.1672–6146.2020.03.004
张应征, 406851863@qq.com。
2019–09–25
(责任编校: 张红)
