三维激光扫描技术在高速公路沉降监测中的应用
2020-07-15朱玉明牛英杰董加江
成 枢,朱玉明,牛英杰,董加江
(1.山东科技大学测绘科学与工程学院,山东 青岛 266590;2.山东天昀和测绘工程有限公司,山东 淄博 255000;3.山东新陶阳矿业有限责任公司,山东 肥城 271624)
交通工程的正常运营是现代社会稳定运行的基础, 由于外界因素以及结构本身缺陷等作用, 交通工程结构使用性能衰退, 安全与耐久性降低, 甚至会出现安全事故。通过科学有效的方法对交通工程进行合理的检测与评定, 是对交通工程进行预防性养护管理, 维修加固的重要手段[1]。
三维激光扫描技术是一项新兴的获取物体空间数据的方式, 具有精度高、速度快、非接触测量及穿透能力强等特点, 从而能够获取物体表面的信息特征[2-4]。在国内外被广泛应用于数字城市建设、滑坡监测、变形监测、地形测绘、建筑测绘、文物保护、三维模型重构、土石方算量等领域[5-6]。本文通过简略介绍三维激光扫描技术的原理, 并结合具体的测量案例阐述三维激光扫描技术在高速公路沉降监测中的应用。
1 三维激光扫描技术原理
三维激光扫描获取的点都带有三维坐标,与全站仪测量原理基本类似,是由测角、激光测距和辅助系统组成的。获取点云的坐标系是扫描仪自身的仪器坐标系。扫描仪的中心位置定义为坐标原点O,Z轴垂直于仪器的横向扫描面竖直向上,X、Y轴在坐标系的水平面上,Y轴常是扫描仪的激光发射方向,X轴垂直于YOZ平面向右,构成了右手直角坐标系[7-9]。三维坐标测量原理图如图1所示。

图1 三维坐标测量原理图
图中,斜距S是被测物体表面任意点P到扫描仪中心的距离,水平角α是横向扫描角度值,竖直角β是纵向扫描角度值。
任意被测点P的坐标公式如式(1)所示[10]。

(1)
2 数据采集与预处理
2.1 研究区概况
S市城市轨道交通4号线三期主体工程4301标段清湖北站-竹村站区间盾构段隧道设计为两分离盾构法隧道单洞。盾构机上方为JH高速路面,为了预防JH高速公路路面出现明显下沉和突变,影响JH高速公路的正常通行,甚至出现安全事故,要求掘进过程中必须要严格监测高速公路沉降变化量,整个沉降周期的变化值不能超过3 cm。
由于JH高速公路的特殊性:客流量大,监测工作不能影响高速公路的正常运行,更不能封路,为了保证JH高速公路监测项目的正常安全进行,决定采用Trimble SX10全站扫描仪对高速公路进行全面科学的监测。
2.2 外业数据采集
本文通过对两个时期点云数据的采集、处理以及变形分析,同时将其与二等水准监测结果作对比,分析三维激光扫描技术应用于矿区高速公路沉降监测的可行性。
根据现场情况,设置了2个测站点以及8个监测点。在测站点架设SX10全站扫描仪并后视建站,平面坐标系及高程坐标系均为独立坐标系,假定K1点坐标为(2 000,1 000,20),K1K2方位角为90°,使用全站仪功能,测出8个监测点位的坐标,方便后期在点云数据中选取相同位置与水准测量做变形分析的比较。之后对目标区域进项扫描获取点云数据,在车辆过多时或者距离过远时可以多扫几遍,以防止点云稀疏对点云后处理造成影响。
同时使用天宝DiNi电子水准仪对监测点进行二等水准监测。

图2 点位分布图
2.3 点云数据预处理
实验使用的是天宝SX10全站扫描仪采集点云数据,外业采集数据时需要建站,因此采集到的点云数据都带有绝对坐标信息,不需要转换坐标系,也不需要进行配准,所以数据预处理比较简单。本次数据处理主要是点云数据的去噪和精简。
噪声对点云的建模和对比分析影响很大,因此必须对点云数据进行去噪。使用TRW软件中的“分割”功能,对点云进行手动去噪。
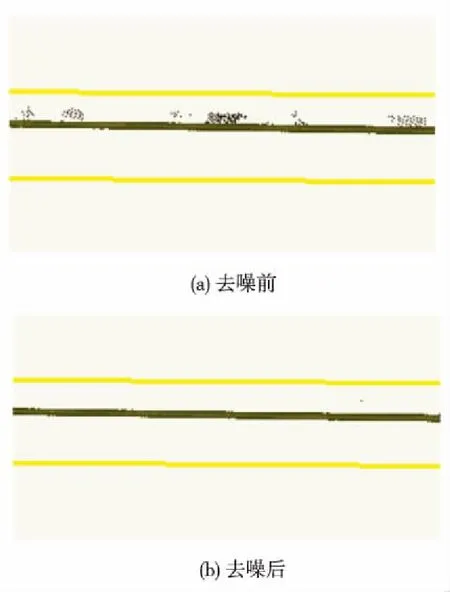
图3 对点云数据进行去噪
扫描仪扫描时,一定范围内的点云数据点云密度较大,距离越远,扫描到的点云越稀疏。因此获取的点云数据有一部分点云密度很稀,无法使用。需要进行点云精简,否则会影响变形分析。
3 点云数据后处理
高速公路的沉降量可以通过比较点云到参考模型的距离获得,在此将该方法简称C2M。因本文是对公路路面进行建模,公路路面没有明显的特征点、线,只能使用曲面重构法进行建模,同时由于自身条件因素,选用Geomagic control软件对公路进行建模与分析。具体的实验流程及结果如下。
表1局部位置沉陷量表


图4 对点云数据进行精简
首先导入数据,将预处理后的两期点云数据分别导入到Geomagic control中,在这里选择第一期测量数据作为基准点云数据,最后一期测量数据作为比较数据。
选定基准点云数据,将其生成模型并将生成的模型设置为参考模型。

图5 基准点云生成的模型
将最后一期数据与参考模型进行对比得到的变形值通过色谱图显示出来,并通过“比较点”查看需要的局部位置的变形值。
由3D分析色谱图和局部位置沉陷量表可知,高速公路路面大部分区域都发生了沉降,但是沉降都不大,沉降量集中在0~2 mm之间。沉降区域变化最大的主要是在隧道下穿区域上方,沉降量基本都在4~6 mm左右,有小部分区域沉降量较大,达到了9.024 mm,但是没有超过10 mm,在要求的30 mm的规定范围之内,可以继续安全施工。

图6 3D分析色谱图
4 精度分析
本研究中外业采集数据时需要建站,因此采集到的点云数据都带有绝对坐标信息,不需要转换坐标系,也不需要进行配准,因此没有配准及拼接误差。扫描精度为1.5 mm,利用Geomagic control软件对高速公路进行建模与分析,因此首先需要对模型的精度进行分析,分析实验是导入同一期点云数据两次,将第一次的点云建模,与第二次导入的点云做3D分析,平均偏差为-0.008 1 mm,均方根值为1.513 5 mm,模型精度较高。将三维激光扫描获取的沉降值与二等水准沉降值对比如表2所示,两者较差最大为2.39 mm,沉降值对比图如图3所示,可以看到两者变化趋势基本一致,且偏差较小。

表2 沉降值对比表
5 结 语
本文采用SX10全站扫描仪采集监测区内高速公路的两期点云数据,使用天宝TRW软件对点云进行预处理,选用Geomagic control软件进行点云数据后处理获取了监测区沉降情况,得出如下结论:

图7 沉降值对比图
(1)隧道施工对公路产生了影响,使其公路路面大部分区域都发生了沉降,小部分区域沉降量较大,达到了9.024 mm,但是没有超过10 mm,在要求的30 mm的规定范围之内,可以继续安全施工。
(2)通过对三维激光扫描技术与水准测量的对比得出,使用三维激光扫描技术进行公路沉降监测,突破了传统单点测量方式的局限性,具有非接触、高精度、高效率的测量优势。将三维激光扫描技术应用于公路沉降监测具有一定的可行性及应用价值。
