极寒环境的输电线路机器人巡检关键技术研究
2020-07-15高春辉李方秘立鹏王泽禹
高春辉,李方,秘立鹏,王泽禹
极寒环境的输电线路机器人巡检关键技术研究
高春辉1,李方2,秘立鹏1,王泽禹3
1. 国网内蒙古东部电力有限公司电力科学研究院, 内蒙古 呼和浩特 010020 2. 广东科凯达智能机器人有限公司, 广东 佛山 528300 3. 国网内蒙古东部电力有限公司检修分公司, 内蒙古 通辽 028000
国内高压输电线路机器人巡检存在运行环境复杂、传感器信息量大且多样和越障效率低等问题。本文以极寒条件下500 kV输电线路典型障碍物为研究对象,提出一种利用图像处理技术预处理提取目标特征,机器学习SVM分类决策算法分类,再与结构约束结合从而可以高效准确地识别高压输电线路障碍物,并通过准确性和有效性验证。结果表明,该算法可以准确地识别定位防震锤等障碍物,对我国高压输电线路智能机器人巡检技术的发展提供了参考和借鉴。
输电线路; 机器人巡检
架空高压输电线路是远距离输配电的主要方式,也是其重要的安全保证[1]。高压输电线路架设在野外,易发生腐蚀、磨损、断链等情况,有时还会在其上附着塑料袋、树枝等异物[2]。这对电力的输配影响非常严重,极大的危害了电力的输送。随着机器人技术的发展,国内外许多学者及研究机构都开始对高压巡检机器人进行研究。在文献[3]中,开发出一种巡线机器人来检测传输线绝缘子劣化和损坏等障碍,实现了传输设备绝缘子串的状态检测和实时评估[3]。在文献[4]中,开发了一种能够在500 kv传输线上行走并越过障碍物的巡检机器人,机器人可独立沿直线杆塔线路巡检[4]。
基于以上研究,本文以500 kv输电线路典型障碍物为研究对象,提出了一种低温条件下高压输电线路的典型障碍物检测识别方法。并通过实验验证了算法的正确性和有效性。
1 输电线路巡检机器人概述
通常高压输电路上机器人巡检视觉系统包括高清数字CCD或CMOS图像传感器、上位工控机、图像处理软件等。巡检机器人前端搭载高清的数字CCD或CMOS图像传感器,其视场与前进方向呈一定角度可以拍摄上方导线上障碍物,采集图像并经过灰度、滤波平滑等预处理,再对图像特征提取和分析,上位工控机发送决策指令,输电线路上机器人巡检示意图,如图1所示。
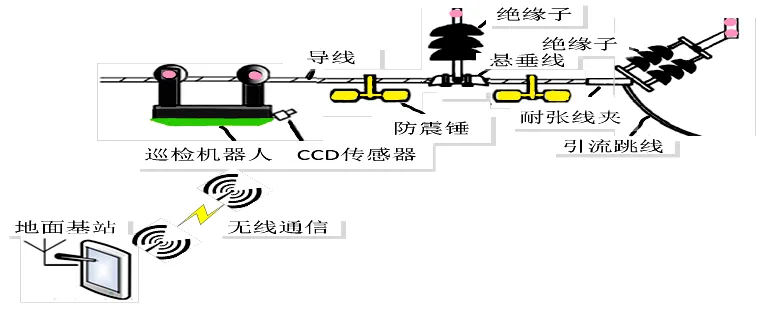
图 1 输电线路机器人巡检示意图
2 障碍物识别算法
500 kV四分裂输电线路常见障碍物有间隔棒、防震锤、悬挂线夹等[10]。但这些障碍物的表面结构和颜色特征并不十分清晰。但其原始特性与高压线呈一定的位置关系。识别算法主要分为障碍物特征提取与障碍物分类识别模块。
2.1 障碍物特征提取
通常输电线路上机器人巡检作业受光照、恶劣环境条件的影响,其采集的图像会有一定的噪声等干扰,给障碍目标图像的特征提取带来一定的影响。为降低噪声干扰的影响,需要对图像进行预处理,另外由于图像边缘提取方法的Canny算子在图像边缘检测方面具有较强抗干扰性,为在恶劣外界环境如极寒条件下得到清晰的边缘图,本文采用数学形态学方法与Canny算子结合,去除灰度图像中的毛刺,只留障碍目标的大体形状。以高压输电线路上的防震锤为例,对改进前后算法进行目标识别对比,如下图2所示。从图2中可以看出改进的Canny算子(c)图提取的目标受噪声对特征的影响更小。
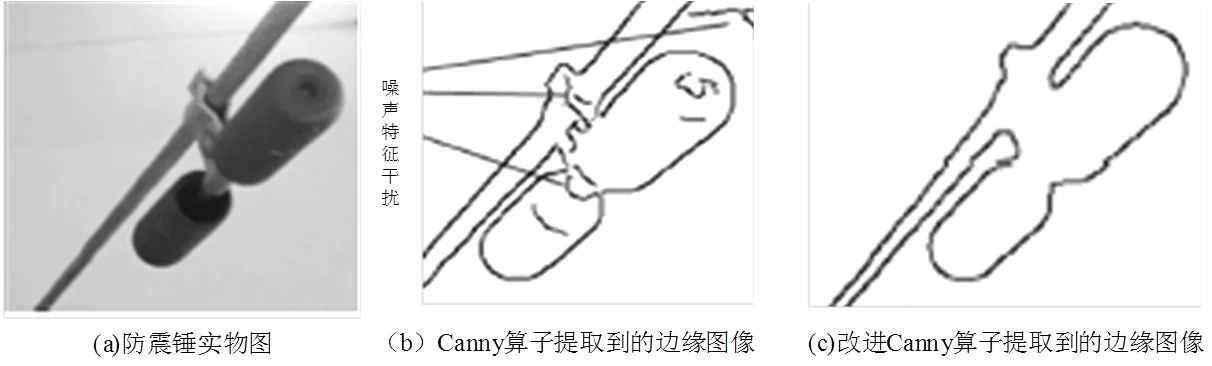
图 2 不同方法提取的边缘图像
2.2 识别算法
目前人工智能技术在输电线路检测及其故障诊断方面具有广泛的应用,如何对预处理的图像进行障碍物特征的快速、准确识别至关重要。本文通过提取大量样本图像Haar与HOG特征,再通过SVM分类识别方法建立模板特征数据库,将巡检机器人在运行过程中采集到的图像经过上述同样的方法处理并进行快速特征查询与匹配。
关于支持向量机SVM方法对大量采集的障碍目标样本图像进行训练,提取其特征训练多分类,为兼顾算法效率与准确率对算法具体优化措施如下:
(1)选取大量的不同环境下的障碍目标物多角度、不同距离拍摄的样本图像作为训练样本。基于常用的车辆与人脸识别的图像Harr特征,再对提取图像的HOG特征降维,只留区分性大的特征信息并保证训练识别的速度与效率。
(2)SVM算法核函数的优化选取
描述决策的SVM分类函数如式(1)所示:
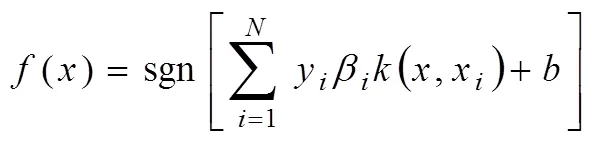
在式中,x和y分别是训练集的特征向量和类标签;(,x)是SVM的核函数;β是拉格朗日乘数的向量。支持向量机的性能可以通过惩罚参数“C”和核函数来评价。
(3)利用SVM算法将实现障碍目标的多分类问题,将其转化为多目标函数求解,文中采用决策树的方法,通过大量的正负样本进行训练。
以上方法在一般的气象环境下可以快速的识别出障碍目标,但在极寒条件下,时常输电线上的障碍目标可能有结冰雪遮挡以及存在高反光等严重影响障碍目标原有的特征信息。
可以通过结构约束来解决,结构约束利用分类器识别的区域分割,提取边缘轮廓去除干扰因素后,然后拟合轮廓离散点的中心线。悬垂线夹由轮廓中心线和高压线之间的横坐标距离通过约束条件来识别。通过对障碍物类型的检测和识别,可以得到障碍物的具体位置,帮助巡查机器人提前做出控制策略越障,以下给出该方法检测实物图例如图3所示。
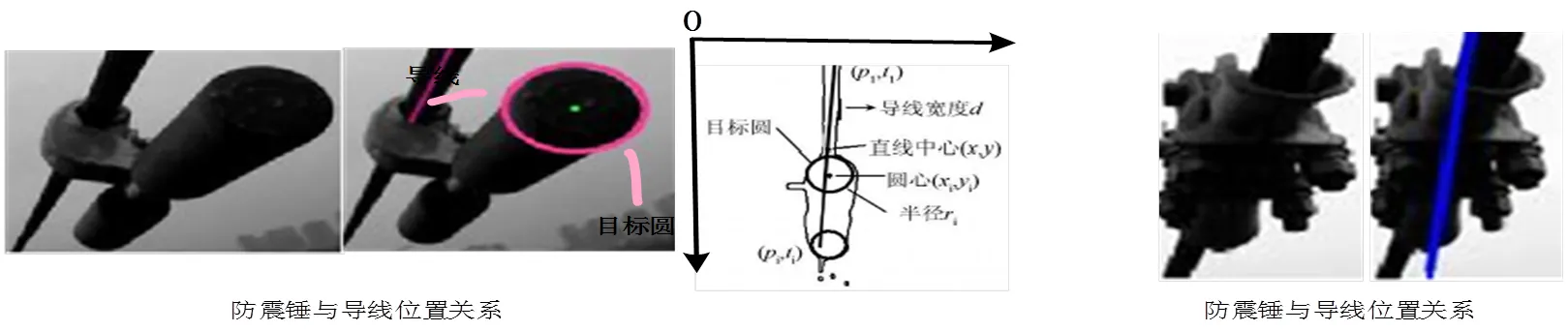
图 3 结构约束实物目标识别
通过简单的目标结构特点、位置识别定位与以上SVM特征分类方法结合,可以更快速、准确的识别极寒条件下的输电线上的障碍目标,以下给出整个算法的流程图如图4所示。
3 结果与分析
鉴于实验室环境与实际环境有很大的差异,对实验结果有很大的影响,实验验证在室外环境进行。下面以常见的防震锤、间隔器以及悬垂线夹三种障碍目标为例对算法进行验证,在机器人检测到目标后,启动障碍目标识别,对实时采集的图像预处理得到边缘图像,提取图像的特征并将其输入到SVM中训练分类,经过决策树方法识别障碍物。
目前文中机器人处于优化设计阶段,以下针对高压输电线路上防震锤、悬垂线线夹以及间隔器等几种不同障碍物,通过采用输电线机器人视频图像来验证算法是否准确高效识别定位不同障碍物并越障,如下图5所示。
从图5中看出,上面三幅图分别为经过寒冷条件下未经过优化的SVM分类算法处理有防震锤、悬垂线夹以及间隔器的特征图像,受到特定环境背景的影响,通过对特征图像的检测部分仍存在一定的检测误差,图中存在误检区域。但通过优化后SVM分类算法结合障碍目标与导线的位置及其结构约束能够快速准确的识别出障碍目标。下面三幅图根据实验检测的目标框,返回目标框中心点坐标和障碍物与摄像机之间的距离,达到智能识别越障的目标。发现本文所给的输电线路上特殊环境下检测目标的识别定位精确度高。
为了验证算法的正确性和计算实时性,选择了3000张视频图像,包括1000个防震锤,1000个间隔棒和1000个悬垂线线夹,利用上述方法对样本图像检测结果如表1所示。
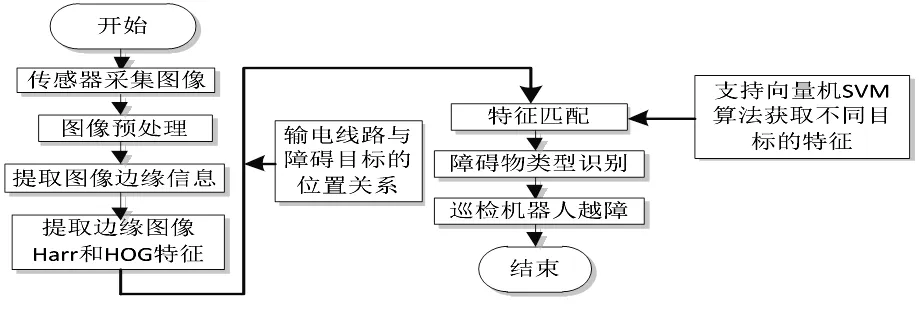
图 4 障碍物识别算法流程图

图 5 不同障碍物检测识别

表 1 障碍目标物检测实验数据
从表1中可以看出,SVM算法与结构约束方法可以检测几乎所有图像中的目标区域,但误检测较严重。通过优化后的SVM算法处理分类训练,结合结构约束进一步消除误检区域,可以更准确的对障碍目标识别定位。三个障碍物的检测识别率均在96%以上,达到了在极寒条件下的预期效果。
4 结论
高压输电线路巡检机器人使用高压线路地线作为工作路径完成基本巡检任务。本文以极寒环境下500 kv输电线路典型障碍物为研究对象,给出利用SVM分类决策算法结合不同障碍物与导线位置的结构性约束实现高压输电线路上不同障碍物的精准定位识别的方法,并通过实验验证了算法的正确性和有效性。实验结果初步表明:对防震锤、间隔器以及悬垂线夹三种障碍物的检测识别率均达到96%以上,取得了预期效果。鉴于目前的实验室设备和数据规模,本文仍处于早期阶段,在此基础上,逐步改进和完善将成为下一步工作的重点。
[1] 罗朝祥,万华舰,罗文博,等.输电线路导线覆冰图像处理与识别技术[J].中国电力,2014,47(9):132-136
[2] 彭向阳,钱金菊,麦晓明,等.大型无人直升机电力线路全自动巡检技术及应用[J].南方电网技术,2016,10(2):24-31
[3] 史帅彬,汪清,俞龙飞,等.基于配网功率预估的输配网全局潮流计算[J].电测与仪表,2018,55(18):44-49
[4] Azumaya CM, Days EL, Vinson PN,. Screening for AMPA receptor auxiliary subunit specific modulators [J]. PLoS ONE, 2017,12(3):1523-1538
Study on the Key Technology of Routing Inspection for Transmission Line by Robot under an Extremely Cold Environment
GAO Chun-hui1, LI Fang2, MI Li-peng1, WANG Ze-yu3
1.010020,2.528300,3.028000,
There are some problems such as complex operating environment, large and diverse sensor information and low obstacle surmounting efficiency.Based on the 500 kV transmission lines under the condition of cold typical obstacles as the research object, put forward a kind of pretreatment of the technology of image processing to extract target feature, machine learning classification SVM classification decision algorithm, then combined with structural constraints which can efficiently and accurately identify high voltage transmission line obstacles, and through the accuracy and validation.The results show that the algorithm can accurately identify and locate obstacles such as shockproof hammers, which provides a reference for the development of intelligent robot patrol technology of high-voltage transmission lines in China.
High voltage transmission line; robot inspection
TM755
A
1000-2324(2020)03-0525-04
10.3969/j.issn.1000-2324.2020.03.028
2019-01-05
2019-03-06
高春辉(1972-),男,硕士,高级工程师,主要研究方向为电气工程. E-mail:zhang2016128@163.com
