基于Matlab/Simulink的整车ABS控制算法仿真研究
2020-07-09李涛陈光耀张志猛
李涛 陈光耀 张志猛
摘要:汽车防抱死系统是保障汽车安全行驶的重要部件,如何做好该部件的设计工作一直以来都是相关单位十分重要的研究课题之一。因此,本次研究基于Matlab与Simulink对整车防抱死系统进行了仿真分析,并提出相关的控制算法,旨在优化防抱死系统的动力学性能,为该部件的优化设计提供理论基础。
关键词:防抱死系统;Matlab;Simulink;控制算法;仿真分析
中图分类号:U461.91:TP391.9
文献标识码:A
文章编号:1001-5922(2020)06-0082-04
ABS系统的全称为antilock brake system,翻译成中文为“制动防抱死系统”,本次简称为防抱死系统。汽车在行驶过程中往往需要进行大量不同程度的刹车操作,而在汽车行驶速度过快或路面光滑的情况下,由刹车操作所造成的车闸抱死将会严重威胁国内人员和路人的生命健康安全[1]。在没有发生交通安全事故的情况下,防抱死系统的不合理设计也会影响到相关部件与轮胎的使用寿命[2]。因此需要通过针对防抱死系统的合理化设计来提高整车运行的安全性和稳定性。
1 汽车车辆模型建模
1.1 车辆整车模型
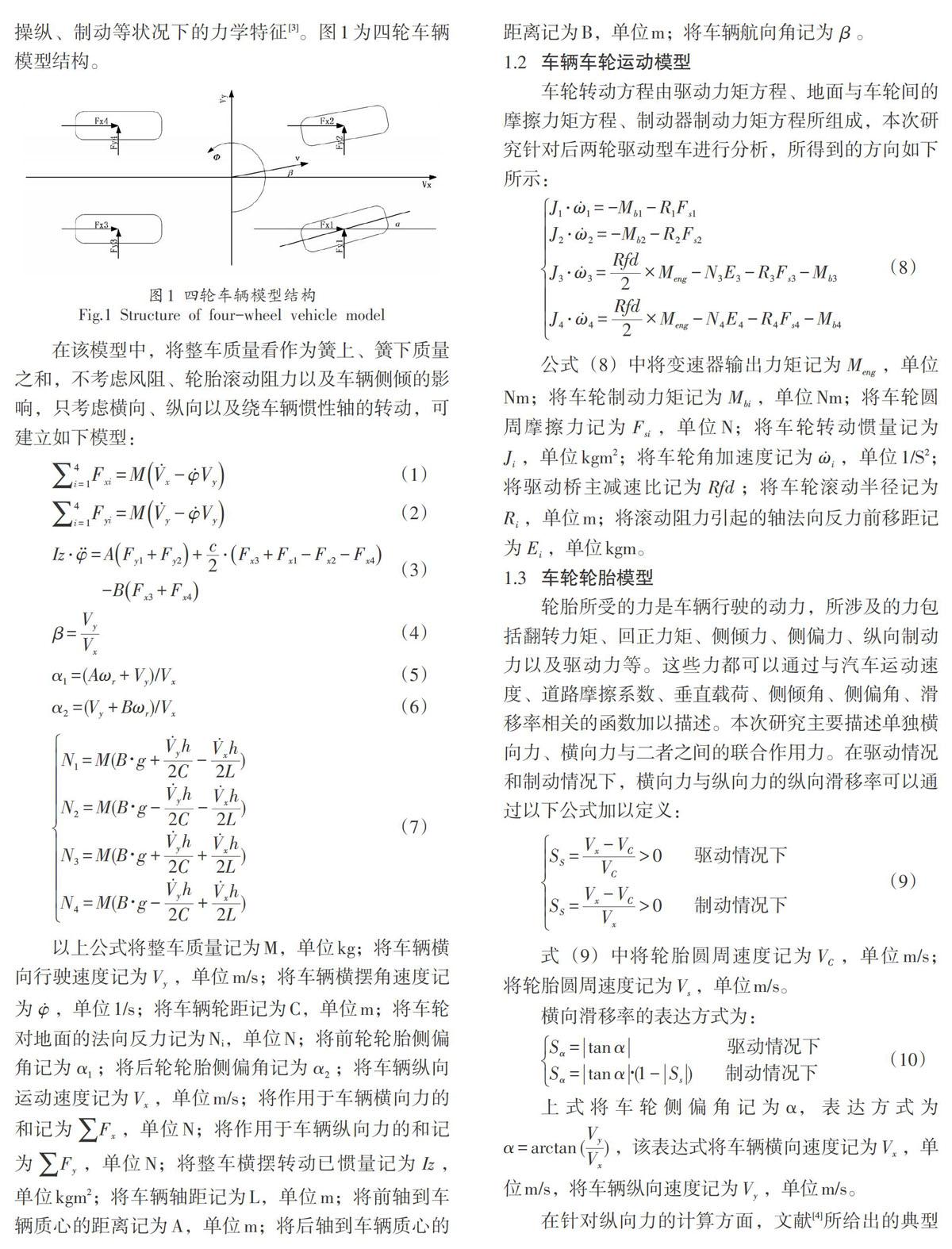
汽车模型属于典型的四轮车辆模型,该模型的设计涉及车辆运动的四车轮转动、车轮转角、横摆运动与纵向运动,建立车辆整车模型的目的在于模型车辆操纵、制动等状况下的力学特征[3]。图1为四轮车辆模型结构。
在该模型中,将整车质量看作为簧上、簧下质量之和,不考虑风阻、轮胎滚动阻力以及车辆侧倾的影响,只考虑横向、纵向以及绕车辆惯性轴的转动,可建立如下模型:
1.2 车辆车轮运动模型
车轮转动方程由驱动力矩方程、地面与车轮间的摩擦力矩方程、制动器制动力矩方程所组成,本次研究针对后两轮驱动型车进行分析,所得到的方向如下所示:
1.3 车轮轮胎模型
轮胎所受的力是车辆行驶的动力,所涉及的力包括翻转力矩、回正力矩、侧倾力、侧偏力、纵向制动力以及驱动力等。这些力都可以通过与汽车运动速度、道路摩擦系数、垂直载荷、侧倾角、侧偏角、滑移率相关的函数加以描述。本次研究主要描述单独横向力、横向力与二者之间的联合作用力。在驱动情况和制动情况下,横向力与纵向力的纵向滑移率可以通过以下公式加以定义:
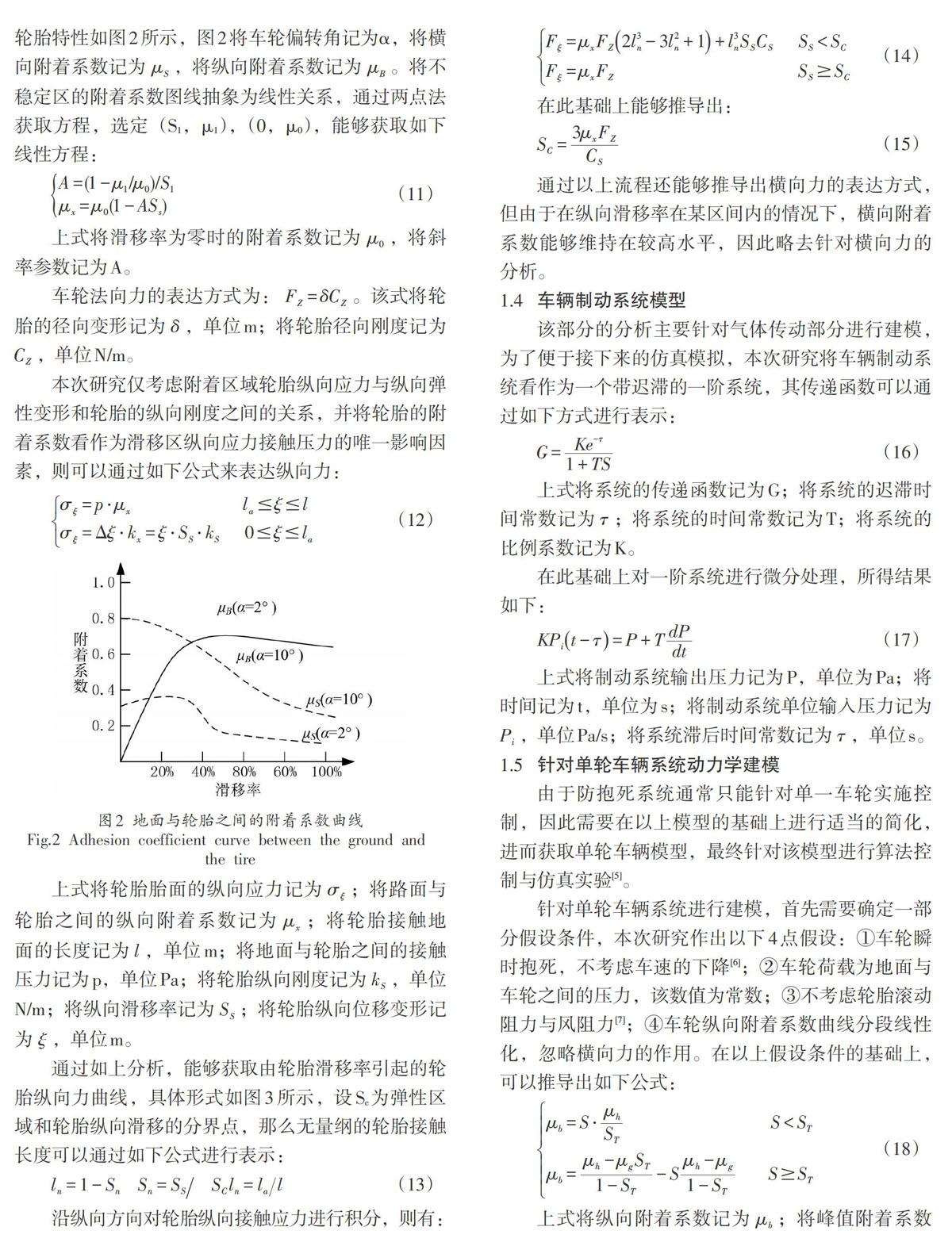
本次研究仅考虑附着区域轮胎纵向应力与纵向弹性变形和轮胎的纵向刚度之间的关系,并将轮胎的附着系数看作为滑移区纵向应力接触压力的唯一影响因素,则可以通过如下公式来表达纵向力:
通过如上分析,能够获取由轮胎滑移率引起的轮胎纵向力曲线,具体形式如图3所示,设Sc为弹性区域和轮胎纵向滑移的分界点,那么无量纲的轮胎接触长度可以通过如下公式进行表示:
通过以上流程还能够推导出横向力的表达方式,但由于在纵向滑移率在某区间内的情况下,横向附着系数能够维持在较高水平,因此略去针对横向力的分析。
1.4 车辆制动系统模型
该部分的分析主要针对气体传动部分进行建模,为了便于接下来的仿真模拟,本次研究将车辆制动系统看作为一个带迟滞的一阶系统,其传递函数可以通过如下方式进行表示:
1.5 针对单轮车辆系统动力学建模
由于防抱死系统通常只能针对单一车轮实施控制,因此需要在以上模型的基础上进行适当的简化,进而获取单轮车辆模型,最终针对该模型进行算法控制与仿真实验[5]。
针对单轮车辆系统进行建模,首先需要确定一部分假设条件,本次研究作出以下4点假设:①车轮瞬时抱死,不考虑车速的下降[6];②车轮荷载为地面与车轮之间的压力,该数值为常数;③不考虑轮胎滚动阻力与风阻力[7];④车轮纵向附着系数曲线分段线性化,忽略横向力的作用。在以上假设条件的基础上,可以推导出如下公式:记为μh;将滑移率为100%时的附着系数记为μg;将滑移率记为S;将最佳滑移率记为ST。
在以上假设的基础上还可以建立车辆动力学方程[8]。
制动力矩:Tb= at
(19)
车轮纵向附着力:F= N/i
(20)
车轮运动方程:Iω= FR - Tb
(21)
车辆运动方程:MV= -F
(22)
以上4式将制动力矩记为Tb;将制动时间记为t;将制动器制动因数记为a;将车轮对地面的法向反力记为N;将地面与车轮之间的附着系数记为μ;将车轮角速度记为ω;将车轮滚动半径记为R;将车轮转动惯量记为I;将车轮随着力记为F;将车辆速度记为V;将车辆质量记为M。
根据针对单轮车辆系统动力学模型可知,与车轮抱死相关的量有车轮角加速度、车轮角速度以及滑移率,接下来需要分析车轮速度稳定性与以上几个变量之间的关系[9]。
在S
由于该系统存在正特征根,可以看作為非稳定系统,随着时间的增加,其解速度会速度下降为零。根据以上分析可知,稳定区和非稳定区可以通过纵向附着曲线进行划分,可采用控制滑移率的方法来对车辆附着系数进行控制同。
2 典型的逻辑门限值控制方法
在制动初始状况下,设角减速度为a1,在a1大幅当前车轮角减速度的情况下,则将该时刻车轮速度作为车体的初始参考速度Vref0。利用车体减速度对车轮参考速度进行计算,具体计算方法为Vref=Vref0- at,通过该公式通过对任意时刻的参数滑移率进行计算[10]。
车辆在制动的初始阶段后,处于稳定区域内的车辆很有可能会进入减压阶段,这就需要对滑移率进行对比,若SS1,使车轮维持在μ -S峰值附近的不稳定区域,在此基础上开启减压,即进入第3阶段。
车轮在减压作用下,其角速度将会立即得到回升,在门限a1低于车轮当前角速度的情况下进入第4阶段的控制,即开启电磁阀。由于制动分泵以及制动系统惯性所给予的压力,车轮将会继续提升速度,处于负值增加的车轮速度将会提升至正值,直至超过角加速度门限值a1。
3 仿真实验
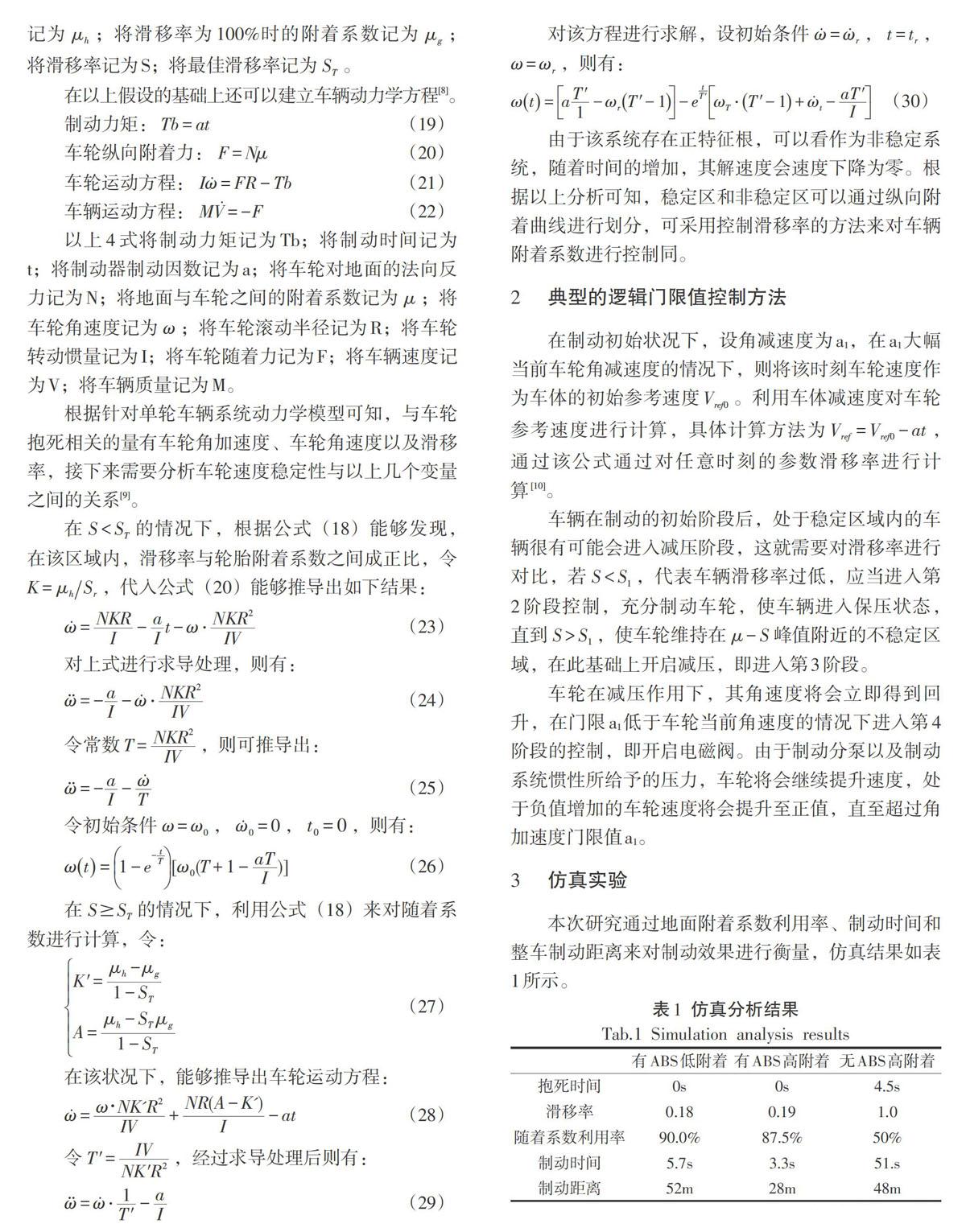
本次研究通过地面附着系数利用率、制动时间和整车制动距离来对制动效果进行衡量,仿真结果如表1所示。
经实验研究发现,在加装ABS系统后,明顯提升了车辆的制动效率,制动时间和制动距离明显缩短,制动安全性能得到显著提升。
4 结语
防抱死系统是汽车整体结构中十分重要的部件,在未来的研究中还需要针对该构件的自动化控制进行更加深入的研究,充分结合现代化通信技术与软件工程技术,综合运用自动化、智能化、信息化技术提升整车的制动性能及运行的安全性。
参考文献
[1]成俊,丁健,周涛,汽车防抱死制动系统CAN报文通信信号对称性分析[J/OL].汽车电器,2019( 11) [2019-12-12].https://doi.org/10.1327 3/j .cnki.qcdq.20191126.001.
[2]吴明翔,复杂路况下高速行驶汽车防抱死制动系统滑移率最优跟踪控制[J].上海师范大学学报(自然科学版),2019,48(04):375-382.
[3]王爱国,秦炜华,张钱斌,等,基于硬件在环实验的汽车电动助力转向与防抱死系统控制研究[J].齐齐哈尔大学学报(自然科学版),2019,35(04):36-39.
[4]吴成震.集装箱半挂车的防抱死制动系统的改装研究[J].科技风,2019( 02):157.
[5]郑国峰,上官文斌,段小成,等.汽车悬架球铰四轴载荷谱磨损试验方法[J].振动,测试与诊断,2018, 38(02):266-272+416-417.
[6]陈泳,汽车球铰防尘罩的有限元分析[J].汽车零部件,2015 (04):47-49+81.
[7] Song, Jeonghoon, Che, Woo Seong. Comparison andevaluation of brake yaw motion controllers with an anti-lock brake system[J].Proceedings of the Institution of Me-chanical Engineers, 2008, 222( D7).
[8] Andrew Petersen, Rod Barrett, Steven Morrison. Driv-er- training and emergency brake performance in carswith antilock braking systems[J].Safety Science, 2006, 44(10).
[9] Research on combination of combined brake systemand antilock brake system for motorcycles[J].JSAE Re-view, 1996, 17(4).
[10] 9731596 Development of motor actuated antilockbrake system for light weight motorcycle[J].JSAE Re-view, 1998, 19(1).
作者简介:李涛(1992-),男,河南周口人,硕士研究生,助教,研究方向:现代汽车设计制造。
