隧道运维管理机器人系统设计及应用
2020-07-08薛春明
薛春明
(山西省交通科技研发有限公司,山西 太原 030032)
0 引言
随着高速公路隧道大量投入运营,汽车数量的增多,各类交通事件也明显增多,日益成为高速公路交通的重要问题。由于隧道是一座狭长的建筑物,交通事件的偶然性和突发性极易导致交通事故的发生,因此,及时发现交通事件,主动报警杜绝交通事故,提高道路安全系统,保障高速公路畅通已成为迫在眉睫的问题[1]。
在日常运行管理中,隧道通行状态主要通过人工巡查、车辆巡逻、视频轮巡等方式进行现场监控,由于存在时间间隔,无法做到实时、准确、全面地对隧道进行监控[2];特别是隧道发生火灾时,无法第一时间准确获取现场情况,在隧道内温度、毒气浓度等多种因素不明确情况下,救援人员很难下决心突入救险;另外,隧道照明灯具定期清洁通常需要封闭交通,借助高空作业车完成,工作效率低、花费高、危险性大。
隧道运维管理机器人能够对隧道进行全天候、全方位监测,实时评估隧道运行状况,及时发现隧道安全隐患,保障公路隧道安全运营,提高隧道运维智能化水平[3]。
1 机器人系统总体设计
1.1 系统组成
隧道运维管理机器人由固定导向系统、电气通信系统和机器人系统构成。总体设计方案如图1所示。固定导向系统为机器人移动提供导向作用,安装于隧道衬砌表面且沿行车方向,包括行走导轨、导轨固定块、安装支架等。电气通信系统的作用是为机器人系统提供电力和控制信号,包括充电桩、通信模块、光纤、电缆等。机器人系统实现巡检、异常监测和灯具清洁,包括驱动轮、导向轮、电池、固定平台、车辆识别器、机械臂、末端执行装置等[4]。
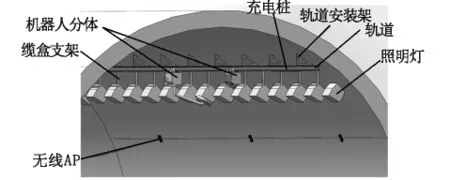
图1 隧道运维管理机器人设计方案
1.2 系统功能
隧道运维特种机器人系统主要实现日常巡检、异常监测、应急处置和灯具清洁等功能。
1.2.1 日常巡检
机器人在远程遥控状态下移动,通过搭载的高清云台摄像机对隧道路面状况、车辆行驶状况、设备状态进行观察和拍照,发现异常状况及时通知管理人员。
1.2.2 异常监测
机器人搭载高清摄像机及高精度传感器,通过移动监测能够及时发现道路安全隐患,如车辆拥堵、交通事故、路面异物、道路维修等,并可以及时准确做出判断,进行提示预警。
1.2.3 应急处置
隧道发生突发事件(交通事故、火灾、危化品泄漏事故等),操作人员可控制机器人及时赶到事故现场,实时将现场情况采集并传输至监控中心。
1.2.4 照明灯具清洁
按照人为设定的清洁周期,机器人在轨道上慢速移动,照明灯清洁毛刷高速转动,经过照明灯时自动完成对灯具的清洁;清洁过程为自动方式,不需要人工参与。
2 移动导轨和整机结构设计
2.1 轨道设计
轨道采用“工”形铝合金轨道,在隧道两侧线缆盒架上方每隔2 m架设一个轨道安装架和轨道吊扣,每根轨道通过4个轨道吊扣进行固定,轨道与吊扣之间采用穿插式连接,以解决由于热胀冷缩现象引起的轨道长度变化问题。轨道安装位置如图2所示。
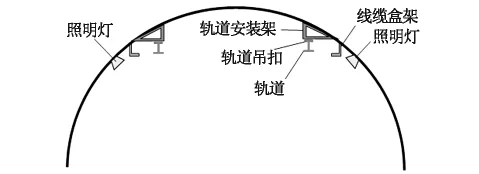
图2 轨道安装位置
轨道吊扣与隧道内壁通过轨道安装架进行安装,单个轨道安装架与隧道内壁通过膨胀螺栓连接,与吊扣通过螺丝连接。轨道安装方案如图3所示。
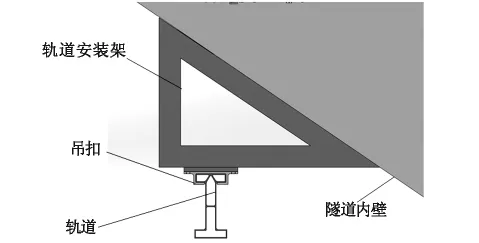
图3 轨道安装方案
2.2 机器人系统结构设计
机器人本体结构设计采用模块化设计理念,整体分为两个移动平台和一个功能平台。为了保证系统的安全性和稳定性,控制机器人单体重量,机器人采用分体式设计,包括巡检与应急处置机器人和灯具清洁机器人,设计方案如图4所示。其中,巡检与应急处置机器人除移动平台之外,配备了一个两自由度云台、传感器系统、语音通话系统、辅助照明系统,用来实现机器人的巡检和应急救援功能。灯具清洁机器人配备了机械臂和清洁毛刷,用来实现照明灯具清洁功能[5]。
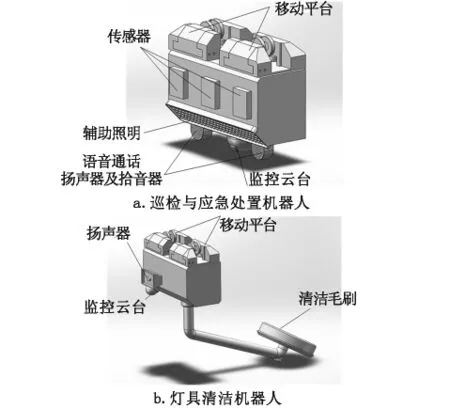
图4 机器人系统结构分体设计方案
2.3 移动平台设计
每个机器人分体均有两个移动平台,每个移动平台有两个驱动轮,两个导向轮,机器人移动平台方案如图5所示。驱动轮为超级人造胶材质,具有较强的抗冲击性能,能保证机器人在轨道上行驶平稳;导向轮的特殊结构不仅能在机器人行驶过程中起到导向作用,还能在遇到冲击的时候保证机器人始终不脱轨,既保证了机器人运行安全,也避免了对轨道的冲击。
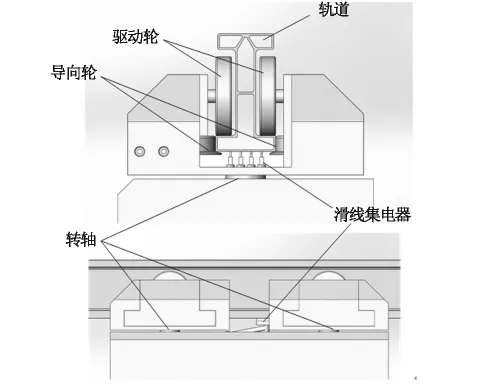
图5 机器人移动平台方案
3 电气系统和通信系统设计
3.1 机器人电气系统
为了保证系统可靠性和可维护性,隧道巡护机器人电气系统采用插卡式设计方式,所有电气系统都可以通过插拔方式更换。电气系统包括供电系统和控制系统组成,电气系统结构示意图如图6所示[6]。
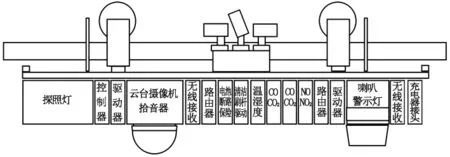
图6 电气系统结构示意图
3.2 机器人通信系统
考虑到隧道距离长、不通视,且机器人高速移动,系统设计构建具有自组网功能的Mesh网。在隧道内采用AP覆盖方式搭建,每100 m放置一个AP热点,AP热点与远程指挥系统通过光缆连接,机器人携带无线路由与AP热点无线连接。另外隧道内的巡检人员和车辆也可以通过AP网络与监控中心进行通讯。通信系统设计方案如图7所示。
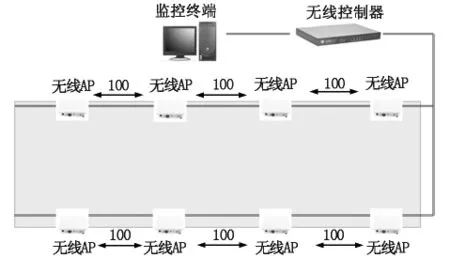
图7 通信系统设计方案(单位:m)
4 系统现场试验与工程应用
4.1 机器人移动轨道安装
4.1.1 划定高速标线
从隧道入洞口开始,到隧道出洞口位置,在设计高度,与路面平行,划定高度标线。在直线轨道安装每隔30 m的距离,以2 m为间距,划定垂直方向位置标线,高度标线与垂直标线交叉点即为直轨吊架安装孔中心位置。
4.1.2 直线轨道安装
在高度标线和垂直标线的交叉点,用直轨吊架安装孔定位模板,确认安装吊架的准确位置,安装直轨吊架。在直轨上,每隔2 m距离,穿一个吊扣架。穿好吊扣架的直轨,通过吊扣架的2个螺丝孔位,暂时固定到吊架上。暂时固定好所有直轨。直线吊架与吊扣架如图8所示。

图8 直线吊架与吊扣架
4.1.3 弯轨安装
紧急停车带、隧道出入洞口弯轨由弯轨专用吊架与吊架扣固定。弯轨吊架与吊扣架如图9所示。
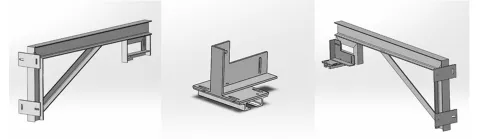
图9 弯轨吊架与吊扣架
4.1.4 调整轨道平直性
直线导轨和弯轨安装完成后,逐个松动吊架与吊扣架的固定螺丝,调整整个轨道平直。整个轨道平直,没有明显凸起、凹陷后,拧紧吊架与吊扣架的固定螺丝。在吊架与吊扣架平面连接处,把吊架与吊扣架点焊焊死。
4.2 电气系统安装
4.2.1 AP结点安装
在隧道两侧机器人轨道上方,每间隔100 m安装1个无线AP节点,在桥架正上方,固定AP接线端子箱。在靠近隧道中线,距离AP接线端子箱10 cm的位置,安装AP设备。AP电源线、光纤,从桥架进入端子箱。光纤盒、防雷器、AP电源放置在AP接线端子箱内。AP电源线、光纤,出端子箱,接AP节点设备。
4.2.2 AP供电电缆敷设
AP设备需要单独配置供电电缆。供电电缆采用4平方两芯阻燃电缆。AP供电电缆从入洞口配电室进入车行方向左侧地沟。由于该机器人有应急处置功能,AP设备需接入应急电源;需要为AP节点设置接地线。每个AP节点都需要有效接地。AP结点电源连接如图10所示。
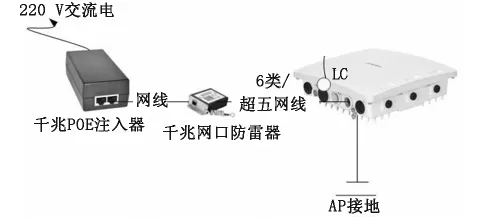
图10 AP结点电源连接图
4.2.3 通信光缆敷设
隧道管理站监控室内放置终端控制器、无线网络控制器、光线交换机等设备。终端控制器、无线网络控制器通过网线与光纤交换机连接。光纤交换机A、B各出3根12芯光纤,通过入洞口进入车行方向左侧地沟。AP节点通过光纤与控制终端进行通信。
4.2.4 机器人供电电缆敷设
机器人在2个隧洞口两侧,共设置4个取电口,用于机器人充电。入洞口侧2个取电口设置2根电源线,从入洞口配电室出来,进入地沟,通过配电箱,进入照明桥架,再分配到洞口两侧的机器人取电口上。出洞口侧2个取电口设置2根电源线,从出洞口配电室出来,进入地沟,通过配电箱,进入照明桥架,再分配到洞口两侧的机器人取电口上。
4.3 现场应用
在山西路桥集团长临高速公路有限公司黄花岭隧道开展实体工程应用,隧道运维管理机器人现场应用如图11所示,该隧道为路线穿越良马与安泽县间的越岭隧道,长度为2 140 m。黄花岭隧道进口和出口段为曲线,隧道内有两个紧急停车带,研发的隧道运维特种机器人应用于该隧道能够起到很好的示范作用。

图11 隧道运维管理机器人现场应用
5 结语
针对目前隧道监控通过人工巡检、视频轮巡方式,照明灯具清洁需封闭交通,人工高空作业存在的问题,设计研制了隧道运维管理机器人。对机器人系统进行了总体设计,并分别对机器人机械系统、电气系统和通信系统进行了设计。隧道运维管理机器人可实现日常巡检、异常检测、应急处置和灯具清洁等功能,对隧道进行全方位、全天候监测,实时评估隧道运行状况,及时发现隧道安全隐患,保障公路隧道安全运营,提高隧道运维智能化水平。
