基于移动激光扫描的靶标叶面积计算方法
2020-07-07李秋洁袁鹏成
李秋洁 袁鹏成 邓 贤 茹 煜
(南京林业大学机械电子工程学院,南京210037)
0 引言
变量对靶施药技术已在果园、苗圃病虫害防治中成功应用[1],其基础是对靶标的精准探测与信息提取[2-3]。激光雷达(Light detection and ranging,LiDAR)技术能快速获取树木完整形貌,提高测量效率,已广泛应用于树木信息提取[4-6]和三维重建[7]。将靶标冠层离散化为规则几何体,通过LiDAR 实时测量树冠外缘距离,结合预设的树行距离及其他系统参数,可估算出冠层体积,据此调节施药剂量,使药液在冠层内部均匀沉积[8-9]。上述方法适用于冠层结构紧密、叶片交错重叠程度大的靶标。对于疏枝果园,为增加果树产量、提高果实品质,果树冠层被修剪得较为稀疏,枝条的分支角度较大,叶片重叠程度低,此时难以准确计算冠层体积,更适合用冠层叶面积作为喷雾依据。
基于LiDAR 的叶面积测量主要研究叶面积指数(Leaf area index,LAI)、叶面积密度(Leaf area density,LAD)和总体叶面积(Total leaf area,TLA)等冠层参数。LAI 是单位土地面积的叶片总面积,通常从冠层点云数据中提取透光率、消光系数等参数来计算[10-11],而变量对靶施药需要测量喷雾方向上的叶片总面积,因此并不适合。LAD 为单位体积内的叶片总面积,先将体素化后的冠层划分为多个横切面或纵切面,然后计算激光束与冠层切面的接触频率,利用激光束方向与叶倾角进行校正,得到冠层切面的LAD[12-13]。LAD 计算较为复杂,并且需要乘以冠层体积才能得到叶面积,不满足变量对靶施药实时测量的需求。TLA 为冠层的总体叶面积,常采用点云数进行估计。文献[14]证明了冠层点云数与叶面积之间为线性关系;文献[15]采用高斯函数、多项式函数与指数函数拟合了0.2 m ×0.2 m ×0.8 m 长方体内的点云数与叶片数关系,拟合优度达0.936 4;文献[16 -17]随机选择一部分冠层点云数据,利用三角剖分算法生成的三角形面积估计点云个数与叶面积的比率,同时,考虑到测量距离对点云密度的影响,按距离对冠层分层,分别计算叶面积。
基于2D LiDAR 的移动激光扫描(Mobile laser scanning,MLS)技术已在靶标冠层体积测量中成功应用[9,18-20],在靶标叶面积测量上也取得了一些研究成果[14-15]。针对疏枝果园的变量对靶施药问题,研究基于MLS 技术的靶标叶面积计算方法,进而研究TLA 的计算方法。已有研究[15-17]表明,LiDAR探测距离和移动速度对点云密度有较大影响。本文分析上述因素与MLS 点云分辨率的关系,对点云数进行校正,以提高叶面积测量精度,为变量对靶施药提供基础数据。
1 材料与方法
1.1 移动激光扫描测量
试验采用日本Hokuyo 公司生产的UTM-30LX型2D 激光雷达(LiDAR),如图1 所示。最大测量距离30 m,扫描范围270°,扫描周期25 ms,角度分辨率0.25°,每次扫描返回以毫米为单位的1 081 个测量点,用4 个字节的整数表示。
MLS 测量系统如图2 所示,将LiDAR 盲区向下搭载在长度为1 m 的丝杆滑台上,由STC89C52 单片机控制FM576SFD04 型步进电机带动滑台在丝杆上以9.7 mm/s 的速度匀速移动,计算机通过串口读取LiDAR 数据,获取垂直于LiDAR 移动方向的扇形扫描区域内的靶标距离信息。

图2 MLS 测量系统Fig.2 MLS measurement system
1.2 靶标样本
采用树高1.4 m、冠幅0.8 m 的仿真树模拟疏枝靶标,仿真树共有6 根树枝,选择2、4、5、6 根树枝模拟由疏到密的不同疏枝情况,分别作为靶标1 ~4号,如图3 所示。

图3 疏枝靶标Fig.3 Sparse branch target
采用网格方法测量单片叶面积,如图4 所示,网格尺寸为0.2 cm。经测量,叶片高6.7 cm,宽4.0 cm,面积为19 cm2。由于仿真树的所有叶片面积相同,将叶片数乘以单片叶面积,可得到靶标总体叶面积,如表1 所示。

图4 单片叶面积测量Fig.4 Measurement of single leaf area

表1 靶标总体叶面积Tab.1 Total leaf area of target
1.3 格网面积计算
1.3.1 变尺度格网
MLS 点云数据为格网结构,可以通过测量点帧序号i 和帧内编号j 进行索引,记为(i,j),如图5 所示。

图5 MLS 数据的格网结构Fig.5 Grid structure of MLS data
由于MLS 分辨率受到LiDAR 测量距离和移动速度影响,格网的尺度并不一致,称为变尺度格网[21]。令ds和dm分别表示LiDAR 扫描方向和移动方向上的格网尺度,如图6 所示,则测量点(i,j)的格网尺度为

式中 r(i,j)——测量点(i,j)的测量距离
Δα——LiDAR 弧度分辨率
v(i)——LiDAR 在第i 帧的移动速度
Δt——LiDAR 扫描周期
由式(1)可知,随着LiDAR 移动速度和测量点距离增加,格网尺度增加,点云密度减小。
用测量点的格网面积表示与其接触的叶片面积,测量点(i,j)的格网面积为


图6 变尺度格网Fig.6 Variable-scale grid
1.3.2 格网尺度范围
为准确测量叶片面积,格网尺度应小于叶片尺度,取叶片长、宽中的较小值作为叶片尺度Δleaf,则MLS 测量系统的最大探测距离rmax和最大移动速度vmax为

1.4 叶面积计算
为提取冠层点云数据,求取MLS 点云三维坐标,其中,x 轴为LiDAR 移动方向,y 轴为深度方向,z轴垂直地面向上。测量点(i,j)的三维坐标为

式中 θ(j)——帧内第j 个测量点的扫描角度
根据冠层点云边界设置坐标阈值xmin、xmax、ymin、ymax、zmin、zmax,计算冠层点云的总体格网面积(Total grid area,TGA)

式中 R——坐标在[xmin,xmax]、[ymin,ymax]、[zmin,
zmax]范围内点云索引的集合
ATG——总体格网面积
采用线性模型拟合冠层总体叶面积与总体格网面积的回归关系,即

式中 k——斜率 b——截距
ATL——拟合冠层总体叶面积
变量对靶施药时,首先计算当前施药区域内冠层点云的格网面积ATG,然后采用式(7)求取叶面积ATL,据此调节施药剂量,使药液均匀分布在叶片上。
2 试验与分析
选取叶片长、宽中数值较小的叶片宽作为叶片尺度,即Δleaf=0.04 m。根据式(3)、(4),MLS 探测距离应小于9.167 m,移动速度应小于1.6 m/s。为分析LiDAR 探测距离和移动速度对叶面积测量的影响,丝杆到树干的距离D 设为1.0、1.5、2.0 m 3 个等级,同时,为模拟不同移动速度,对点云数据进行采样,即每隔若干帧选取一帧点云数据,设置不同的采样比使速度在0.194 ~1.455 m/s 之间变化,如表2 所示。

表2 采样比设置Tab.2 Sampling ratio setting
按照以上参数分别对4 个靶标进行数据采集,如图7 所示,通过改变探测距离和采样比,每个靶标均获取27 个样本,共获取108 个靶标样本。

图7 靶标MLS 数据采集Fig.7 Acquisition of target MLS data
2.1 冠层格网面积
2.1.1 不同参数对靶标点云的影响
求取原始点云数据的三维空间坐标,设置阈值分割出冠层点云,如图8 所示,此时D=1.0 m,为未采样的原始数据。
图9 为D =1.5 m 时采样比取20、80、140 时3 号靶标的冠层点云,随着LiDAR 移动速度变快,点云密度降低,点云数显著减小。
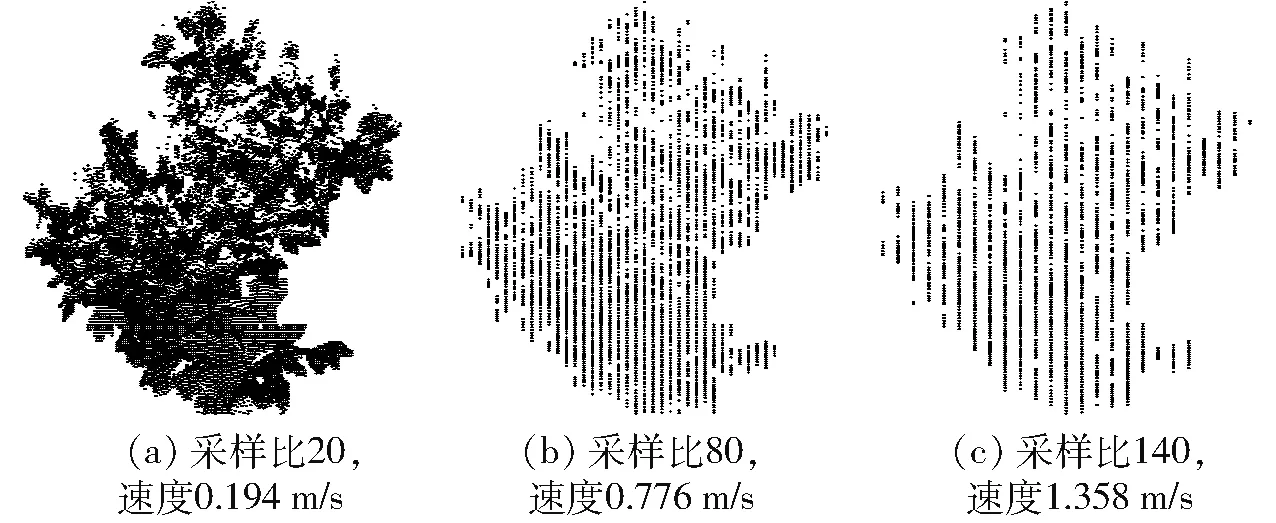
图9 不同速度下的冠层点云Fig.9 Canopy point cloud at different velocities
图10 给出D=1.5 m 时3 号靶标原始点云数据的距离直方图,从图中可看出,受2D LiDAR 扇形扫描测量方式和靶标冠层结构及叶片分布影响,冠层内的点云距离有较大差异,点云密度不一致。
表3 给出不同探测距离下3 号靶标原始点云数据的距离统计值及点云数,随着探测距离变大,点云密度降低,点云数显著减小。

表3 探测距离对靶标点云的影响Tab.3 Total leaf area of target
2.1.2 不同参数对靶标点云数和格网面积的影响
表4 为不同速度和探测距离下3 号靶标的格网面积,从表中可看出,格网面积受探测距离和移动速度影响较小。

表4 不同速度和探测距离下的靶标格网面积Tab.4 Target grid area under different speeds and distances m2
为对比不同参数对靶标点云数N 和格网面积ATG的影响,对数据进行预处理得到相对靶标点云数N 和相对格网面积,计算式为

式中 Nmin——靶标点云数最小值
ATGmin——格网面积最小值
图11 为不同靶标27 个样本的相对靶标点云数和相对靶标格网面积,为便于比较,设置相同的纵坐标范围。从图中可看出,靶标点云数受LiDAR 移动速度和探测距离影响较大,同一靶标的点云数有较大差异,而格网面积则差异较小。

图11 相对靶标点云数和格网面积Fig.11 Relative point number and grid area of target
采用变异系数(Coefficient of variation,CV)评价同一靶标点云数及格网面积的离散程度,计算式为

式中 σ——数据标准差
μ——数据均值
Cv——变异系数
表5 为靶标点云数及格网面积的变异系数,靶标格网面积具有较小的变异系数,不同参数下能稳定提取靶标格网面积。由于3、4 号靶标枝叶遮挡程度较高,因此不同参数(尤其是不同距离)对点云数的影响大于1、2 号靶标。由于离散格网会对枝叶稀疏的靶标引入更大的测量误差,因此与枝叶较密集的3、4 号靶标相比,1、2 号靶标有更大的格网面积变异系数。

表5 靶标变异系数Tab.5 Coefficient of variation of target
2.2 冠层叶面积
采用线性模型拟合TGA 和TLA,如图12 所示,拟合优度为0.909 0,均方根误差为0.129 7 m2,拟合方程为

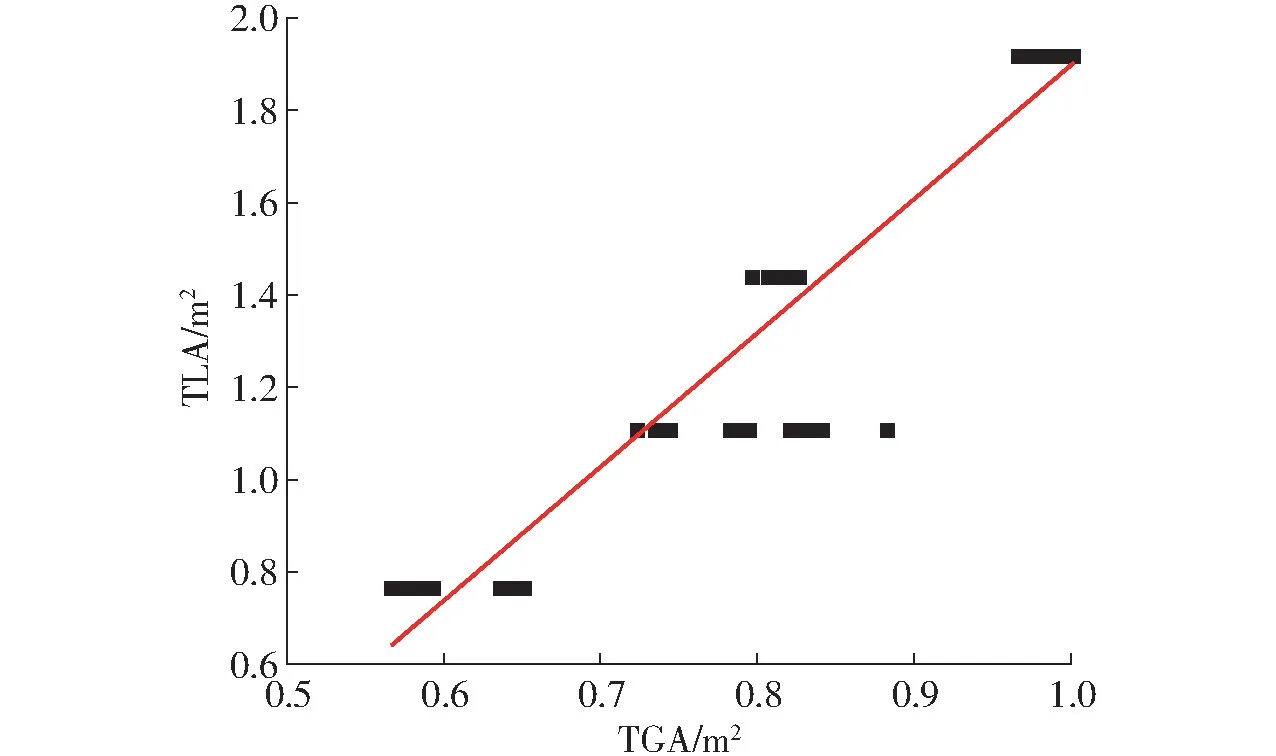
图12 靶标叶面积拟合曲线Fig.12 Fitting of target leaf area
为分析不同靶标的叶面积测量精度,计算每个靶标样本的相对误差

所有样本的相对误差均值为9.16%,标准差为7.71%,在D=2.0 m 时测量2 号靶标相对误差最大,为40.99%。表6 ~8 统计了不同靶标、不同探测距离和不同速度下叶面积测量的相对误差均值和标准差。从表6 可看出,3、4 号靶标的相对误差小于枝叶更为稀疏的1、2 号靶标,这是由于离散格网对枝叶稀疏的靶标引入更大的测量误差。从表7 可看出,探测距离对测量误差有较大影响,探测距离越远,格网在LiDAR 扫描方向上的尺度越大,使得测量精度越低。从表8 可看出,与靶标类型和探测距离相比,速度对测量误差影响较小,根据式(1)可知,速度对所有格网尺度的影响相同,而探测距离改变会引起测量点距离发生不同的变化,这种不一致性导致了探测距离对测量误差有较大影响。

表6 不同靶标的叶面积测量相对误差Tab.6 Relative error of leaf area measurement of different targets %
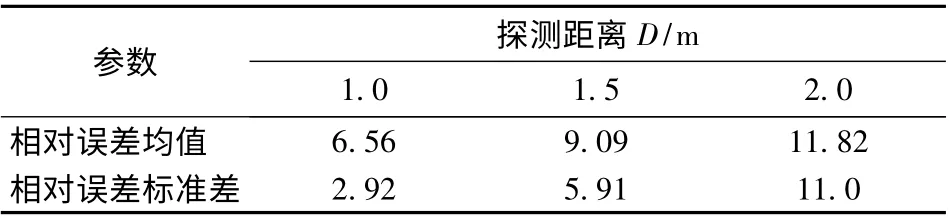
表7 不同探测距离的叶面积测量相对误差Tab.7 Relative error of leaf area measurement under different distances %

表8 不同速度的叶面积测量相对误差Tab.8 Relative error of leaf area measurement at different speeds %
3 结论
(1)针对疏枝果园的变量对靶施药问题,提出一种基于MLS 测量系统的靶标叶面积计算方法,通过分析系统分辨率建立变尺度格网,采用冠层总体格网面积估计总体叶面积。
(2)采用仿真树模拟4 种疏枝靶标,改变MLS的探测距离和移动速度,每个靶标采集27 个样本。试验结果表明,冠层格网面积受探测距离和移动速度影响较小,变异系数最大为0.053 7。
(3)建立靶标总体格网面积和真实总体叶面积的线性回归模型,拟合优度为0.909 0,叶面积测量相对误差均值为9.16%,说明本文方法能有效减小LiDAR 探测距离和移动速度对叶面积测量的影响。
(4)接下来可进一步研究枝叶分离方法,去除冠层中的枝干点云数据,利用激光入射角和多次回波校正格网面积,可提高叶面积测量精度。
