城轨牵引系统特性设计方法及线路仿真分析
2020-07-04卢俊孙立辉张超陈新溅高正梁
卢俊 孙立辉 张超 陈新溅 高正梁

摘 要:目前,城轨领域牵引系统项目在进行特性设计时,往往采用顺向求解法或经验法来确定列车特性,逐步形成了成熟的特性设计方法,但在某些海外项目牵引系统特性设计时,线路电流、粘着系数等参数直接决定列车特性发挥,目前的方法及经验无法很好地应用。本文提出逆向求解法,以线路电流限值推导牵引、电制动曲线拐点速度,以加减速度、粘着系数确定牵引力、制动力的大小,最终获得列车牵引特性,并运用线路仿真分析校核性能。
关键词:牵引系统;逆向求解法;线路仿真
中图分类号:U264文献标识码:A文章编号:1003-5168(2020)13-0097-05
Characteristic Design Method and Line Simulation
Analysis of Foreign Metro Traction System
LU Jun SUN Lihui ZHANG Chao CHEN Xinjian GAO Zhengliang
(Zhuzhou CRRC Times Electric Co., Ltd.,Zhuzhou Hunan 412001)
Abstract: At present, the traction system project in the urban rail field often uses the forward solution method or the empirical method to determine the train characteristics, and gradually forms mature characteristic design method and line simulation software. However, when designing the characteristics of the foreign traction system, the parameters such as line current and adhesion coefficient directly determine the characteristics of the train. The current methods and experience cannot be applied well. In this paper, the inverse solution method was proposed. The inflection point speed of the traction and electric braking curves was derived from the line current limit. The traction and the braking force were determined by the acceleration and deceleration and the adhesion coefficient. Finally, the traction characteristics of the train were obtained, and the line simulation was used to analyze the calibration performance.
Keywords: traction system;reverse solution method;line simulation
1 研究背景
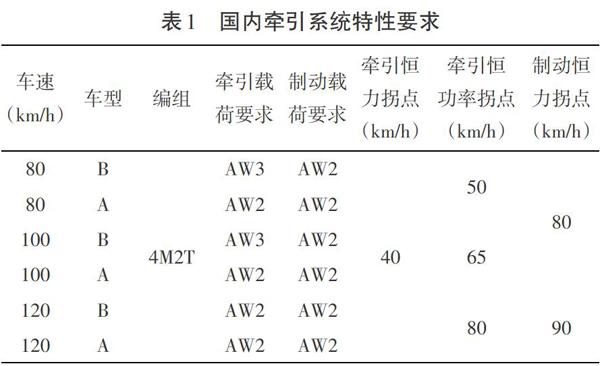
目前,國内的城轨牵引电传动系统项目在投标和项目设计阶段往往采用顺向求解法,即在已知车辆载荷和加/减速度要求后,计算所需牵引力与制动力,仅仅考虑性能冗余、列车阻力和粘着系数的影响。国内常用的80 km/h速度等级B型车,额定工况下的牵引特性曲线恒力拐点设定为40 km/h,恒功率拐点设定为55 km/h,制动特性恒力拐点设定为70~80 km/h,并形成以表1所示的特性要求[1-3]。
在某国外项目中,列车采用2辆动车1辆拖车(2M1T)共3辆车编组的B型车,若借鉴上述顺向求解法求得牵引力和制动力发挥范围,其线路电流将大大超过限制值,无法满足要求。
因此,本文提出逆向求解法来进行特性设计,先确定牵引特性曲线恒力拐点速度,进而确定恒功率拐点速度及制动特性恒力速度拐点,再以加、减速度要求和粘着系数限制确定牵引力、制动力的大小,形成初步的列车牵引特性曲线,由电机供应商拟合电机的特性,获得用于线路仿真的列车性能参数、电机参数。最后,运用线路仿真软件校核各项性能,同时验证文中特性设计方法的有效性。
2 车辆参数及性能要求
2.1 列车基本参数
列车采用第三轨供电方式,B型车配置,3辆编组配置,即由2辆动车(DM车)和1辆拖车(T车)组成,编组方式如图1所示。
供电电压:DC 475 V~DC 1 100 V;用于性能计算的平均线路电压:动力牵引DC 675 V;制动DC 750 V;牵引/电制动粘着系数≤0.17;动力牵引和制动时的线路电流限值为2.6 kA/列;辅助负载齿轮传动比:6.94;车轮直径为:850 mm/812.5 mm/775 mm(新轮/半磨损/全磨损),性能计算基于半磨损车轮。
载荷根据列车基本情况,按每人65 kg计算。列车载荷情况如表2所示。
2.2 列车性能要求
列车在均匀的AW4载荷条件下,列车(半磨损轮)应能在干净、干燥的水平直线轨道上以80 km/h的最大设计速度行驶。其中,最大时速:70 km/h(运营速度);80 km/h(设计速度);旅行速度:26 km/h。
在上述情况下,列车性能要求如下。
①初始加速度:在正常网压、不同的载荷工况(AW0到AW4)下,达到线路电流限值的加速度应为(1.1±0.1) m/s2;冲击率限值应为(0.65+0.05) m/s3。
②减速度:达到电流限值的最大减速度范围应为1.1~1.2 m/s2;冲击率限值不大于0.65 m/s3。加速度的计算应考虑列车阻力,减速度的计算则无此要求。同时,尽量提高AW4载荷条件下能够完全以电气方式实现1.1 m/s2减速度的速度值。
③在列车时速大于8 km/h时,不应出现电气制动减弱的现象。
由以上性能要求可知:AW0到AW4载荷对应牵引力需要考虑线路电流限制,加速度的计算应考虑列车阻力,且冲击极限不超过0.65 m/s3。
AW0到AW4载荷对应电制动力的计算同样需要考虑线路电流限制,但不考虑列车阻力的影响,冲击极限不超过0.65 m/s3;同时,恒力速度拐点应尽可能提高,以保证电制动性能的发挥,制动力减弱点不高于8 km/h。
3 牵引/电制动特性设计
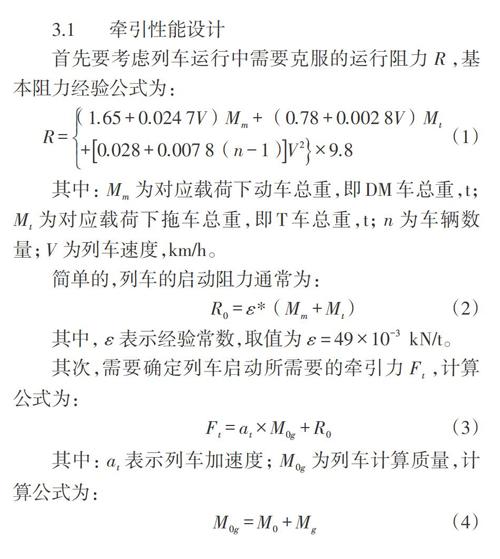
3.1牵引性能设计
首先要考虑列车运行中需要克服的运行阻力[R],基本阻力经验公式为:
其中:[Mm]为对应载荷下动车总重,即DM车总重,t;[Mt]为对应载荷下拖车总重,即T车总重,t;[n]为车辆数量;[V]为列车速度,km/h。
简单的,列车的启动阻力通常为:
其中,[ε]表示经验常数,取值为[ε=49×10-3] kN/t。
其次,需要确定列车启动所需要的牵引力[Ft],计算公式为:
其中:[at]表示列车加速度;[M0g]为列车计算质量,计算公式为:
其中:[M0]为列车对应载荷下的总重;[Mg]为换算质量,计算公式为:
其中:[Mm0]、[Mt0]为空载下动车、拖车的重量,其中动车(DM车)的惯性系数为10%,拖车(T车)的惯性系数为5%;[Nm]、[Nt]分别为动车、拖车数量。
最后,确定粘着系数[δ],计算公式为:
其中:[F]为牵引力或者制动力;系数1.1为考虑动车转动惯量。
3.1.1 恒力区域的牵引力计算。以AW4负载为例计算牵引力:
从而求得每台电机的牵引力为20.78 kN。
由此可初步确定列车AW4载荷时应发挥的牵引力。基于公式(6)和公式(7)可求得不同负载条件下列车牵引力、初始加速度、粘着系数,结果如表3所示。
3.1.2 恒力区域确定。恒力区域按照以下条件确定:①计算线路电压为675 V;②恒力区域由线路电流限制值决定,不包括辅助电源系统(APS)电流。
考虑牵引工况下,线路电流限制值[IX]为2 600 A/列,其中包括APS电流,因此需求解不包括APS电流状态下的线路电流限值。
辅助电源系统(APS)电流[IA]:
其中:[PA]为辅助电源系统总功率;[UA]为工作电压。辅助电源系统总功率,经统计为204.5 kW(考虑损耗),则计算可得[IA]≈303 A。牵引时线路电流限制值[It]:
將相关数据代入式(9)可知[It]为2 297 A。
在限制线路电流下,牵引为额定网压时,牵引系统功率发挥亦被限制,根据能量守恒定理,有
其中:[U]为牵引网压;[It]为牵引时的线路电流;[η]为总效率,通常取0.85,考虑牵引变流器逆变效率、电机效率、齿轮传动效率等;[Ft]为牵引力;[V]为列车速度。
考虑牵引时的线路电流,为保证安全,取10%的线路电流余量,即线路电流上限为2 067.3 A,由此根据式(10)可推知,列车牵引恒力区域速度拐点为26 km/h。图2中,牵引恒力区域为0~26 km/h,进入恒功区域后,功率不变,电压上升趋于稳定,线路电流呈下降趋势,可将恒功速度拐点设定为55 km/h。
3.2 电制动性能设计
列车制动时,优先采用电制动方式,且不需考虑列车的启动阻力与运行阻力,因此可确定列车制动时所需电制动力[Fb],计算公式为:
其中:[ab]为列车的减速度。
3.2.1 制动力计算。制动力计算同样以AW4负载为例,将相关数据代入式(11)可求得AW4负载下列车制动时所需电制动力[Fb]为159.47 kN(单台电机牵引力为19.93 kN)。
由此可初步确定列车AW4载荷时应发挥的电制动力。基于公式(11)及公式(6)可求得不同负载条件下列车电制动力及粘着系数,如表4所示。
3.2.2 恒力区域确定。恒力区域按照以下条件决定:①计算的线路电压是标称电压(750 V);②线路电流限制值为每列2 600 A,包括APS电流。
因为再生功率由APS消耗,通常认为最坏的情况就是APS电流为0 A。考虑制动工况下,线路电流限制值[Ib]为每列2 600 A。
在限制线路电流下,牵引为额定网压时,牵引系统功率发挥亦被限制,根据能量守恒定理,有
其中:[U]为牵引网压;[Ib]牵引时的线路电流;[η]为总效率,取0.85,考虑牵引变流器斩波效率、电机效率、齿轮传动效率等;[Fb]为电制动力;[V]为列车速度。
考虑牵引时的线路电流,为保证安全,取10%的线路电流余量,即线路电流上限为2 340 A,由此根据公式(12)可推知,列车电制动恒力区域速度拐点为46 km/h,电气制动减弱点设定为8 km/h。如图3所示,电制动恒力区域为8~46 km/h。
4 线路仿真分析与验证
4.1 全线路仿真分析
在完成牵引/电制动特性设计后,形成牵引/电制动包络线,由电机供货商提供拟合的电机特性曲线和数据,在列车牵引特性数据、电机数据已知的情况下,按照实际线路条件在MATLAB分析软件上进行全线路仿真分析,分析列车牵引特性能否满足性能需求及线路电流限制[4-7]。最严苛仿真工况结果如表5所示。
表明列车性能可满足旅行速度不低于26 km/h的要求,同时,各项技术参数均能满足要求。
4.2 故障和救援情况仿真分析
通过仿真计算,列车在一辆动车失效条件下,可在坡度为30‰的斜坡上产生0.25 m/s2的加速度,足以保证列车启动。
AW0负载列车(2M1T)推动或拖曳失效的AW4负载列车(2M1T),考虑用高加速牵引模式,即以AW0负载列车上的8台电机,发挥AW4负载情况下的标准牵引力165 kN,推动或拖曳失效的AW4负载列车(停车制动器保持工作)在30‰坡道上启动。
经过验证,列车在故障和救援情况下的性能满足要求。
5 结论
本文以线路电流、粘着系数参数为设计关键点,通过逆向求解法进行特性设计,确定牵引特性曲线恒力拐点速度,进而确定恒功率拐点速度及制动特性恒力速度拐点,再以加、减速度要求和粘着系数限制确定牵引力、制动力的大小,所设计的列车特性更加符合项目实际需求,提高设计效率和可靠性。本文以国外某项目为例,设计的列车特性曲线参数能较好地满足列车牵引、电制动、紧急救援以及线路供电的性能需求,利用MATLAB软件编写的牵引计算与线路仿真软件进行试验,证明了该方法设计的合理性,为后续国外牵引系统项目提供参考。
参考文献:
[1]吴昊.城市轨道列车电力牵引系统设计及仿真[D].成都:西南交通大学,2015.
[2]肖华,陈文光,王龙,等.3M3T城轨列车永磁牵引系统特性设计研究[J].机车电传动,2015(3):65-68.
[3]骆礼伦.城轨列车特性曲线计算系统的实现及应用[J].城市轨道交通研究,2010(4):67-69.
[4] Wei L , Zhang Y , Da S , et al. Study of simulation technology for traction power system of urban rail transit[J]. Journal of Tongji University,2011(8):1161-1166.
[5]韦莉,张逸成,达世鹏,等.城市轨道交通牵引系统仿真技术研究[J].同济大学学报(自然科学版),2011(8):1161-1166.
[6] Wang W , Zeng X , Shen T . FSM-Based Urban Rail Transit Train Tracking Simulation System Design and Implementation[C]// Cota International Conference of Transportation Professionals. 2015.
[7] Wang Guoliang, Zhang Jiye, Xu Xiaohui,et al. The Research on Traction Simulation for a New Hybrid Power Train[J]. Applied Mechanics & Materials,2013(300-301):327-332.
收稿日期:2020-04-09
作者簡介:卢俊(1993—),男,硕士,助理工程师,研究方向:城市轨道交通牵引系统、列车电气控制系统。
