行人过街信号智能优化控制方法探讨
2020-07-03张玉鑫陈雨菲白霄鹏林荟子王悦
张玉鑫 陈雨菲 白霄鹏 林荟子 王悦
摘 要 对行人过街进行精细化信号智能控制研究。基于行人过街特性,研究行人过街速度与数量关系及人车数量换算参数模型;利用视频处理技术,采用yolov3-cuda算法以俯视视角识别行人及各种车辆。以行人最小/大绿灯时间、车辆最小/大绿灯时间、车辆总延误及人车数量换算系数为判定条件,实时得出行人过街最优信号配时方案从而提高道路通行效率。
关键词 视频处理;感应配时;人车协同;人车换算
引言
国内外开展了大量研究,但在行人过街问题上集中为按键式信号控制或固定信号配时方式,缺乏对行人过街数量或过街特性的深层分析,易造成信号空放、行人闯红灯、行人信号不足等问题,致使行人过街混乱、事故频发等,构成“中国式过马路”的国际闹剧[1-2]。基于上述问题,研究行人过街信号智能优化控制至关重要。
1视频图像处理
采用yolov3算法,将图片分割为数个小块,对中心位于其中的物体进行特征分析,对每个小块预测B个bounding box及其置信度(confidence score),并预测C个类别概率。
重点识别person、car、motorcycle、bus、truck五类。考虑到实际使用场合大多为俯视视角,使用官方默认数据集效果不理想,因此在应用中使用针对俯视视角训练的数据集。
其中,通过颜色直方图与位置分析组合的方式区分是否为同一物体,若下一帧中的某一物体在上一帧的同类物体附近,且颜色特征与上一帧中的物体相似即作为同一物体处理,由此测算物体的运动轨迹以及运动状态。由于yolov3处理速率较慢,实际使用yolov3-cuda,accuracy>75%时视为检测成功,在使用cuda的情况下处理速率可达约0.028s/张,可以达到及时(30帧)处理的性能要求[3-4]。
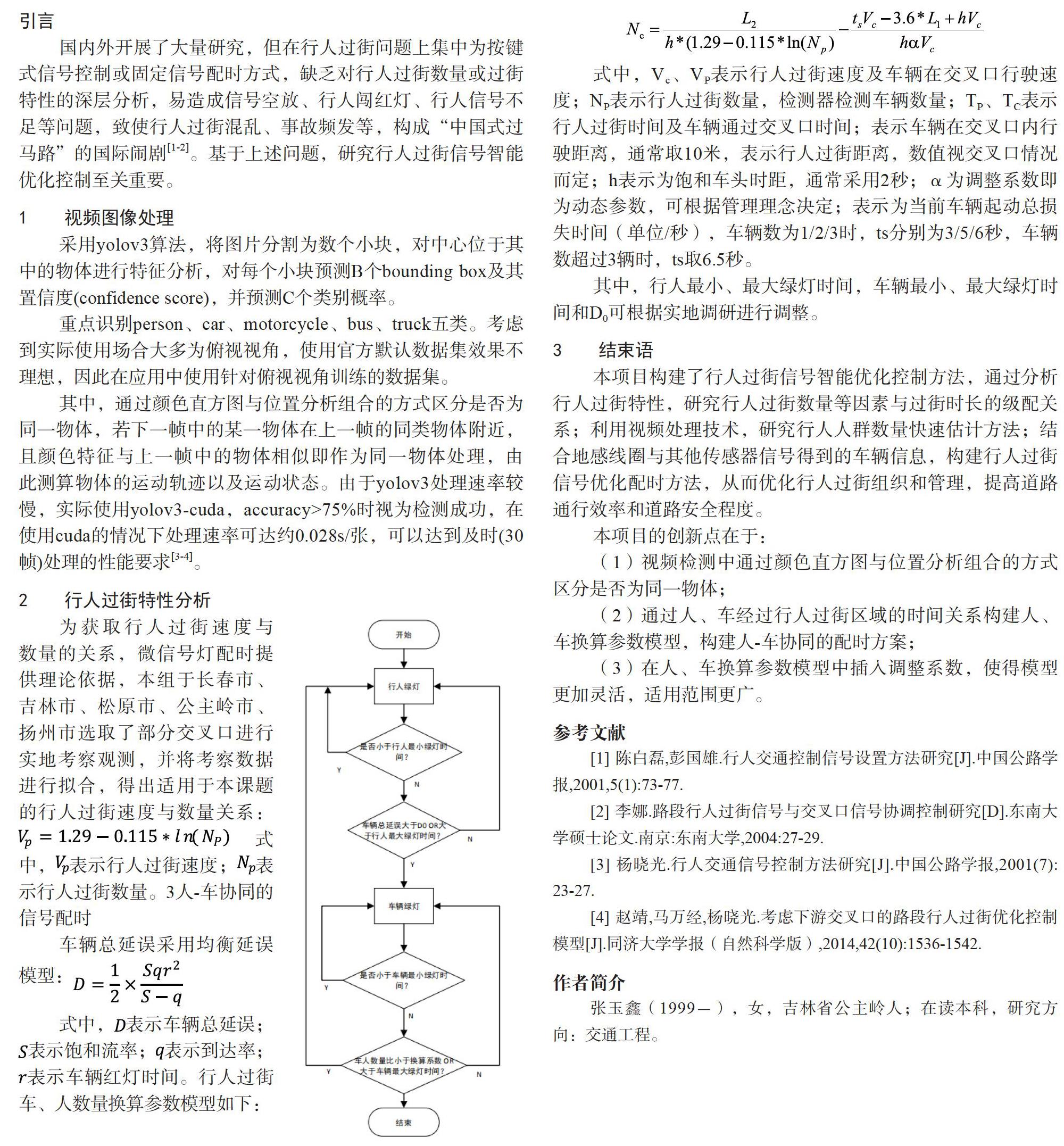
2行人过街特性分析
为获取行人过街速度与数量的关系,微信号灯配时提供理论依据,本组于长春市、吉林市、松原市、公主岭市、扬州市选取了部分交叉口进行实地考察观测,并将考察数据进行拟合,得出适用于本课题的行人过街速度与数量关系:式中,表示行人过街速度;表示行人過街数量。3人-车协同的信号配时
车辆总延误采用均衡延误模型:
式中,表示车辆总延误;表示饱和流率;表示到达率;表示车辆红灯时间。行人过街车、人数量换算参数模型如下:
式中,Vc、VP表示行人过街速度及车辆在交叉口行驶速度;NP表示行人过街数量,检测器检测车辆数量;TP、TC表示行人过街时间及车辆通过交叉口时间;表示车辆在交叉口内行驶距离,通常取10米,表示行人过街距离,数值视交叉口情况而定;h表示为饱和车头时距,通常采用2秒;α为调整系数即为动态参数,可根据管理理念决定;表示为当前车辆起动总损失时间(单位/秒),车辆数为1/2/3时,ts分别为3/5/6秒,车辆数超过3辆时,ts取6.5秒。
其中,行人最小、最大绿灯时间,车辆最小、最大绿灯时间和D0可根据实地调研进行调整。
3结束语
本项目构建了行人过街信号智能优化控制方法,通过分析行人过街特性,研究行人过街数量等因素与过街时长的级配关系;利用视频处理技术,研究行人人群数量快速估计方法;结合地感线圈与其他传感器信号得到的车辆信息,构建行人过街信号优化配时方法,从而优化行人过街组织和管理,提高道路通行效率和道路安全程度。
本项目的创新点在于:
(1)视频检测中通过颜色直方图与位置分析组合的方式区分是否为同一物体;
(2)通过人、车经过行人过街区域的时间关系构建人、车换算参数模型,构建人-车协同的配时方案;
(3)在人、车换算参数模型中插入调整系数,使得模型更加灵活,适用范围更广。
参考文献
[1] 陈白磊,彭国雄.行人交通控制信号设置方法研究[J].中国公路学报,2001,5(1):73-77.
[2] 李娜.路段行人过街信号与交叉口信号协调控制研究[D].东南大学硕士论文.南京:东南大学,2004:27-29.
[3] 杨晓光.行人交通信号控制方法研究[J].中国公路学报,2001(7): 23-27.
[4] 赵靖,马万经,杨晓光.考虑下游交叉口的路段行人过街优化控制模型[J].同济大学学报(自然科学版),2014,42(10):1536-1542.
作者简介
张玉鑫(1999-),女,吉林省公主岭人;在读本科,研究方向:交通工程。
