基于压电驱动的一种新型球状扫描平台设计与分析
2020-07-03韩玉辉吕琼莹王冬梅
刘 宁,韩玉辉,吕琼莹,王冬梅
(长春职业技术学院,吉林 长春 130022)
1 新型球装扫描平台的结构设计
所设计的平台需要采用方位和俯仰运动机构,俯仰角实现±55°水平移动,方位角±170°范围转动,采用压电并联驱动设计[1-2]。设计的一种新型球状扫描平台主要包括内球、外球和执行机构等。由于该平台采用压电堆并联驱动,省去了万向节和编码器,达到了结构简单和减少重。采用Pro/ENGINEER对其数字建模,平台结构如图1所示。
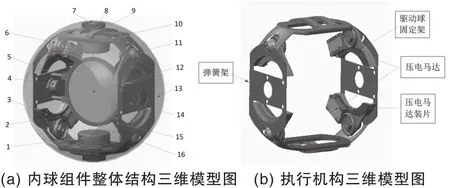

图1 新型球状扫描平台及外框架机构
2 球状扫描平台动力学方程

图2 新型压电扫描平台系统工作流程图
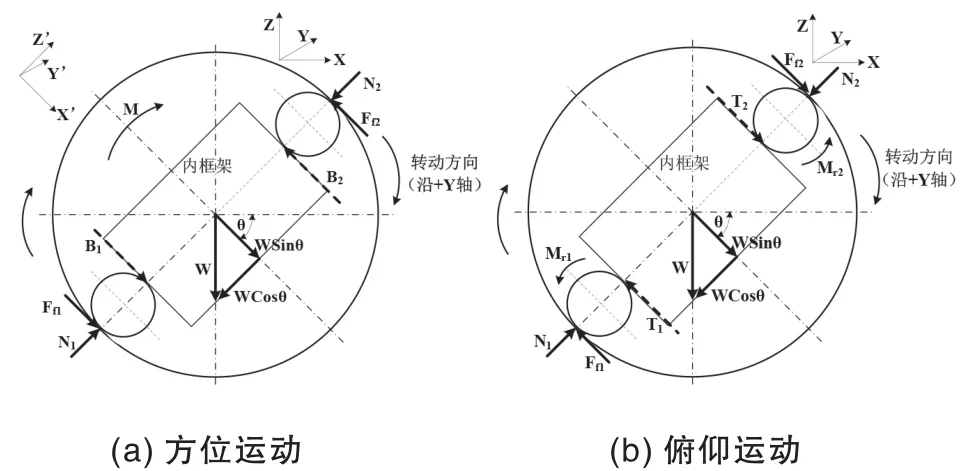
图3 球状扫描平台方位和俯仰运动原理图
P为球体弹性空间任意一点,Q为旋转矩,R为 (X、Y、Z)轴坐标系旋转变换量,XF、YF、ZF为对应各轴角速度坐标,并且让球状扫描机构实现方位运动由Y轴转动Z轴,同理球状转动机构以角位移 和角速-Y旋转,从轴转到Z轴[4],实现俯仰运动如图4所示。

图4 球状扫描平台俯仰和方位运动坐标系


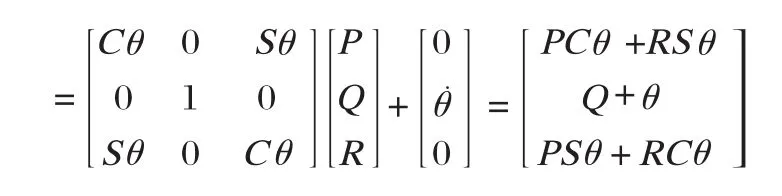
球状扫描仪相对于方位和俯仰位置参考总角速度为:

3 新型球状扫描平台的模态分析
在保证整个平台结构强度、刚度和计算满足前提下,便于后续研究分析,需要将球状扫描平台内部执行机构简化[6-7]。根据理论分析,影响球状扫描平台动力学因素主要来自于内部构件得转动惯量,为了保证球状扫描平台工作时候稳定性,模型转动惯量的质心高度应与实物转动惯量的质心高度保持一致,不用把执行机构里面每一个零部件都画出来[8]。简化模型如下:1)不考虑球状扫描平台执行器框架内组件半径小于3mm的孔,将其填充实心处理。2)将执行器框架内部组件小于3mm倒圆删去。3)执行器内框组件相对于外部组件,刚性和稳定性较好,故简化;简化处理后,新型球状扫描平台执行器简化图如图5所示。
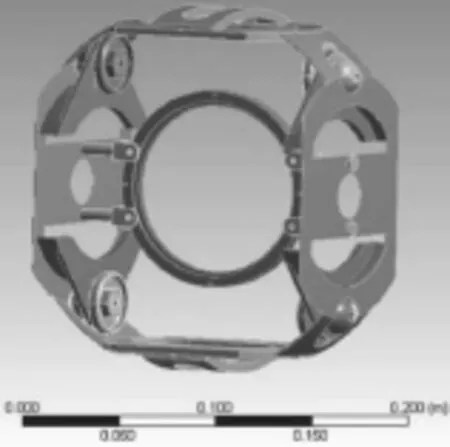
图5 新型球状扫描执行器模型简化图
3.1 模型分析材料的选择
首先对球状扫描平台模型进行简化,转换X_T格式,导入到ANSYS Workbench中,然后给新型球状扫描平台执行机构主要组件赋值材料[9]。该新型平台采用压电并联驱动,由于该软件系统默认没有压电材料,需要自己新建材料,编号采用BI2020。外轮框作为执行机构,为了轻量化,选取SiC/Al复合材。为了便于分析,笔者将所有轴承采用GCr15,根据激光测距仪实际重量换算材料所需材料,所有参数都需要与实物保证相同的转动惯量和质心高度,具体材料如下表1 所示。

表1 选择材料参数
3.2 网格划分
模态分析质量好坏由网格划分质量决定。一般情况下,网格划分越细越好,但计算量也相应加大,还会带来局部震荡,干扰分析精度,从而导致结果失败。因此应根据网格细化分布和网格质量量度取最佳方案[10]。网格划分质量标准主要由单元畸变度和网格质量这2个参数来衡量。网格质量量度越趋向于1,分析效果越好;单元畸变度数值越趋向于0,结果最优。该球状扫描平台首先采用四面体网格划分,网格质量数值为0.48,畸变度数值为0.65,如图6(a)所示。笔者继续采用六面体法进行有限元分析,改进后网格划分图如图6(b)所示;得到该球状扫描平台畸变度为0.46,比四面体网格划分提高20%。网格质量数值0.78,提高了30%。

图6 网格划分
固有频率是机械系统固有属性,当外部刺激频率达到机械系统的固有频率时,会带来震荡对机械结构造成损害。因此在完成产品设计后需要对固定频率进行检测,所做模态分析正是为了找到固有频率以及相对应的振型图。此处给出了球状扫描平台前六阶固有频率如表2所示。
3.3 球状扫描平台内框模态分析

表2 球状扫描平台外框前六阶固有频率
球状平台框架里的测距仪为标准件,本研究主要考量内框架受力形变情况。框架内构件发生变形都会影响测距仪的安装精度和工作可靠性,从而避免因震动带来的破坏效应。为了更好的检测该平台安装面变形情况,所列出球状扫描平台框架前六阶振型图,如图7所示。
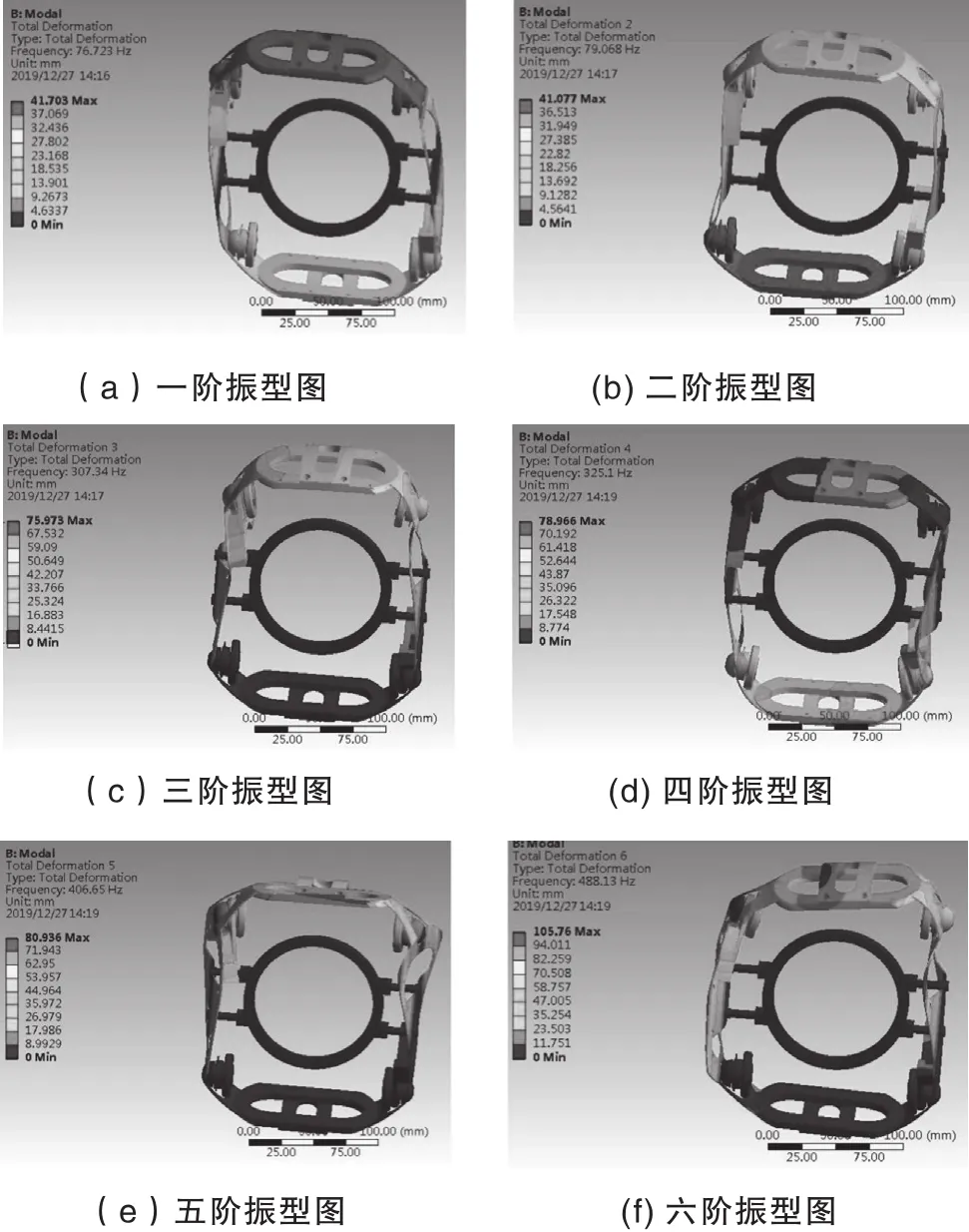
图7 新型扫描平台振型图振型分布
从球状压电扫描平台内框架的振型图分析知:前两阶振型振动频率在1~100Hz之间,为Y轴方向弯曲形变,Y轴旋转导向块与外框连接处受力大;第三、四阶固有频率在200~300Hz,振动频率主要发生在弹簧固定压电外轮廓位置,沿X轴方向弯曲变形最大;最后两阶固有频率在400~500Hz之间,为Z轴纵向弯曲,LRB激光测距仪连接处发生较大形变,内外框连接处出现轻微变形。在整个模态分析过程中,内外框镜头转动机构几乎不受外界干涉,从而保证扫描平台工作稳定性和测量精确度。从图7(f)可以看到,球状扫描平台固有频率都在1Hz以上,1KHz以下,而球状扫描平台干扰频率一般为0.1KHz,压电材料在工作时候的固有频率一般在100KHZ以下,整个结构的最大变形发生在安装激光测距仪连接的弹簧架上,这一变形将影响球状扫描平台工作稳定性和测量精确度,应避免同等振型同等振幅,可见需要继续优化转台和内框构件模态分析重要性。
3.4 球状扫描平台整体模态分析
根据球状扫描平台动力学分析可知,要保证改新型平台内框和外框在一个稳定状态下工作,还需要对平台整体进行模态分析,如图8所示。
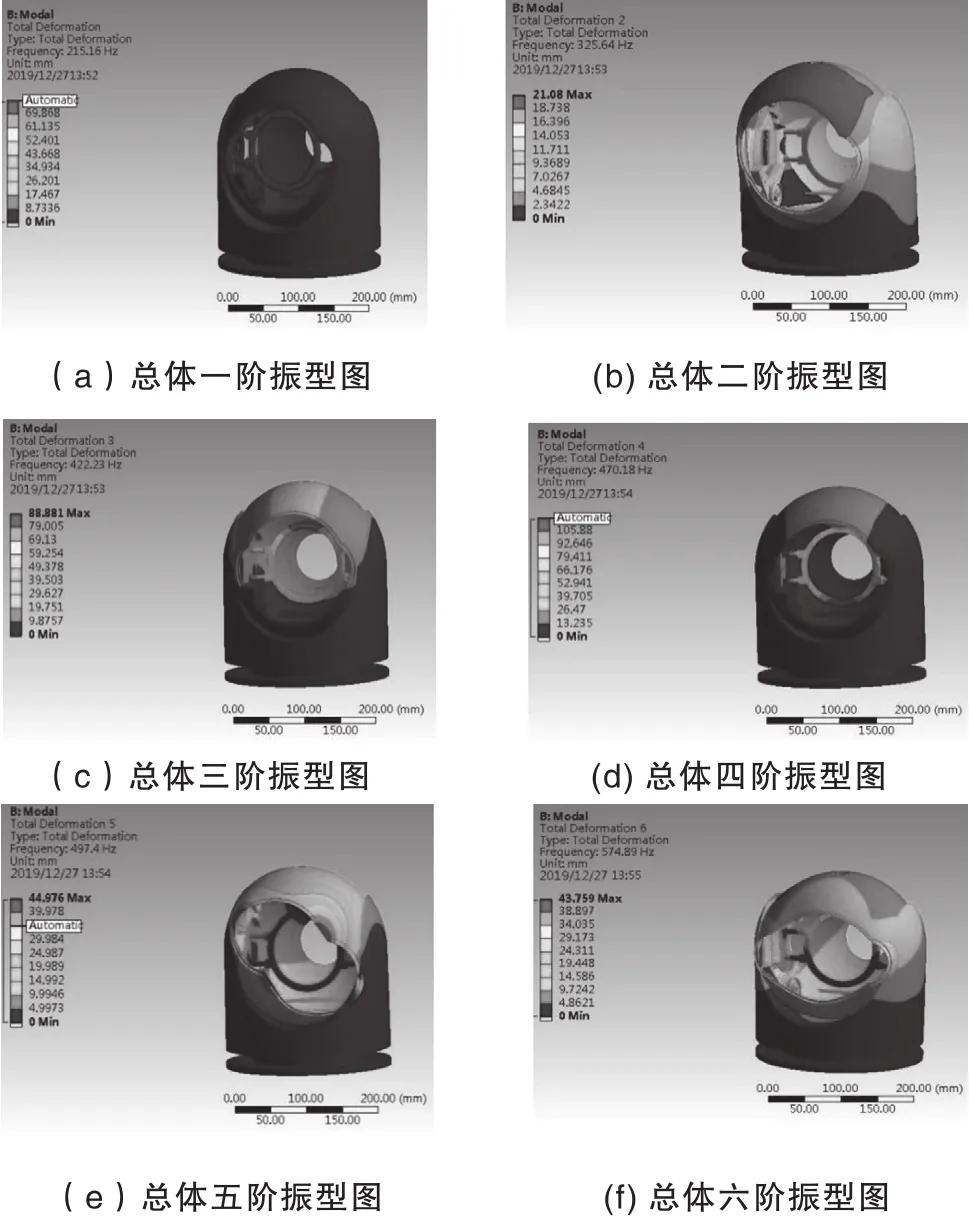
图8 前六阶梯整体模态振型图
从球状扫描平台整体的振型图可以看出:整个机构最大形变基本发生在激光器安装位置和弹簧架部位, 方向弯曲上为主,给平台安装、调试和数据测量带来不确定性,因此必须避开该振型带来有害的振动。从整体前四阶振型云图可以看到,镜头托架和镜头外框连接处发生轻微形变,发生部位在该扫描平台工作转镜时候变形最大;从第五、六阶振型云图可以看出发生变形主要来自球体扫描平台工作时候转动和弹簧方向弯曲。
修改建议为:根据高阶模态分析结果,结合结构动力调整要求,增加内框激光测距仪安装位置固定板厚度,增强安装板刚度,从而提高激光测距仪位置固定稳定性,进而提高测距精度,减小误差;通过增加弹簧托架厚度和刚度,从而减小球状稳定平台在工作时转镜在 轴方向的位移量。
4 试验
加工精度和装配精度是2个重要的参数,直接影响该平台工作时测量精度和基准不重合误差,笔者设计球状扫描平台外径为240 ,通过运用 扫描成像仪器对该扫描平台外轮廓模型多次进行扫描,如图9、10所示。

图9 点云处理前模型

图10 点云处理后模型
笔者多次利用点云处理软件对处理后的模型进行直径检测,得到数值跟设计模型比对,并进行误差分析,并为后续的研究提供理论基础。依据球状外轮廓,笔者随机取前10次测量值,将测得结果与240 对比,并计算实际误差,如表3所示。
则:
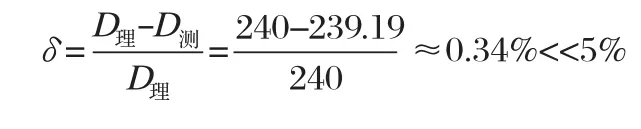
根据结果可知,在国家允许装配误差的5%以内,符合该新型球状扫描平台设计标准,同时也满足球状内轮廓和外轮廓装配精度要求,为此笔者做出了实物,如图11所示。
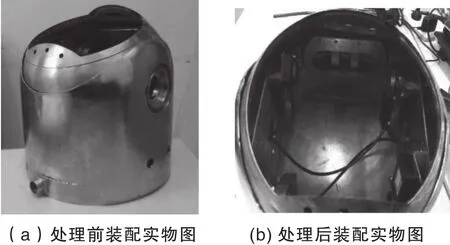
图11 整体装配好的实物图
5 结论
本文设计了一种基于压电驱动的新型转台机构,首先对该平台进行有限元建模,简化后导入Ansys Workbench进行模态分析,获得该球状扫描平台内轮廓和整体扫描平台的前六阶振型图,得到了内框和外框在扫描转动过程中发生震动和变形,通过对模型进行分析,再次基础上进行优化再设计,并对压电球状扫描机构进行误差和精度分析,为此做出了实物,通过比较加工部件和原理模型的比较,误差范围符合工程要求;同时,也为解决此类问题提供了一种技术验证手段。

表3 该平台外轮廓直径前10次测量值
