高动态RDSS 短报文通信入站信号的频率补偿研究
2020-07-03伍蔡伦李胜军
王 刚,周 云,伍蔡伦,李胜军
(1.中国电子科技集团公司第五十四研究所,石家庄 050081;2.卫星导航系统与装备技术国家重点实验室,石家庄 050081;3.陆装驻石家庄地区第一军代室,石家庄 050081)
0 引言
北斗导航系统经历了三个发展阶段,即,北斗一代试验导航系统、北斗二代区域导航系统、北斗三号全球导航系统。北斗一代试验导航系统的工作体制为RDSS有源服务体制,提供定位、授时、短报文通信等功能。北斗二代区域导航在保留RDSS 的基础上,新增了RNSS 服务,二代系统星座由三类卫星组成,地球静止轨道卫星(GEO)、倾斜地球同步轨道卫星(IGSO)和中圆轨道卫星(MEO)[1],其中GEO 卫星为1–5号卫星,提供RDSS 与RNSS 服务,其他两类卫星只提供RNSS服务。北斗三号为新一代全球导航系统,在继续保留了二代RDSS 的入站信号Lf0的基础上,新增了三个频点的上行入站信号Lf1,Lf2,Lf3,其中Lf0主要用于过渡二代导航设备,Lf1,Lf2为民用信号,Lf3为军用信号,卫星星座组成与二代导航系统一致。
RDSS 基本业务包括定位、位置报告、授时及短报文通信等,其中,短报文通信服务一般用于静态应用场景中,在高动态场景的应用研究还较少。本文在北斗二代导航系统的基础上研究了高动态下RDSS 短报文通信信号的入站问题,利用RNSS 的定位、测速功能,对RDSS 的入站信号频率进行了补偿,并在工程化中实现,目前已成功用于某型号火箭的位置报告服务中,对火箭残骸回收提供有力的技术支撑。
1 高动态下RDSS 入站信号频率分析
RDSS 短报文通信系统包括发送终端、GEO 卫星、地面中心站、接收机终端四部分。发送终端将短报文信息通过L 波段信道发送给GEO 卫星,通过星上的L/C透明转发器转为C 波段信号送至地面中心站,之后地面中心站对收到的信号、信息进行核验,如果满足条件则再经过C 波段上行信道发送至GEO 卫星,GEO 卫星再通过C/S 透明转发器发送给目标接收终端,即完成短报文信息的传输,原理框图如图1所示。

图1 RDSS通信示意图
发送终端中短报文与伪随机码先进行扩频调制,之后再与载波信号进行BPSK 调制,因此,影响北斗RDSS 信号入站的因素主要有:信号发射功率、载波伪码相位一致度、载体运动速度,其中,信号功率与载波伪码相位一致度由设计保证。
在高动态下,主要考虑速度的影响,速度与多普勒的关系如下所示:

式中,c 为光速;fd为多普勒频率;f 为载波频率。二代RDSS 信号的L 波段上行频率为1,615.68 MHz,地面中心站的入站动态范围为±6 kHz,按上式计算出速度约为1,114.08 m/s,由此可以看出,当目标运动速度相对于卫星的径向速度高于1,114.08 m/s 时,会导致地面中心站接收不到下发的信息,因此,为了保证RDSS 短报文通信的成功,需要对载体多普勒频率进行补偿。
2 高动态下RDSS 入站信号多普勒频率补偿
2.1 多普勒频率的获取
RDSS 入站频率的补偿来源为RNSS 对高动态载体的多普勒测量结果,根据RNSS 的收星状态分为两种情况:
(1)RNSS 接收通道中不存在GEO 卫星,则通过载体位置、速度信息计算多普勒频率,间接补偿至上行入站信号。载体位置的确定采用四站定位的原理,先对至少4颗北斗卫星利用伪码相关进行伪距测量,得到伪距值ρ,设载体的三维位置(xu,yu,zu)和钟差tu,则伪距与用户位置及用户钟差信息的关系[2]为

卫星位置(xs,ys,zs)可以从导航电文星历参数解析获取,c 为光速,然后利用最小二乘算法即可以求出用户的位置及钟差。
在获得用户位置信息之后,RNSS 载体速度的测量主要利用多普勒观测量的方法实现,为表述方便,RNSS接收多普勒频率为frd,RDSS 发射多普勒频率为fsd。
接收多普勒frd可以通过读取RNSS 接收通道中载波NCO 的锁存值,将其转换成频率后与标称中频值fc相比较获得,公式为

式中,Ncycle为载波整周计数;Nnco为载波相位计数;M 为载波相位累加器位数。


换算成相对于GEO 卫星的发射多普勒频率

式中,fl为二代RDSS 上行频率;c 为光速,即可求出需补偿的多普勒频率。
(2)RNSS 接收通道中跟踪到了具有RDSS 服务的GEO 卫星,此时fsd与frd相同,则从通道中的载波跟踪环提取对应GEO 卫星的载波相位信息,按公式(3)计算出的频率即为需要补偿的多普勒频率。
2.2 多普勒频率的补偿
RDSS 信号体制为BPSK 调制,生成上行RDSS 频率的方式一般采用二次变频[4]的方式实现,如图2所示:
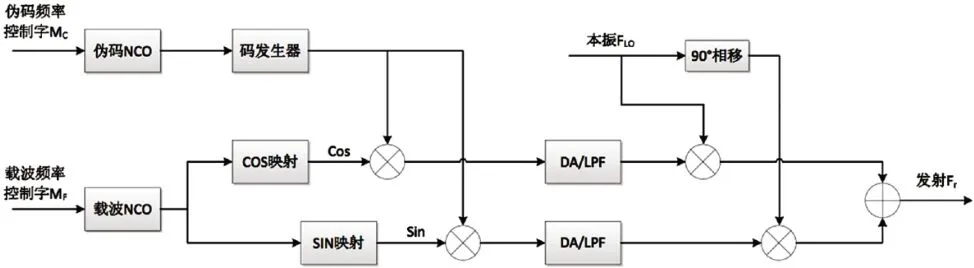
图2 RDSS动态补偿方案原理框图
图2 中,伪码NCO 生成码发生器的时钟速率,控制码发生器生成二进制伪码,之后再与载波NCO 生成的正交中频信号进行调制,接着将其进行DA 变换为模拟信号并通过低通滤波器滤除掉镜像信号,最后与本振信号二次调制实现最终RDSS 的入站信号。结合以上分析,对于高动态的载体,只需将发射多普勒频率折成所需的频率控制字即可实现多普勒频率的补偿。
载波频率控制字[5]为

伪码频率控制字为

式(7)、式(8)中,fb,N,fs,fl,fcode均为已知量,分别为载波中频调制频率,NCO 相位累加器位数,NCO工作频率,RDSS 入站信号Lf0的频率以及扩频伪码的频率。
3 工程实现方案及测试结果
实际应用为高动态箭载场景,RNSS 采用双天线合路的方式保证收星情况,接收GPS L1信号及BD 二代系统B1频点信号,RDSS 采用双天线轮流发射的方式发射入站信号。
发射硬件平台采用FPGA+DSP+AD9364 的架构,FPGA 主要实现一次变频、通道跟踪的功能,DSP 主要实现定位、速度及多普勒频率的计算,AD9364主要实现二次变频生成上行RDSS 入站信号。工程实现框图如图3所示。
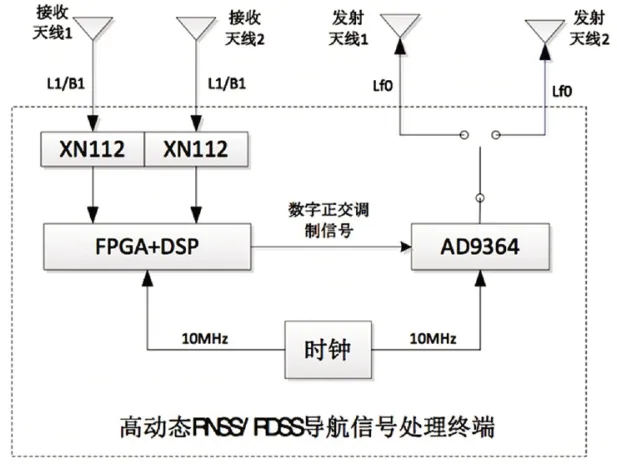
图3 RDSS动态补偿工程实现原理框图
图3 中有源天线接收导航信号L1,B1,之后经过综合射频电路XN112输出数字中频信号至FPGA,接着FPGA 与DSP 联合完成捕获、跟踪、电文解调、定位解算、速度解算、多普勒计算等,然后按照式(7)、式(8)计算出需要调整的伪距和载波NCO 频率控制字,再通过FPGA 实现一次正交变频、AD9364二次变频以及开关切换策略等,最终将RDSS 入站信号发送出去。为了保证补偿的正确性,在地面搭建了测试系统对补偿方案进行了验证,测试系统的原理如图4所示。
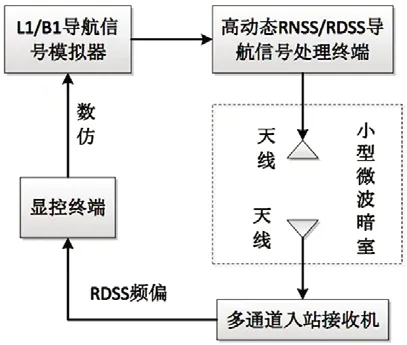
图4 地面测试系统原理框图
图4 中,卫星导航信号由显控终端中的数仿软件控制L1/B1导航信号模拟器输出,之后经过高动态RNSS/RDSS 导航信号处理终端进行定位、测速、多普勒频率补偿、调制、变频生成RDSS 入站信号,接着在小型微波暗室由发射天线变为无线信号,随后RDSS 无线信号由同在小型微波暗室的入站接收机天线接收,经入站接收机解析处理之后,获得RDSS 入站信号的多普勒频偏、功率电文等信息,送入显示控制终端显示,实物如图5所示。

图5 地面测试系统
试验时设置模拟器场景为箭载动态场景,L1,B1频点均开启,在未加入补偿策略之前,显控终端无数据输出,表明RDSS 入站信号未能成功接收,入站失败。在加入补偿策略之后,显控终端存在数据输出,记录多通道入站接收机输出的多普勒频偏数据,结果如图6所示。

图6 多普勒测试结果图
图6 中横轴为采样间隔30 s 每次,纵轴为多普勒偏移,由图中可以看出,多普勒频移的范围为几百赫兹,显然明显小于±6 kHz,由此可以证明补偿策略的正确性。
之后经过实际的飞行验证,短报文信息能准确地传输下来,根据理论设计,应收到短报文信息26条,实际收到18条,接收成功率70%,因箭体在下落过程中,存在姿态失稳阶段,此时发射天线不能有效对准GEO 卫星,会导致RDSS 信号没有被成功接收。经过RDSS 短报文发送的载体速度测试结果如图7所示。
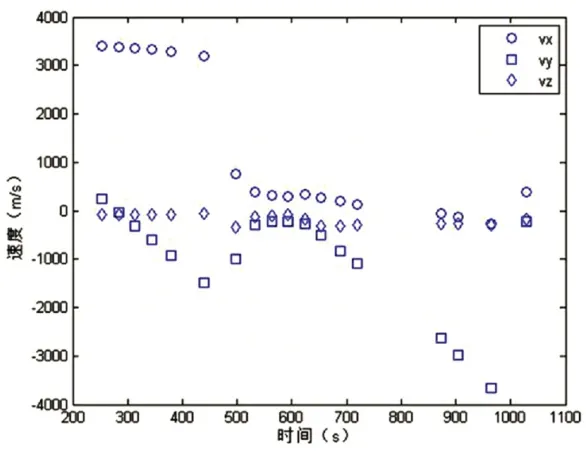
图7 载体飞行速度
图7 中采样间隔30每次,Y 向载体速度最大处可达到3,660 m/s,超过了可允许的入站速度范围,如果不进行补偿的话,就会造成数据的缺失,严重影响对航迹的分析及载体落点的控制等任务。
4 结束语
本文针对RDSS 短报文通信信号的入站问题,分析了高动态条件下的频率补偿问题,经过地面测试及实际飞行结果表明,该多普勒频率补偿方案在高动态条件下可以成功实现RDSS 信号的入站接收。
