登月助力航天服机械结构优化设计及有限元分析
2020-07-02王君尧戴跃洪李照阳
王君尧,戴跃洪,李照阳,唐 鹏
(电子科技大学航空航天学院, 成都611731)
1 引言
随着月表探索活动的展开,舱外作业范围不断扩大,作业复杂度不断提高,作业数量也不断增加。 诸多工作(如设备维修、货物运输和科学实验等)需航天员到高辐射、高真空的舱外环境开展[1]。 航天服为航天员舱外活动提供生命保障,但服内气压对人体各关节运动的阻碍成为航天员必须克服的困难[2-3]。 登月助力航天服是将助力外骨骼技术运用到现有的航天服上,辅助航天员实现抓、举、抬、拉等动作,增强其负载能力及运动能力,以提高舱外作业效率、减少航天员的舱外能量消耗和作业风险[4-5]。
目前,国内外设计了多款外骨骼结构并对其进行了性能分析。 Judnick 等[6]提出的机械反压方案对人体局部起到了抗压防护作用,但造价较高;唐志勇等[7]设计了一种军用的下肢外骨骼机器人,主要为行军过程中的士兵提供负载能力;孙明艳等[8]设计了一种下肢外骨骼装置,并验证该装置与人体的行走姿态具有良好的跟随性;张楠等[9]将设计的外骨骼机器人导入到Adams 中进行动力学仿真,得到外骨骼机器人关节的动力学参数,并依次对该结构进行了改进和优化;高羽翯等[10]对外骨骼机械结构进行优化设计,验证了驱动布置和结构优化的合理性;Li 等[11]针对外骨骼研究中的一些关键问题,指出了控制外骨骼的难点所在。
本文结合人体关节模型,进行二代登月助力航天服关节自由度设计,优化其结构;使用Pro-E绘制一代和二代登月助力航天服的三维模型,并对其进行静力学分析,得到其在负载况下的应力情况和变形情况;对两代登月助力航天服进行模态分析,得到其固有频率。 研究结果将对登月助力航天服的机械结构设计及优化、负载重力分配等问题提供理论依据。
2 二代登月助力航天服
登月助力航天服综合运用了机械、传感、控制、能源和材料等技术,构建航天员可穿戴的运动和作业辅助系统,能够主动感知航天员的运动状态和趋势,通过各关节执行随动控制提供实时助力,提高航天员在月球表面的舱外活动能力。 登月助力航天服的设计需考虑人机耦合问题,不能使其对人体的运动产生阻碍作用[12];自身质量也是评价登月助力航天服的重要指标之一;更轻巧、更合理的结构设计将减轻电机助力的负担,增加登月助力航天服的负载能力[13],使负载分配更为合理[14-15]。
二代登月助力航天服的自由度及结构设计如图1 所示,包括:①肩关节。 根据仿生学设计,肩关节呈球状结构,使肩关节可绕3 个运动轴做内收/外展、屈/伸、环转/回旋的运动[16]。 二代登月助力航天服肩关节采用3 个相互独立的转动副设计。 由于在行走过程中,手臂运动主要集中在矢状面摆动及抓、举、抬、拉等动作,为简化结构,将肩部结构设计为矢状轴和垂直轴3 个方向的转动副,并在屈/伸转动处添加主动驱动;②髋关节。与肩关节相似,关节呈球状结构。 行走时髋关节仅会产生小幅度的内旋和外旋的运动[16],对步态行走影响甚小,运动主要集中在矢状面,因此仅在髋关节屈/伸转动处添加主动驱动;③踝关节。 使脚步绕额状轴在矢状面内和绕额状轴在冠状面内做转动[16],因此踝关节由2 个转动副组成。 正常踝关节背伸可达-20°,跖屈可达50°,约有70°的活动范围,为防止意外,避免失效情况下意外的发生,在踝关节处采用了机械限位;④膝关节。 小腿可绕膝关节的额状轴在矢状面内作屈/伸运动,运动范围为-120°~5°。 在小腿屈曲后可绕垂直轴作微小的旋转,但在一般情况下,仅认为膝关节具有屈/伸自由度[16]。 二代登月助力航天服在膝关节处添加转动副设计,并添加主动驱动,同时在前侧采用机械限位;⑤肘关节。 肘关节与膝关节相似,只有屈/伸自由度,为单自由度转动[16],运动范围为0°~150°,为辅助航天员搬抬重物,将二代登月助力航天服肘关节设计成一个转动副并添加主动驱动和机械限位。

图1 二代登月助力航天服模型Fig.1 Model of the 2nd generation Lunar Assist Spacesuit
在使用过程中,一代登月助力航天服暴露出自身质量重,载物台(图2⑥)与背部竖板的连接处应力集中等问题。 同时,仅靠骨骼服上的固定板与航天员相固定并不是很牢固,当航天员穿着一代登月助力航天服负载过重时,会出现人机分离的情况,且当航天员穿做出特定动作如深蹲等时会出现重心不稳。 基于以上原因,二代登月助力航天服进行了如下方面的改进:①上、下肢结构采用2 个带有一定弧度的弯杆连接,使结构与穿戴人员身体更加贴合,增加了穿戴舒适度;②优化各杆件结构,使航天服外骨骼自重更轻。 取消一代登月助力航天服载物台设计,实际应用过程中发现,二代登月助力航天服将重物直接放在腰杆位置,即可实现负载功能。 此优化大大降低了二代登月助力航天服的质量,优化后的航天服质量仅为13 kg,较一代登月助力航天服质量降低了35%;③优化杆件结构,使得负载质量更多地分配到大腿杆上,负载分配更为合理,进而改善了一代登月助力航天服变形和应力集中的情况;④增加肩部固定环,避免航天员下蹲或背负较大负载时,整体重心后移而摔倒,保证了登月助力航天服在工作时的稳定性;⑤增加一个转动自由度到手腕与扶手结构处,使得航天员的手部可以更灵活地活动。
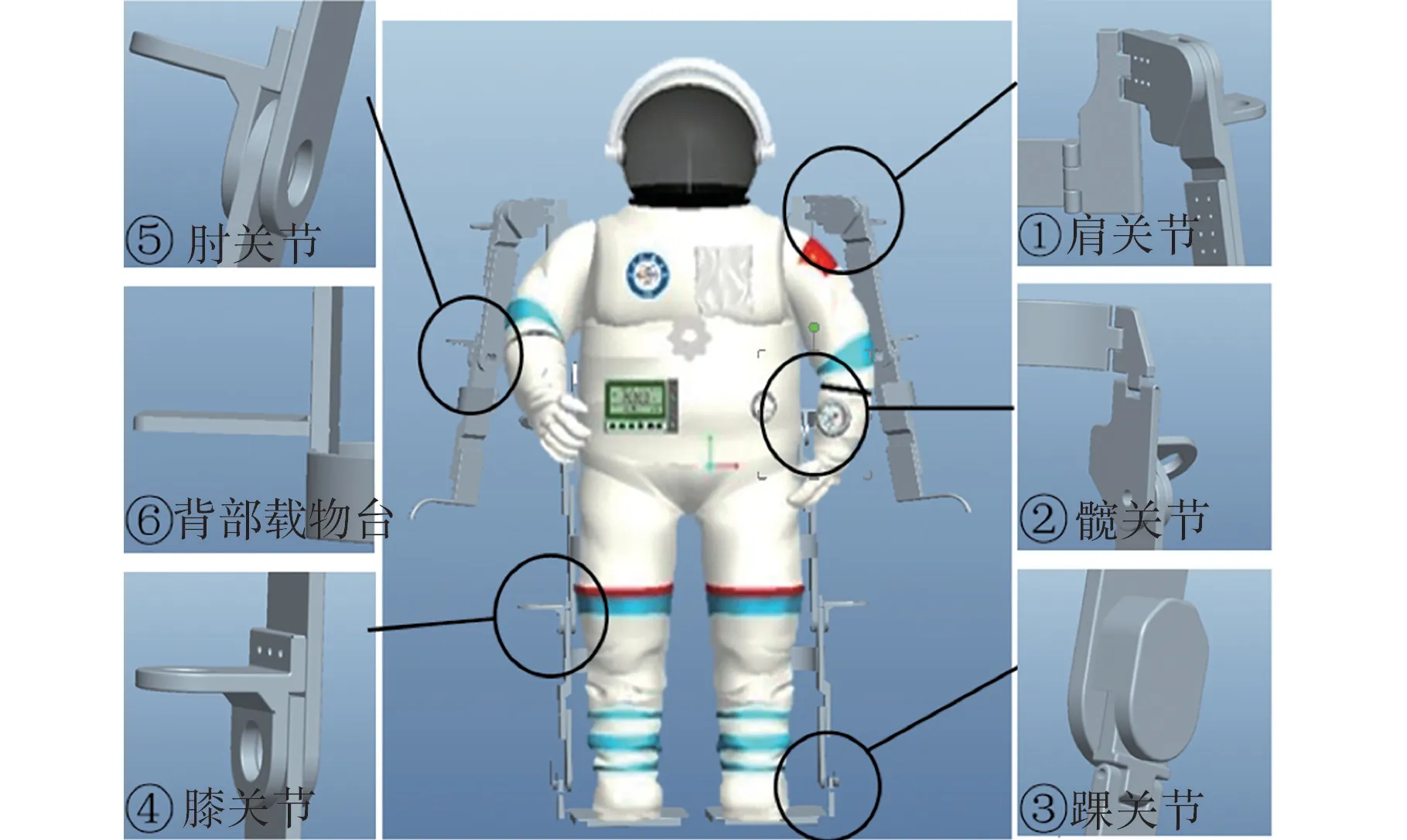
图2 一代登月助力航天服穿戴示意图Fig.2 Schematic diagram of the 1st generation Lunar Assist Spacesuit Donning
3 性能分析
以登月助力航天服杆件及关节处的变形量及无约束状态下的固有频率为准侧,比较两代登月助力航天服的性能,判断分析结果是否在其材质铝合金的极限范围内。 登月助力航天服要求:自身质量≤25 kg,承载能力≥90 kg,本文先使用ANSYS Workbench 中的Static Structural 模块对结构进行静力学分析,对结构分别施加从15 kg到105 kg的负载以模拟登月助力航天服负重情况,以检验登月助力航天服的负载能力及应力应变集中情况。 再使用Modal 模块对结构进行模态分析,分析对比两代登月助力航天服的固有频率及振型。
3.1 网格划分
使用Pro-E 软件绘制一代、二代登月助力航天服外骨骼结构,将绘制好的模型导入到ANSYS Workbench 中,进行网格划分。 对结构进行网格划分是建立登月助力航天服有限元模型的关键步骤。 由于登月助力航天服结构较为复杂,划分网格前对不影响结果的结构进行前处理,可以在保证精度的同时提高模型的计算速度。 具体简化如下:肘、肩、髋、膝、踝关节杆件的螺栓孔简化为圆通孔;删除其余螺栓孔及固定螺钉;修改各杆件连接方式为刚性连接;删除圆角、倒角等结构。
对结构的材料进行参数设置。 两代登月助力航天服的材料均为铝合金,材料属性如表1 所示。
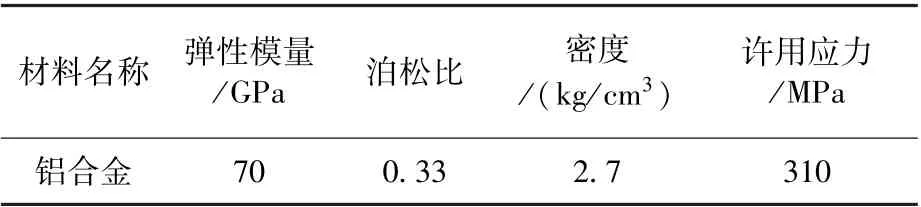
表1 登月助力航天服用铝合金材料属性Table 1 Aluminium Alloy Properties of Lunar Assist Spacesuit
考虑到结构不规则的几何外形,划分尽可能均匀且合理,对结构采取整体自动划分。 一代登月助力航天服节点数为274 982,单元数为145 630。 二代登月助力航天服节点数174 236,单元数为88 771。 网格划分结果如图3、图4 所示。
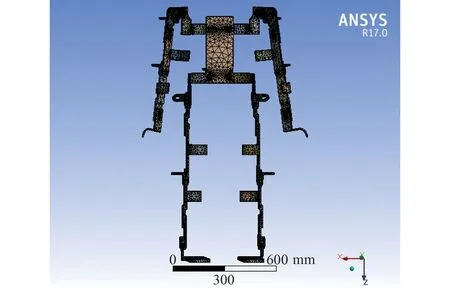
图3 一代登月助力航天服网格划分Fig.3 Mesh of the 1st generation Lunar Assist Spacesuit
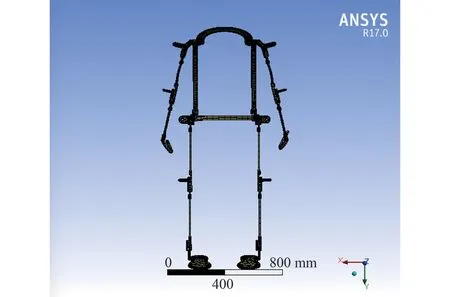
图4 二代登月助力航天服网格划分Fig.4 Mesh of the 2nd generation Lunar Assist Spacesuit
3.2 静力学分析
有限元法以微分单元体为媒介,分析了单元体的变形、平衡和应力应变状态[15-16],校核单元体是否具有所需要的强度和刚度,为结构力学的问题提供了理论基础[17]。
对一代、二代登月助力航天服脚底施加固定约束,模拟其站立工况。 对其整体施加垂直向下,加速度为1g的重力,模拟其自重。 在一代登月助力航天服载物台位置,二代登月助力航天服腰杆位置分别施加方向为垂直向下,大小为15 kg 到105 kg 的均布载荷以模拟不同负载情况下登月助力航天服的静力学特性。
图5、图6 为负载为90 kg 情况下,两代登月助力航天服的总体变形分布云图。 一代登月助力航天服的变形主要发生在载物台上,载物台端部附近形变最大达到1.72 mm,后背竖板及腰部连接处也有不同程度的变形;二代登月助力航天服的变形发生在髋关节附近,最大变形位置发生在腰部连杆,变形量仅为0.22 mm,大腿杆也有小幅度变形。 在负载为90 kg 时,二代登月助力航天服的最大变形量仅为一代登月助力航天服最大变形量的12.8%。
图7、图8 为负载为90 kg 的情况下,两代登月助力航天服的应力分布云图。 一代登月助力航天服最大应力为265.49 MPa,在载物台与背部竖板连接处发生应力集中分布;二代登月助力航天服最大应力为37.932 MPa,分布在腰杆及大腿杆,并无应力集中的情况。 二代登月助力航天服的最大应力仅为一代登月助力航天服的14.3%。
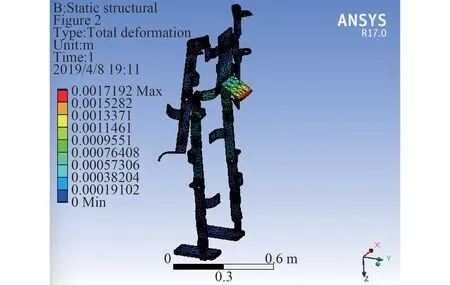
图5 一代登月助力航天服位移云图Fig.5 Total Deformation of the 1st generation Lunar Assist Spacesuit
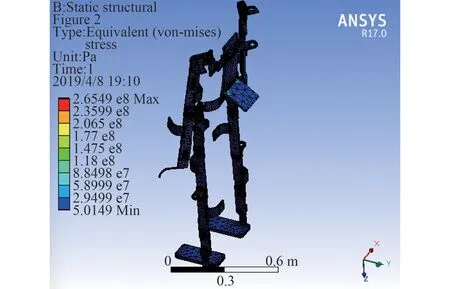
图7 一代登月助力航天服应力云图Fig.7 Equivalent Stress of the 1st generation Lunar Assist Spacesuit
图9 表示两代登月助力航天服随着负载变化的最大变形。 可以看出,随着负载增加,两代登月助力航天服的最大变形都随之增加。 但相同负载情况下,二代登月助力航天服的最大变形量远低于一代登月助力航天服。

图8 二代登月助力航天服应力云图Fig.8 Equivalent Stress of the 2nd generation Lunar Assist Spacesuit
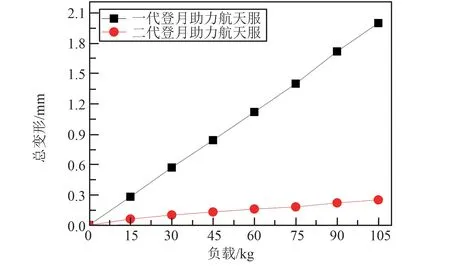
图9 负载对登月助力航天服总变形的影响Fig.9 Effect of Load on Total Deformation of Lunar Assist Spacesuit
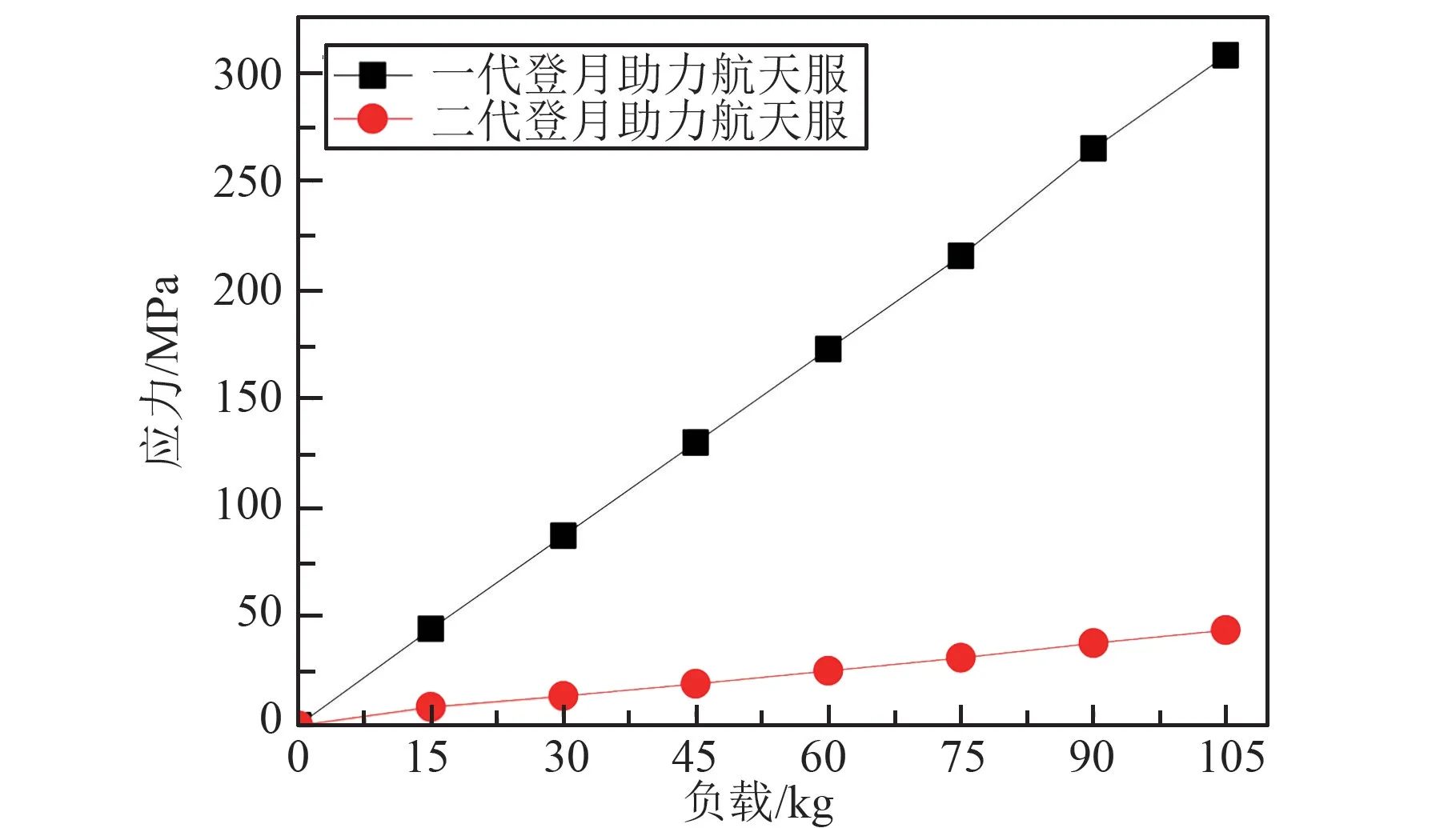
图10 负载对登月助力航天服最大应力的影响Fig.10 Effect of Load on Equivalent Stress of Lunar Assist Spacesuit
图10 表示两代登月助力航天服随着负载变化的最大应力。 可以看出,随着负载增加,两代登月助力航天服的最大应力都随之增加。 当负载达到105 kg 时,一代登月助力航天服的最大应力达到了308.38 MPa,已经接近铝合金的许用应力。而此时二代登月助力航天服的最大应力仅为43.39 MPa。 相同负载情况下,二代登月助力航天服的最大应力远低于一代登月助力航天服。
二代登月助力航天服外骨骼结构的杆件更细,但是承力能力要优于一代登月助力航天服,这是因为一代登月助力航天服的载物台可近似看作悬臂梁结构,应力集中在载物台与背部竖板的连接处;二代登月助力航天服的腰杆可近似看作为简支梁,其所受的载荷可等效到2 个支座上,即2个大腿杆上,由大腿杆轴向方向受力,进而将载荷传到地面。 从变形和应力云图可以看出,二代登月助力航天服的大腿杆分担了腰部负载的质量,并产生了一定的变形,如此设计使得负载分配更加合理。
3.3 模态分析
根据机械结构的模态分析方法[18],登月助力航天服在使用过程中可以简化为振动系统。 在忽略自身的阻尼并采用自由振动方式建立模型时,可根据式(1)计算登月助力航天服的各阶振型及固有频率:

其中,K为刚度矩阵,M为质量矩阵,ωi为登月助力航天服的第i阶固有频率。
为提高登月助力航天服的工作可靠性,本文借助ANSYS Workbench 软件中的Modal 模块对两代登月助力航天服进行模态分析。 采用自由模态分析方式,其计算结果在理论上可以通过数学建模的方法获得其任何有约束的特性,而使用约束模态分析则无法得到自由状态模态分析的特性[18]。 因此,在无约束状态下使用有限元模态分析方法计算登月助力航天服的固有频率具有一定的理论指导作用。
提取两代登月助力航天服的前15 阶模态频率,各阶固有频率及振型如表2 所示。 两代登月助力航天服刚体前三阶振型为刚体平动,可忽略不计。 在第5、6、7、9、13 阶两者振型出现差异。图11、图12 为两代登月助力航天服第5、6、7、9、13 阶的模态频率及振型云图。
图13 为两代登月助力航天服固有频率的随阶次变化的情况。 阶次相同情况下,二代登月助力航天服具有更低的固有频率。 将来拟在肘、肩、髋、膝关节处添加盘式电机,以实现对航天员的关节运动助力。 因此,在满足关节转动功率的情况下,所选电机的频率应避开航天服的固有频率。所得结果对航天服的关节控制电机的选取提供了一定依据。

表2 两代登月助力航天服各阶固有频率及振型比较Table 2 Natural Frequency and Modal of the 1st and the 2nd generation Lunar Assist Spacesuits

图11 一代登月助力航天服振型云图Fig.11 Modal nephogram of the 1st generation Lunar Assist Spacesuit
4 结论
1)对二代登月助力航天服进行优化设计,优化后的二代登月助力航天服质量降低了35%,并在肘关节、膝关节及踝关节进行机械限位。
2)在负载90 kg 的情况下,二代登月助力航天服的最大变形量和最大应力仅为一代登月助力航天服的12.8%和14.3%;当负载质量达到105 kg时,一代登月助力航天服载物台处接近铝合金材料的应力极限308.38 MPa,二代登月助力航天服的最大应力仅为43.39 MPa,且无应力集中情况。
3)相同阶数下,二代登月助力航天服具有更低的固有频率,所得结果对航天服的关节控制电机的选取提供了一定依据。
