一种中药自动拣药配药机的设计
2020-06-30赵卫东孟琪朱艳华
赵卫东 孟琪 朱艳华


摘要:介绍了一种中药自动拣药配药机的设计,它主要由推拉药斗的电动推杆,药品爪,集药装置,抓取药品机械手,封口装置,控制系统等组成,针对处理后的药材进行拣药配药。本设计还分别对于电动机,机械手,控制系统,以及安全性能部分做了具体的计算说明,达到合理的设计方案选择。对于机械手的设计运行过程以及可编程控制的优势做了详细的说明介绍。
关键词:机械手;药品爪;可编程控制;电动机;
1 引言
中医是我国三大国粹之一。我国中医药资源极其丰富,中药文化源远流长。与西药对比,中医药有着疗效好,副作用小,容易接受,治愈彻底等特征,因此被我国乃至全国人民广泛使用。但是中药的配制还是沿袭传统的手抓方式,为摆脱中药落后的拣药配药模式,中药自动拣药配药系统的研制非常紧急。针对上述情况,设计了一种中药自动拣药配药机。将在一定水平上解放大量的人力物力,并可实现远程操和统一控制。
2 机械主要结构设计
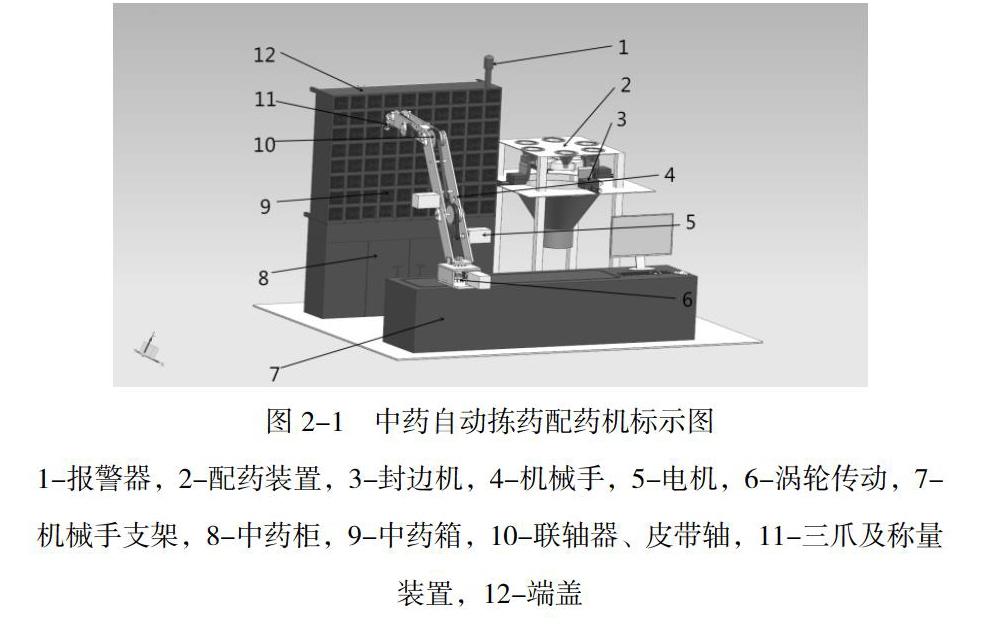
2.1 总体结构设计
中药自动拣药配药机包括设置有多个单元药盒的机柜、中央控制器、药箱推杆、机械手和出药机构;
所述中药自动拣药配药机的中央控制器包括计算机和与所述计算机相连的电气控制盒组成;
所述药箱推杆包括小型控制器和电动推杆以及吸铁石组成;
所述机械手是由操作机、控制器、伺服驱动系统和重量检测传感装置四部分组成,是一种模仿人手操作的机器;
2.2 机械手结构设计
2.2.1 机械手的组成
机械手是由执行机构,驱动机构和控制部分以及位置检测装置所组成。多关节型机械手结构简单紧凑,定位精度较高,占地面积小,它像人手一样有肘关节,可以实现多个自由度,动作比较灵活,可以完成全自动化的工作,并提高生产效率,因此本设计采用多关节型机械手。
2.2.2 机械手的驱动系统
驱动系统是驱动机械手执行运动机构的,决定了机械手整个系统的稳定运行状态。它是由动力装置、调节装置和辅助装置等组成。常用的驱动系统有液压驱动、气压驱动、电机驱动。随着低惯量比、直流伺服电机及配套的伺服驱动器的广泛采用,电机驱动被大量選用。根据三种驱动的特点,以及设计内容和需求,选用电机驱动实现手臂的伸缩运动。
在整个系统中电动机的选择是非常关键的,采用直流无刷电机作为中药自动拣药配药机机械手的驱动设备。
所以选用600w功率的电机作为中药自动拣药配药机机械手的最大输出功率。
根据计算分析,电动机的功率选择600w是最合适的,查表选择型号为92BL-6030H1-LK-B,额定电压为220V,转速为3000r/min,额定转矩为1.9N*m,将选用BL-2203C作为适配驱动器。
由直流无刷电机规格型号表查得适配驱动器为BL-2203C的电机相关数据。
通过以上的综合分析,最终选择92BL-6030H1-LK-B无刷电机型号是合理的,整个传动系统采用33的传动比,调速范围在1000r/min-8000r/min。
2.2.3 机械手减速器部位的设计
根据电机的选型分析,得知传送比是33。一级传动的情况下,直齿轮在3-6;圆锥齿轮在2-3;蜗轮蜗杆在5-70。由于考虑推杆空间的合理性,只能选择单级传速,这种情况下,只能选择蜗轮蜗杆进行减速。涡轮蜗杆的特点就是传动特别平稳,啮合声音小,而且传动比范围比较大,可以达到本次设计的理想的传动比。
本次设计选用蜗杆Z1为2,涡轮Z2为66,设计一组传动比。外壳采用的是防锈铝合金制造(3A21),此种铝合金具有很强的耐腐蚀性;蜗杆经淬火、低温回火处理的45钢硬度可以达到52HRC以上。蜗轮采用承载力较大的45#钢。
2.2.4 传动方式的选择
本次设计的中药自动拣药配药机选用了电机驱动的方式,在一定负载要求的场合下,如果采用直接驱动是比较困难的,那么就需要通过机械传动来作减速处理。本设计中的中药自动拣药配药机机械手上部分,为四个电机分别带动机械手运行,每个电机都需要减速系统,设计空间有限,不适合采用链传动,本文主要考虑使用带传动作减速系统。机械手下半部分采用蜗杆传动,因为蜗杆传动传动比大,传动平稳,冲击载荷小,所以选用蜗杆传动作为机械手下半部分的传动系统。
2.3 机械爪的设计分析
2.3.1 机械爪的重量检测系统与控制系统
我们在机械爪部分放置了抓取药物的重量检测与控制系统,能够实现与送料同步的自动计量。中药处方中每贴中药的重量的相对误差均控制在5%以内。机械爪传感器的选择,需在静动态条件下均可称量,所以我们选择电阻应变式称重传感器进行称重,其结构简单,线性和动态特性较好。调试简单,所以我们在本设计中选用电阻应变式称重传感器。
2.3.2 解决“藕断丝连”问题
由于中药材形状不一致、质量不均匀,因此需在机械手上安装传感器实现净重称量。x 轴与y 轴驱动系统的运动要求平稳、快速、冲击小,因此采用标准滑轨机构构成运动副。由于要求y轴运动定位误差控制在一定范围内,因此我们采用自适应型可编程控制器。这样的设计能减少中药材的“藕断丝连”现象。
3 控制系统的设计
3.1 可编程控制器的选择
考虑到机械手的通用性,同时使用点位控制,因此我们采用PLC对机械手的运动进行控制。当机械手的动作流程改变时,只需改变PLC程序即可实现,非常方便快捷。
可编程控制器分为整体式可编程控制器和模块式可编程控制器,一般在工艺过程比较固定、环境条件较好的场所,我们选用整体式可编程控制器;其他则选用模块式可编程控制器。
3.2 机械手的控制系统和位置检测系统
目前机械手的控制系统主要由程序控制和电气定位系统组成。中药自动拣药配药机械手采用的是PLC控制系统,它控制着机械手按规定的程序进行运动,并记忆人们给定的指令信息,反馈给控制系统当动作有错误或发生故障时即可发出报警信号,报警器发出响声。
机械手运行位置可通过控制系统随时将机械手的实时位置反馈给控制系统,并与设定的位置进行对比,当位置符合系统的正确位置,机械手将继续运行,当位置不符合系统的正确位置,将反馈给控制系统,发出报警信号。
3.3 机械手可编程控制器的工作流程
此机械手用中药箱体到漏斗之间的电动推杆取放中药。当按下启动按钮之后,有如下动作:按启动后,药箱后的电动推杆推动药箱,推开药箱, 2s后拣药机械手开始运动,抓取药品。通过重量检测器对药品进行抓取,抓取到合适重量,机械手开始平稳缓慢的升起,药箱后的电动推杆通过磁铁拉动药箱,关闭药箱,机械手上升到位触动行程开关后通过滑轨向右行驶,右转行驶到位后下降,下降到配药装置里,对于几副药进行均分,机械爪慢慢松开,把藥物分拣到各个包内,分拣完成,2s后机械手上升。上升到位后,机械手回到原来位置,循环上次运动过程,继续对下一个药品进行取放。
4 结论
本文参考了国内外现有的文献资料,对于目前的现状做了分析比较。应于目前对于中药拣药配药的技术还不是很成熟的情况下,通过对于目前中药颗粒拣药机,以及对中药配药机的研究,把两者的优势总结进行了整体模型的基本架构设计。本文的总体设计主要是对药品爪,抓取药品机械手进行了全面详细的计算,以及合理的设计,优化现有的模型,使得更好地提升工作效率。通过三维模型的设计,合理的节约了空间,别把机械手、电动机、丝杠、漏斗合理的安置于拣药配药机的合适位置,大大提升了空间的利用率。
参考文献
[1] 李彦明等.基于PLC控制的中药智能配药机[J].机电工程,2002,19(03):32-35
[2] 仝建刚等.新一代中药自动配药控制系统中关键技术的研究[J].制造业信息化,2001,23(10):33-35
[3] 陆鑫盛,周洪.气动自动化系统的优化设计[M].上海:上海科学技术文献出版社,2000.5.
[4] 王元根. 中药自动配药嵌入式系统设计与实现[D].北京交通大学,2018.
[5] 张玉宝. 中药自动配药软件管理系统的设计与实现[D].北京交通大学,2017.
[6]陈宝江等.一种短小丝条状物连续包装自动充填与计量机械手的研究[J]. 包装工程,2006,27(6).
作者简介:赵卫东,1997年出生,本科,机械设计制造及其自动化专业