自主化五模块储能低地板有轨电车制动系统设计
2020-06-29曾春军刘德学李杰张亮
曾春军 刘德学 李杰 张亮


摘要:介绍了我国首列采用混合储能供电的浮车型100%低地板有轨电车的制动系统整车要求、系统设计、主要功能和参数以及试验验证,通过试验数据表明该制动系统满足整车使用设计要求。
关键词:自主化;五模块;低地板有轨电车;制动系统
0 引言
中车株洲电力机车有限公司自主研发的五模块低地板有轨电车,突破了独立车轮轴桥装置集成及驱动技术,客室内无台阶、无斜坡,实现了整车100%低地板;采用了无需接触网的储能电源+蓄电池的电电混合技术,大幅提升了列车续航能力,实现了绿色节能;采用了包含电制动、液压制动和磁轨制动的多类型制动方式,保证了列车制动的高效和可靠。为保证整车行车安全,中车株洲电力机车有限公司还自主研发了制动系统地面1:1联调试验台,本文主要对制动系统的整车要求、系统设计、主要功能和参数以及试验验证进行介绍说明。
1 整车要求
列车为五模块编组,包含2个动力模块转向架、1个非动力转向架模块,编组形式为=Mc1+F1+Tp+F2+Mc2=。其中:=为连挂车钩;+为铰接、贯通道及车间减振器;Mc1、Mc2为设司机室带动力转向架支撑的动车模块;F1、F2为无转向架支撑,两端均为铰接支撑的悬浮模块;Tp为由非动力转向架支撑,车顶设受电器的拖车模块。编组图如图1所示。
与制动相关的主要总体技术参数如表1所示。
2 制动系统设计
制动系统设计基于整车平台的要求,采用微机控制方式实现液压力精确比例控制,同时具备与整车网络通信、防滑控制、故障诊断及数据储存等功能。
制动系统主要由电子制动控制单元(EBCU)、电液制动控制单元、液压制动夹钳装置、磁轨制动器及速度传感器等部件组成,其结构原理图如图2所示。
2.1 电子制动控制单元(EBCU)
EBCU负责接收和处理整车的制动控制指令,具备液压制动力控制、速度采集、防滑控制、故障诊断、系统自检、数据存储、网络通信等功能。
EBCU主要由电源板、控制板、输入/输出板、模拟板及PWM板等部件组成。
2.2 电液制动控制单元
电液制动控制单元一方面接收EBCU指令信号控制电机驱动油泵泵油给蓄能器,为液压系统提供稳定的液压油;另一方面接收EBCU控制指令和整车硬线控制指令(安全制动信号和停放制动信号),实现液压力精确控制。
电液制动控制单元主要由电机、油泵、液压阀、传感器及油箱等部件组成。根据控制功能不同,可分为用于Mc车的被动式电液制动控制单元和用于Tp车的主动式电液制动控制单元,原理图如图3和图4所示。
2.3 液压制动夹钳装置
液压制动夹钳装置主要负责接收电液制动控制单元输出的液压力实现制动和缓解功能,主要由液压制动夹钳、闸片及制动盘组成。分为被动式和主动式两种,被动式装用于动车转向架,主动式装用于拖车转向架。
动车转向架的每个轮上配一套被动式液压制动夹钳和制动盘,被动式液压制动夹钳采用浮动原理安装在齿轮箱体上(图5)。工作原理为弹簧蓄能,充油缓解,排油制动,将存储的弹簧能量根据不同的工况要求施加到制动盘上,从而产生制动作用;具有闸片间隙自动调整功能和手动缓解功能。
拖车转向架的每个轮上配一套主动式液压制动夹钳和制动盘(图6),固定安装在轴桥上,采用压力作用式,增压制动,减压缓解。采用隐藏式油路设计以节约安装空间。
2.4 磁轨制动器
磁轨制动器启动时由整車蓄电池提供电能,使其产生电磁力,制动靴吸附到轨道上摩擦产生制动力,在不受黏着条件限制下能有效缩短制动距离。
动车转向架装有一套带横杆结构的整体框架式磁轨制动装置,拖车转向架装有两套带弹簧悬挂的单体式磁轨制动装置。
3 制动系统功能及参数
制动系统主要接收硬线信号和网络信号指令,实现各制动功能的控制。整车制动力由列车控制单元(VCU)负责计算分配,采用电制动优先,不足部分通过网络信号发送给EBCU,由液压制动补偿的原则;为实现黏着分配等效原则,制动力不足部分优先由拖车转向架液压制动补偿。
制动系统制动功能分为常用制动、紧急制动、保持制动、安全制动、停放制动,系统设有防滑保护、冲动极限限制、撒砂及辅助缓解等功能。
3.1 常用制动
常用制动是通过操作司控器移至“制动”区实现,常用制动根据司控器的位置实现无级控制。常用制动施加过程中,可随时对其进行缓解操作。
正常情况下,常用制动完全采用电制动,具有冲动极限控制和防滑保护。当某一动车转向架上电制动失效时,将通过液压制动补偿,若制动力不满足要求,将依次由拖车转向架的液压制动和电制动力失效的转向架的液压制动进行补偿。
3.2 紧急制动
根据触发方式及产生制动减速度值不同,制动系统设计了两种紧急制动模式,具体如表2所示。
3.2.1 紧急制动1
紧急制动1制动减速度与最大常用制动减速度相同,触发后直至列车停车后才能被消除。因此,在制动系统设计时,制动力的施加方式及参数按照最大常用制动设计。
3.2.2 紧急制动2
紧急制动2由司机根据实际情况操作司控器移至“紧急”位实现。动车上的电制动、所有转向架上的液压制动及所有磁轨制动将同时施加,且撒砂功能也将自动投入。紧急制动2施加过程中,可随时对其进行缓解操作,无需等到列车停止。
3.3 保持制动
常用制动及紧急制动工况下,当列车速度低于0.5 km/h时,制动系统自动施加保持制动,保持制动力由液压制动提供,以防止溜车。直至收到保持制动缓解信号,保持制动缓解。
3.4 安全制动
安全制动由蘑菇按钮启动,安全制动环路断开。安全制动一旦触发,在列车完全停止前不能被缓解。该制动模式至少可以保障被动式液压制动夹钳弹簧制动力投入工作,同时磁轨制动也投入工作。
3.5 停放制动
停放制动时被动式液压制动夹钳弹簧制动力完全施加,以满足整车在6%的坡道安全停放的要求。停放制动力可通过液压充压和手动缓解装置进行缓解。
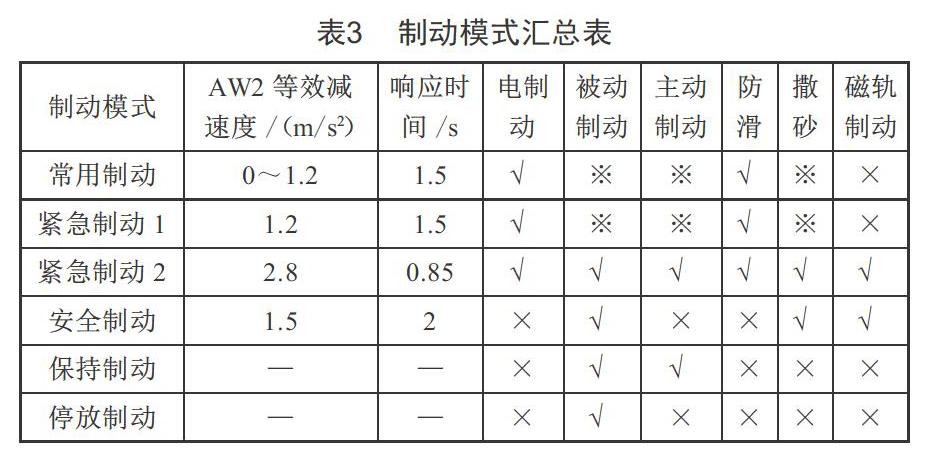
综上所述,各种制动工况触发方式及产生的制动效果有所不同,参与制动的制动设备也有所不同;保持制动和停放制动只要求制动系统输出相应的制动力,对响应时间无相关要求。制动模式汇总如表3所示。
4 制动系统试验验证
为满足整车设计要求,对制动系统进行了部件试验验证、地面1:1联调试验验证和线路动态试验验证,主要验证了制动系统控制功能实现以及制动力、响应时间、控制精度、耐久性等性能。
4.1 主要部件试验验证
为确保制动系统准确输出摩擦制动力,一方面对液压力控制精度及系统流量特性等技术指标进行试验验证;另一方面对液压制动夹钳装置摩擦副、压力—力输出特性进行试验验证。
4.1.1 EBCU和电液制动控制单元验证
对EBCU和电液制动控制单元组成的压力控制系统液压力采集精度、比例阀液压力闭环控制精度、油泵流量及液压阀流量特性进行了验证,同时对其电磁兼容、高低温及振动冲击性能进行了试验验证。
4.1.2 液压制动夹钳装置验证
(1)通过1:1制动动力试验台架对摩擦副各速度等级的制动工况的摩擦系数、磨耗量及热容量性能进行了验证。
(2)通过液压制动夹钳试验台对液压制动夹钳压力—力输出特性进行验证,主要验证确定液压制动夹钳的输出力、传动效率、迟滞特性和疲劳耐久等各项技术指标满足设计要求。
4.2 地面1:1联调试验验证
建立地面1:1联调试验试验台,根据整车要求模拟输出司控器级位、电制动能力、速度等信号给制动系统;进行制动功能静态测试,对系统响应时间、模拟故障导向、防滑功能及检测系统性能等进行试驗验证。
4.3 制动系统线路动态试验验证
通过各工况速度等级的线路动态试验验证,制动系统制动功能、制动减速度及制动距离均满足设计要求。现以AW3载荷工况、70 km/h速度等级紧急制动2试验数据进行说明,详细制动过程参数如表4所示,紧急制动过程如图7所示。
5 结语
制动系统是确保低地板有轨电车行车安全最关键的系统,其设计过程需经过充分的验证确认。因无载荷测量装置,相同制动级位下制动力不会随载荷的变化而变化,导致低载荷的制动减速度大于高载荷的,后续应设计载荷测量装置,以实现不同载荷工况的制动同减速度控制。地面试验验证及整车线路试验验证表明,自主化五模块储能低地板有轨电车制动系统设计满足整车要求,其设计思路和验证方法可为后续制动系统设计提供一定的参考。
[参考文献]
[1] 陈勇,尚江傲,李达.自主化五模块储能式低地板有轨电车设计[J].电力机车与城轨车辆,2018,41(3):5-9.
[2] 杨永勤,许红梅,张瑞玲,等.自主研发的100%低地板现代有轨电车制动系统[J].城市轨道交通研究,2014,17(12):90-93.
收稿日期:2020-03-09
作者简介:曾春军(1987—),男,湖南永州人,工程师,从事轨道交通制动系统研发工作。
