基于分段自适应算法的浅海水深遥感反演融合模型研究
2020-06-27张雪纯张靖宇
张雪纯, 马 毅, 张靖宇, 程 洁, 3
基于分段自适应算法的浅海水深遥感反演融合模型研究
张雪纯1, 2, 马 毅1, 2, 张靖宇2, 程 洁2, 3
(1. 内蒙古师范大学, 内蒙古 呼和浩特 010010; 2. 自然资源部 第一海洋研究所, 山东 青岛 266061; 3. 山东科技大学, 山东 青岛 266590)
对于水深光学遥感反演研究, 虽然已经建立了大量的模型方法, 然而对于不同水深段, 同一模型的反演精度各异, 且采用单一模型进行水深反演得到的整体反演精度未必最佳。为了提高水深光学遥感反演的整体精度, 本文提出一种分段自适应水深反演融合模型, 模型在误差估计的基础上, 结合了对数线性模型、对数转换比值模型、改进的对数转换比值模型与多调节因子模型的优势。利用模型在西沙群岛东岛开展了水深遥感反演实验, 从整体反演精度、不同水深段反演精度及逐米水深精度等角度进行分析, 结果表明, 分段自适应融合模型的整体精度最高, 平均绝对误差为1.09 m, 平均相对误差达到16.06%; 分水深段来看, 分段自适应融合模型在多数不同水深段内的反演效果均最好; 从逐米精度来看, 分段自适应融合模型在大部分逐米水深段的反演能力均优于其他模型。
水深光学反演; 分段自适应; 对数模型
水深是了解海洋环境的一个关键参数, 对海岸研究和海洋工程建设非常重要, 也为海上运输和航行提供重要信息。由于传统的船载水深测量方法存在不足之处, 对于船只无法到达的复杂区域不能适用, 且成本较高、耗时耗力。遥感水深探测因其覆盖范围广、更新时间快、成本低的优势, 逐渐成为一种弥补传统船载测深的方法。
水深光学遥感技术自20世纪60年代开始受到关注, 随着一系列地球观测卫星的升空, 遥感平台的多样化和可用遥感数据的富足极大的推进了光学水深遥感的发展, 水深遥感领域出现大量的水深遥感反演模型[1-2]。理论解析模型因在构建过程中所需的水体光学参数多, 故其应用受到限制[3], 统计模型利用统计学方法直接建立实测水深值与遥感图像辐亮度值之间的相关关系, 基本没有考虑水深遥感的物理机制[4]。半理论半经验模型是理论模型与经验算法的结合, 其中对数线性模型和对数转换比值模型应用相对广泛, Benny等[5]根据水体光反射衰减特性提出单波段水深反演模型, Lyzenga等[6]在此基础上发展了双波段对数线性模型, 并将该模型推广应用到多个波段[7-8]。Stumpf等[9]在线性反演模型基础上提出了对数转换比值模型, 避免了对数线性模型中光学遥感器接收到的辐亮度与深水区辐亮度差值为负的情况。Su等[10]利用对数转换比值水深反演模型对摩洛凯岛进行了水深反演实验, 结果表明该方法能大大提高反演效率, 且比值模型对于深水区的反演更具优势。Drakopoulou等[11]利用线性模型与比值模型对希腊克里特岛进行水深估计, 实验结果表明两种模型在不同底质水域的反演效果不同。近年来, 许多学者对传统的对数转换比值模型进行了改进, 田震[12]提出将传统对数转换比值模型中分子分母的相同参数改变为相异的调节因子, 可以减少模型反演过程中自身的束缚, 改善反演结果, 并应用改进的对数转换比值模型开展了珊瑚岛礁周边海域水深反演, 结果表明水深反演效果较传统模型有提升。水深探测精度受环境影响较大, 对于近岸极浅水域(<5 m), 叶绿素和悬浮物浓度相对较高且底质复杂, 相对误差常大于50%, 水深反演精度难以提升, 陈安娜[13]提出一种多调节因子的对数转换比值模型, 在传统模型的基础上增加了表征水中浮游植物细胞、无机颗粒物、底质等干扰因素的可调因子, 并对不同浊度的水体进行了水深反演实验, 结果表明新模型在0~5 m浅水深段反演精度有明显提高。
由于不同模型在不同水深段内的反演能力不同, 模型精度存在差异, 且采用单一模型进行水深反演得到的整体反演精度未必最佳。因此, 为进一步提高水深遥感反演的整体精度, 本文结合对数线性模型、Stumpf对数转换比值模型、改进的对数转换比值模型与多调节因子模型, 提出一种水深遥感分段自适应融合模型, 利用WorldView-2影像对东岛进行了水深反演实验, 分别从模型整体反演精度、不同水深段反演精度、不同水深分段方式与逐米水深反演精度几个角度对比了不同模型的反演结果。
1 数据与方法
1.1 研究区与数据
本文的研究区域为中国西沙群岛的东岛周边海域, 东岛在永兴岛东南约50 km, 面积约为1.7 km2, 是西沙群岛中的第二大岛, 位于北纬16°39′—16°41′、东经112°43′—112°45′之间。岛呈长方形, 长约2.4 km、宽约1 km, 平均海拔4~5 m, 是上升礁和珊瑚贝壳沙体复合组成的岛屿, 周围有沙堤环绕, 岛中部地势低洼。属于热带海洋气候, 终年高温多雨, 是中国水热条件最优越的地区之一。
数据采用WorldView-2影像, 见图1。影像包含四个多光谱波段, 分别为蓝波段(450~510 nm)、绿波段(510~580 nm)、红波段(630~690 nm)和近红外波段(770~895 nm), 分辨率2 m, 成像日期为2012年9月20日。在863项目的支持下, 实测水深数据在2011年通过单波束测深仪测量获得, 并已校正到理论深度基准面, 本文实验范围为0~20 m水深区。

图1 研究区遥感影像与水深点分布
1.2 数据预处理
1.2.1 辐射定标
将影像上无量纲的灰度值(DN值)转换为具有实际意义的辐亮度值的过程称为辐射定标, 对于WorldView-2影像, 转换公式如下:

式中,()为第波段的辐亮度值, 单位为W/(m2·sr·μm); absCalFactor为第波段的绝对定标系数; DN为第波段图像像元灰度值; Δ为第波段的等效波段宽度。
1.2.2 大气校正
大气的衰减作用对不同波长的光是有选择性的, 因而大气对不同波段影像的影响是不同的, 大气校正可以去除大气散射、气溶胶等的影响, 尽可能还原地表真实反射率。本文采用ENVI中的FLAASH模块对影像进行大气校正。
1.2.3 潮汐校正
采集水深实测数据的时间与获取遥感影像的时间并不相同, 若不经过处理直接利用实测水深数据参与计算会导致误差的产生, 为使水深反演的结果更精确, 需要对水深实测数据进行潮汐校正。潮汐校正是将实测水深数据校正为影像获取时刻的瞬时水深, 某时刻的水深等于实测水深加上该时刻的潮高, 经查询潮汐表得到影像获取时潮高为0.81 m。
1.3 模型方法
1.3.1 不同波段光谱与水深关系
定理4 内幂零群G=PQ,其中P为正规Sylow p-子群,Q为循环Sylow q-子群(见引理7),则其幂图P(G)可平面化当且仅当G为以下情形之一:
为探究WorldView-2影像不同波段光谱与水深间的关系, 绘制控制点的四个多光谱波段光谱值与水深值的散点图, 见图2。从图中发现蓝波段与绿波段的光谱值随水深值的增加而减小, 水深值增加至15 m以上时, 蓝、绿波段的光谱值趋于平稳。红波段的光谱值在水深范围0~5 m时随水深的增加而减小, 水深增加至5 m以上时, 红波段的光谱值趋于平稳。而近红外波段的光谱值与水深值关系不明显, 光谱值在不同水深范围内大致相同, 呈平稳趋势。根据以上分析, 蓝、绿、红波段的光谱值与水深值间关系相较近红外波段明显, 不同模型中采用不同波段光谱值参与计算, 详细见1.3.2—1.3.5节。
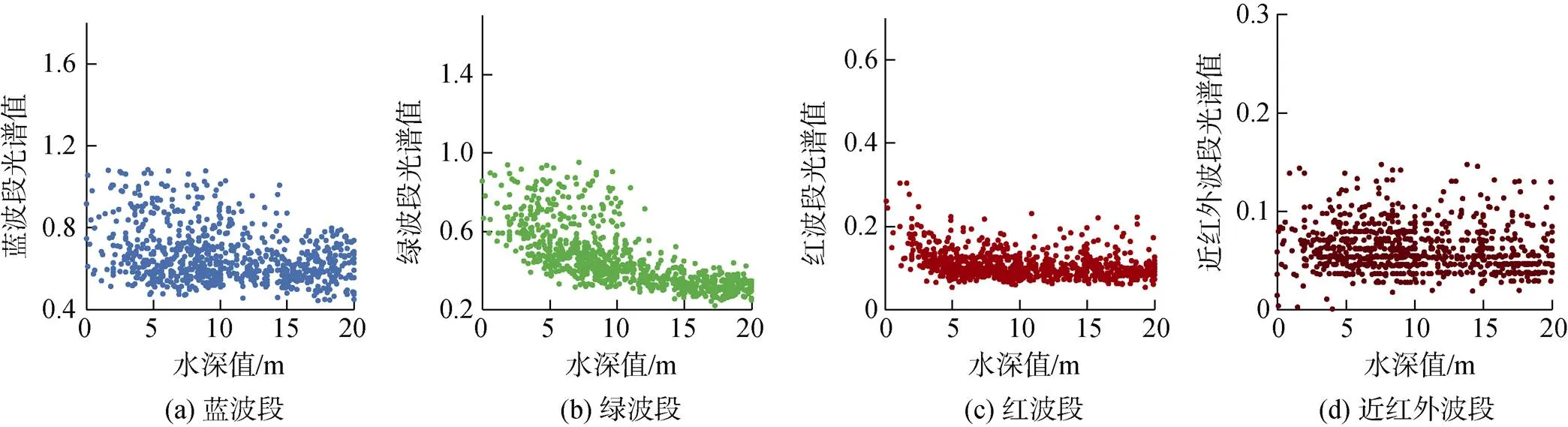
图2 不同波段光谱值与水深值散点图
1.3.2 水深遥感分段自适应融合模型
由于不同模型在不同水深段内的反演精度存在差异, 为提高模型的整体反演精度, 本文提出一种水深遥感分段自适应融合模型。模型根据稀疏的实测水深点或小比例尺海图将20 m内的浅海水深进行分段, 计算不同模型反演得到的平均绝对误差与平均相对误差, 选取每个水深段内的最优精度的函数。
定义水深函数

其中1为对数线性模型,2为Stumpf对数转换比值模型,3为改进的对数转换比值模型,4为多调节因子模型, 详细见1.3.3—1.3.5节。


其中MAE为水深反演的平均绝对误差(Mean Absolute Error), MRE为平均相对误差(Mean Relative Error), 表达式如下:



即初始划分水深段在0~10 m范围内, 按水深反演的平均绝对误差最小选取最优精度函数; 水深段在10~20 m范围内, 按水深反演的平均相对误差最小选取最优精度函数。
多波段对数线性公式如下:


1.3.4 对数转换比值模型与改进的转换比值模型
为避免对数线性模型中光学遥感器接收到的辐亮度与深水区辐亮度差值为负的情形, Stumpf等提出了对数转换比值模型:

式中,0,1,为回归系数;R()与R()为相应波段和的反射率, 实验中选取蓝、绿波段进行计算。
改进的对数转换比值模型将每个波段的对数调节因子调整为2个, 将传统对数转换比值模型中相同的调节因子改为相异的因子, 可以减少模型反演中自身的束缚, 改善反演结果, 公式如下:

式中,0,,,1为回归系数;R()与R()为相应波段和的反射率, 实验中选取蓝、绿波段进行计算。
1.3.5 多调节因子模型
由于传感器记录的辐射值不仅包括底部水深, 还有叶绿素浓度或悬浮物等因素造成的衰减, 近岸极浅水域(<5 m)中叶绿素和悬浮物浓度相对较高、底质复杂, 水深反演精度难以提升, 多调节因子模型可以很好地解决此类问题, 在对数转换比值模型的基础上增加了水中浮游植物细胞、无机颗粒物、底质等干扰因素的可调因子, 具体公式如下:

式中,0,,,,,1为回归系数;R()与R()为相应波段和的反射率, 实验中选取蓝、绿波段进行计算。
1.3.6 模型建立
实验中选取空间分布均匀的控制点与检查点, 个数分别为843与845, 其分布如图1所示。对数线性模型、对数转换比值模型、改进的对数转换比值模型与多调节因子模型利用控制点的水深值与水深点辐亮度值或反射率之间的关系, 建立水深反演模型。检查点则用来对水深模型进行精度评价。不同水深段的控制点与检查点数量如表1所示。

表1 不同水深段水深点数量
2 结果与分析
2.1 水深反演结果
对数线性模型、对数转换比值模型、改进的对数转换比值模型与多调节因子模型的参数见表2, 水深遥感分段自适应融合模型根据控制点不同水深段内精度不同, 选取最优精度函数, 实验得出控制点在0~5 m, 5~10 m, 10~15 m, 15~20 m水深段内的最优精度函数分别为多调节因子模型, 多调节因子模型, 对数线性模型, 对数线性模型。即在实测水深范围为0~10 m时采用多调节因子模型; 10~20 m范围内选取对数线性模型。本文得出的分段自适应融合模型见下式:
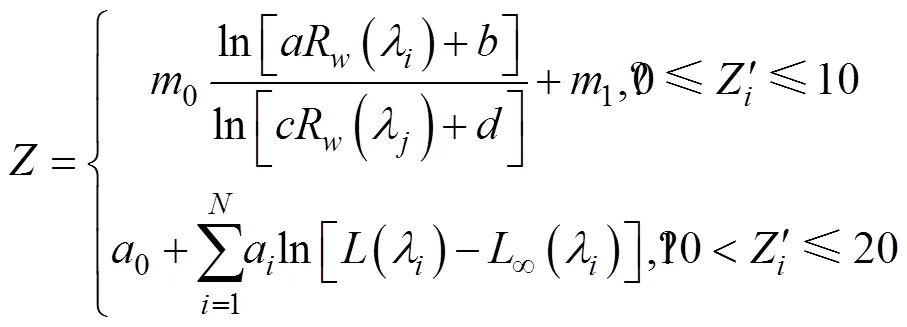

表2 模型参数表
对数线性模型、对数转换比值模型、改进的对数转换比值模型、多调节因子模型与分段自适应融合模型的水深反演结果如图3所示, 其中分段自适应融合模型[图3(e)]的水深反演结果图是依据实测水深控制点划分水深范围后再将不同模型拼接而成, 控制点划分的水深范围见图3(f)。利用实测水深点构建的水深DEM见图3(g)。根据图3中显示的不同模型水深反演结果, 可以发现从沿岸到开阔水域所有模型的反演结果大致相同, 均符合实测水深点构建的水深DEM与控制点划分的水深分区范围。岛礁盘上水深范围大致为0~5m, 东北方向分布范围较西南方向分布范围更大; 水深范围5~10 m大致分布于距岛0.5~2 km的西北侧与东南侧; 而10~20 m水深范围较小, 在图中右下角水深较深, 大致为18~20 m。注意到岛的西南位置有一处港池, 对数转换比值模型、改进的对数转换比值模型、多调节因子模型与分段自适应融合模型对此处的反演效果均较好, 但对数线性模型[图3(a)]低估港池水深, 该模型在0~5 m水深处的反演效果与其余几种模型有明显差异, 且在最外围西北方向至东北方向水深10~20 m处, 对数线性模型的水深反演结果与对数转换比值模型、改进的对数转换比值模型和多调节因子模型相比较更深。

图3 不同模型水深反演结果图
2.2 模型整体反演精度比较
绘制检查点在不同模型得出的水深反演值与水深实测值的散点图, 见图4。水深反演值与水深实测值散点图直观地显示出每个检查点的水深反演值与水深实测值的偏离情况, 点越接近图中的1︰1直线说明偏离程度越小, 水深反演值也就越接近实测值, 反之, 点距离直线越远偏离程度越大。整体来看, 分段自适应融合模型的反演效果最好, 在每个水深段内的检查点都接近于1︰1直线, 偏离程度较其他几种模型最小。对数线性模型的偏离程度相对较小, 10~20 m水深段内反演效果优于其余模型, 但在0~5 m水深段内多数点偏离1︰1直线, 与上节中水深反演结果图的分析一致。对数转换比值模型、改进的对数转换比值模型与多调节因子模型的偏离程度相近, 在0~10 m水深段内, 三种模型的反演效果较好, 特别是多调节因子模型, 检查点均接近于图中的1︰1直线; 但在10~20 m的水深段内, 三种模型的部分点水深值被低估, 散点的偏离程度大于对数线性模型。水深反演值与水深实测值的散点图显示, 对于水深中等至较深区域(10~20 m), 所有模型的反演效果均有下降, 尤其是15~20 m水深段, 散点的偏离程度相对较大。

图4 不同模型水深反演值与水深实测值散点图
分别计算不同模型的平均绝对误差与平均相对误差, 见表3。通过对五种不同模型的精度评价, 发现整体反演效果最好的是分段自适应融合模型, 平均绝对误差(MAE)为1.09 m, 与对数线性模型相比降低0.15 m, 平均相对误差(MRE)为16.06%, 较对数线性模型降低4.75%。其次是多调节因子模型, MAE为1.21 m, MRE为17.68%。第三是改进的对数转换比值模型, MAE为1.22 m, MRE为18.44%, 改进的对数转换比值模型与多调节因子模型的整体水深反演精度接近, 平均绝对误差相差0.01 m, 平均相对误差相差0.76%, 均优于传统的对数线性模型与对数转换比值模型。

表3 不同模型的平均绝对误差与平均相对误差
2.3 水深段精度分析
通过对水深反演值与水深实测值散点图的分析, 发现不同模型在不同水深段内的精度有所不同, 为分析不同深度下模型的反演效果, 将水深实测数据分为四个不同的水深段, 分别为0~5 m、5~10 m、10~15 m和15~20 m, 并计算各自的平均绝对误差与平均相对误差, 见表4与图5。表4显示在0~5 m水深段内, 分段自适应融合模型的精度最好, 平均绝对误差为0.79 m, 比对数线性模型降低0.42 m; 平均相对误差为39.52%, 低于对数线性模型约19个百分点。在5~10 m水深段内, 分段自适应融合模型的精度依然最佳, 平均绝对误差为0.98 m, 比对数线性模型降低0.19 m; 平均相对误差为12.37%, 低于对数线性模型3个百分点。但在10~15 m水深段内, 对数线性模型的精度最好, MAE为1.12 m, MRE为9.03%, 分段自适应融合模型与对数线性模型精度接近, 平均绝对误差与平均相对误差分别相差0.04 m与0.43%。在15~20 m水深段内, 分段自适应融合模型的反演精度与对数线性模型一致, 平均绝对误差分别为1.51 m, 平均相对误差为8.49%。从图5中可以看出, 随着水深值的增加, 几种模型的平均绝对误差呈上升趋势, 但平均相对误差均有下降, 分段自适应融合模型在四个水深段内的精度大部分为最优或接近最优。

表4 不同模型分水深段精度评价

图5 不同模型分水深段精度评价图
2.4 不同水深分段方式精度比较
上节中根据四个水深段0~5 m、5~10 m、10~15 m、15~20 m分别对不同模型进行精度分析, 现对0~20 m水深范围用不同的方式进行分段。表5为不同模型在0~10 m、0~15 m、5~15 m、5~20 m与10~20 m的平均绝对误差与平均相对误差。由表5可知, 在0~ 10 m、0~15 m、5~15 m与5~20 m水深段内, 本文提出的分段自适应融合模型反演能力均最强, 精度最优, 在10~20 m水深段内, 分段自适应融合模型与精度最好的对数线性模型误差接近, 平均绝对误差仅相差0.02 m, 平均相对误差0.22%。在0~10 m水深段内, 分段自适应融合模型MAE为0.93 m, MRE为22.65%, 较对数线性模型降低约9个百分点; 在0~15 m水深段内, 分段自适应融合模型的MAE为0.98 m, 分别比对数线性模型与对数转换比值模型降低0.19 m、0.11 m, 平均相对误差为18.76%, 较对数线性模型与对数转换比值模型降低6.05%、3%; 在5~15 m、5~20 m水深段内, 分段自适应融合模型的MAE分别为1.04 m、1.16 m, MRE分别为11.29%、10.55%; 综合这五个不同的水深段来看, 分段自适应融合模型的反演能力强, 在不同水深情况下反演精度较好。

表5 不同水深分段方式精度评价
2.5 逐米水深精度分析
为了进一步分析不同模型在不同水深段的反演效果, 分别计算逐米水深的平均绝对误差与平均相对误差, 并绘制折线图, 见图6。水深为0~9 m、11~12 m范围时, 10个逐米水深段内分段自适应融合模型反演效果最好, 平均绝对误差与平均相对误差均最低。在水深9~11 m两个逐米水深段内, 分段自适应融合模型的反演精度次于多调节因子模型与改进的对数转换比值模型。在12~13 m水深范围内, 对数线性模型的精度最好, 平均绝对误差与平均相对误差最低, 分段自适应融合模型与对数线性模型误差接近。水深为13~18 m这5个逐米水深段内时, 分段自适应融合模型的反演精度与对数线性模型一致, 平均绝对误差与平均相对误差均最低。18~20 m时, 改进的对数转换比值模型反演精度优于其他模型。
根据逐米水深段的精度分析结果可知, 分段自适应融合模型稳定性较高, 在大多数逐米水深段内的反演能力较强, 精度均最佳, 仅在少部分逐米水深段(9~11 m、12~13 m、18~20 m), 模型的反演精度略逊于其他模型。

3 结论与讨论
本文利用WorldView-2卫星4波段影像, 采用本文提出的水深遥感分段自适应融合模型, 与传统的对数线性模型、Stumpf对数转换比值模型, 和近年来提出的改进的对数转换比值模型与多调节因子模型, 以东岛为例分别开展了水深反演实验, 并从不同角度对这几种模型进行精度对比分析。结果表明:
1) 从整体上看, 分段自适应融合模型的反演能力最强, 水深反演值与水深实测值散点图的散点偏离程度最小; 且分段自适应融合模型的反演精度最佳,平均绝对误差为1.09 m, 平均相对误差为16.06%, 均低于其余模型。
2) 以5 m为间隔分水深段来看, 在0~5 m、5~ 10 m、与15~20 m水深段内分段自适应融合模型的反演精度均最好, 平均绝对误差与平均相对误差最低。在10~15 m水深段内, 分段自适应融合模型的误差也与精度最好的对数线性模型接近。按不同水深分段方式来看, 分段自适应融合模型在大部分水深段的反演精度依然最高, 表明以5 m为间隔取最优精度函数的模型设置较为合理, 同样也说明分段自适应融合模型适用于地形起伏较小、水深变化均匀海域的浅海水深反演研究。
3) 根据逐米水深精度比较结果, 分段自适应融合模型在绝大多数逐米水深范围内的反演能力较强, 但在少部分水深范围内(9~11 m、12~13 m、18~20 m), 分段自适应融合模型的反演精度略逊于其他模型。
分段自适应融合模型利用实测数据的水深分布, 以5 m为水深间隔进行分段, 进而选取最优精度函数。所以, 对于水深数据较少或稀疏分布的研究区域, 该模型的使用范围受到限制, 在今后的研究中还需对模型进行完善, 使模型的反演精度更佳, 应用范围更广泛。
[1] 赵洪臣. 基于WorldView-2的多级决策的光学遥感水深反演方法研究[D]. 南京: 南京大学, 2017. Zhao Hongchen. Water depth inversion method of optical remote sensing using multilevel decision-making scheme based on WorldView-2 image[D]. Nanjing: Nanjing University, 2017.
[2] 马毅, 张杰, 张靖宇, 等. 浅海水深光学遥感进展[J]. 海洋科学进展, 2018, 36(3): 331-351. Ma Yi, Zhang Jie, Zhang Jingyu, et al. Progress in shallow water depth mapping from optical remote sensing[J]. Advances in Marine Science, 2018, 36(3): 331-351.
[3] Figueiredo I N, Pinto L, Goncalves G. A modified Lyzenga’s model for multispectral bathymetry using Tikhonov regularization[J]. IEEE Geoscience and Remote sensing Letters, 2016, 13(1): 53-57.
[4] 李丽. 基于WorldView-2数据的西沙群岛遥感水深反演——以赵述岛和南岛为例[J]. 国土资源遥感, 2016, 28(4): 170-175. Li Li. Remote sensing bathymetric inversion for the Xisha Islands based on WorldView-2 data: A case study of Zhaoshu Island and South Island[J]. Remote Sensing for Land and Resources, 2016, 28(4): 170-175.
[5] Benny A H, Dawson G J. Satellite imagery as an aid to bathymetric charting in the Red Sea[J]. The Cartographic Journal, 1983, 20(1): 5-16.
[6] Lyzenga D R. Passive remote sensing techniques for mapping water depth and bottom features[J]. Applied Optics, 1978, 17(3): 379-383.
[7] Papedes J M, Spero R E. Water depth mapping from passive remote sensing data under a generalized ratio assumption[J]. Applied Optics, 1983, 22: 1134-1135.
[8] Lyzenga D R, Malinas N P, Tanis F J. Multispectral bathymetry using a simple physically based algorithm[J]. IEEE Transactions on Geoscience & Remote Sensing, 2006, 44(8): 2251-2259.
[9] Stumpf R P, Holderied K, Sinclair M. Determination of water depth with high-resolution satellite imagery over variable bottom types[J]. Limnology and Oceanography, 2003, 48(1): 547-556.
[10] Su H, Liu H, Heyman W D. Automated derivation of bathymetric information from multi-spectral satellite imagery using a non-linear inversion model[J]. Marine Geodesy, 2008, 31(4): 281-298.
[11] Drakopoulou P, Kapsimalis V, Parcharidis I, et al. Retrieval of nearshore bathymetry in the Gulf of Chania, NW Crete, Greece, from WorldView-2 multispectral imagery[C]//Sixth International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2018). International Society for Optics and Photonics, 2018, 10773: 107730W.
[12] 田震. 浅海水深多/高光谱遥感模型与水深地形图制作技术研究[D]. 青岛: 山东科技大学, 2015. Tian Zhen. Study of bathymetry inversion models using multispectral or hyperspectral data and bathyorographical mapping technology[D]. Qingdao: Shandong University of Science and Technology, 2015.
[13] 陈安娜. 适用于复杂环境的水深光学遥感新模型研究[D]. 青岛: 自然资源部第一海洋研究所, 2019. Chen Anna. Research on novel model of optical remote sensing bathymetry for complex situations[D]. Qingdao: First Institute of Oceanography, Ministry of Natural Resources, 2019.
[14] Chen B, Yang Y, Xu D, et al. A dual band algorithm for shallow water depth retrieval from high spatial resolution imagery with no ground truth[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 151: 1-13.
Research on the remote sensing inversion fusion model of shallow water depth based on the piecewise adaptive algorithm
ZHANG Xue-chun1, 2, MA Yi1, 2 *, ZHANG Jing-yu2, CHENG Jie2, 3
(1. Inner Mongolia Normal University, Hohhot 010010, China; 2. First Institute of Oceanography, Ministry of Natural Resources, Qingdao 266061, China; 3. Shandong University of Science and Technology, Qingdao 266590, China)
Although numerous models and methods have been established for water depth inversion by optical remote sensing, the accuracy of the same model is different for different water depths. Moreover, the overall inversion accuracy obtained by using a single model for depth inversion may not be the best. To improve the overall accuracy of bathymetric optical remote sensing inversion, a piecewise adaptive depth inversion fusion model is proposed. On the basis of error estimation, the model combines the advantages of the log linear, log conversion ratio, improved log conversion ratio, and multiple adjustment factor models. The proposed model is used to conduct remote sensing inversion experiments of water depth in the eastern part of Xisha Islands. From the perspectives of the overall inversion accuracy, inversion accuracy of different water depth sections, and per meter water depth accuracy, results show that the overall accuracy of the proposed model is the highest, with the mean absolute error of 1.09m and the mean relative error of 16.06%. In addition, the inversion results of the adaptive fusion model in most of the water depth sections are the best. In terms of the per meter water depth accuracy, the inversion capability of the piecewise adaptive fusion model in most water depth sections is better than that of other models.
water depth optical inversion; piecewise adaptation; logarithmic model
Nov. 19, 2019
TP79
A
1000-3096(2020)06-0001-11
10.11759/hykx20191119003
2019-11-19;
2020-02-26
国家自然科学基金重点项目(51839002)
[the Key Project of Natural Science Foundation, China under Grant, No. 51839002]
张雪纯(1995-), 女, 内蒙古包头人, 硕士研究生, 主要从事海洋遥感与应用研究, E-mail: zxc_apparate@163.com; 马毅(1973-), 男,通信作者, 研究员, 主要从事海岛海岸带遥感与应用研究, E-mail: mayimail@fio.org.cn
(本文编辑: 康亦兼)