基于经济控制器模式的耙吸挖泥船疏浚性能分析
2020-06-23周丙浩朱时茂郑金龙
周丙浩,焦 鹏,朱时茂,郑金龙
(中港疏浚有限公司,上海 200136)
21世纪初以来,市场需求快速变化,随着疏浚工程规模与疏浚船舶的大型化发展,对施工质量的要求越来越高[1],人员配置大幅增加,随之产生的成本也逐渐增加[2]。为在减少人工成本和提高疏浚效率的同时降低能耗,高度智能的自动疏浚船舶是目前发展的趋势。根据IHC的 INSIGHT报告(2018),2006年,比利时德米集团于“MARIEKE”耙吸挖泥船开始基于ECO(经济控制器)模式的实船试验;2014年,印度疏浚公司在3艘中型姊妹船上进行了全面测试[3-4]。
国内方面,中港疏浚有限公司于2019年首次建造两艘具有“一人疏浚”模式的智能船舶——“航浚6008”轮和“航浚6009”轮(图1)。针对“一人疏浚”模式下的疏浚效果,2019年6月,在“航浚6008”轮进行了MANUAL模式(手动)与ECO模式(自动)下的性能对比试验。
本文通过海上试验,对ECO模式下耙吸挖泥船的疏浚性能进行分析。基于装舱时间、产量、能耗、真空、流速和密度等试验数据,分析TSC(航速控制)、EPC(泥泵控制)、AVC(耙头活动罩自动控制)等ECO模式作用下的挖泥船疏浚性能,并与MANUAL模式下的性能进行对比分析,以达到提高疏浚效率和产量、节本、降耗的目的。

图1 “航浚6009”轮
1 ECO工作原理
高自动化的耙吸挖泥船疏浚控制系统主要由12个支系统组成,分别为:EPC、AGVC(环保溢流阀自动控制)、PCS(推进控制系统)、ADC(吃水自动控制系统)、ALMO(低浓度自动旁通系统)、OLE(溢流损失评估)、DLM(吃水和装载测量系统)、TSC、AVC、ADWC/AWC(绞车自动控制系统)、APSS(耙臂顺序自动控制)、DTPS(疏浚轨迹显示系统),如图2所示(其中DCS为疏浚控制系统,Eco-APC即EPC,DGPS为差分全球定位系统,PRC为产量计算,TDSS为干土质量,STPM为耙臂位置测量系统,Echo Sounding为测深仪,Gyro Compass为电罗经,Beidou为北斗卫星导航系统,ECDIS为电子海图显示与信息系统,Tidal为潮汐数据系统)。ECO主要包括3个控制器:TSC、EPC和AVC。随着疏浚过程中土壤性质、挖掘深度、船舶吃水等条件的变化,人工智能系统通过调整TSC、EPC和AVC的设定优化疏浚作业,以保持整个疏浚周期的最大生产效率。
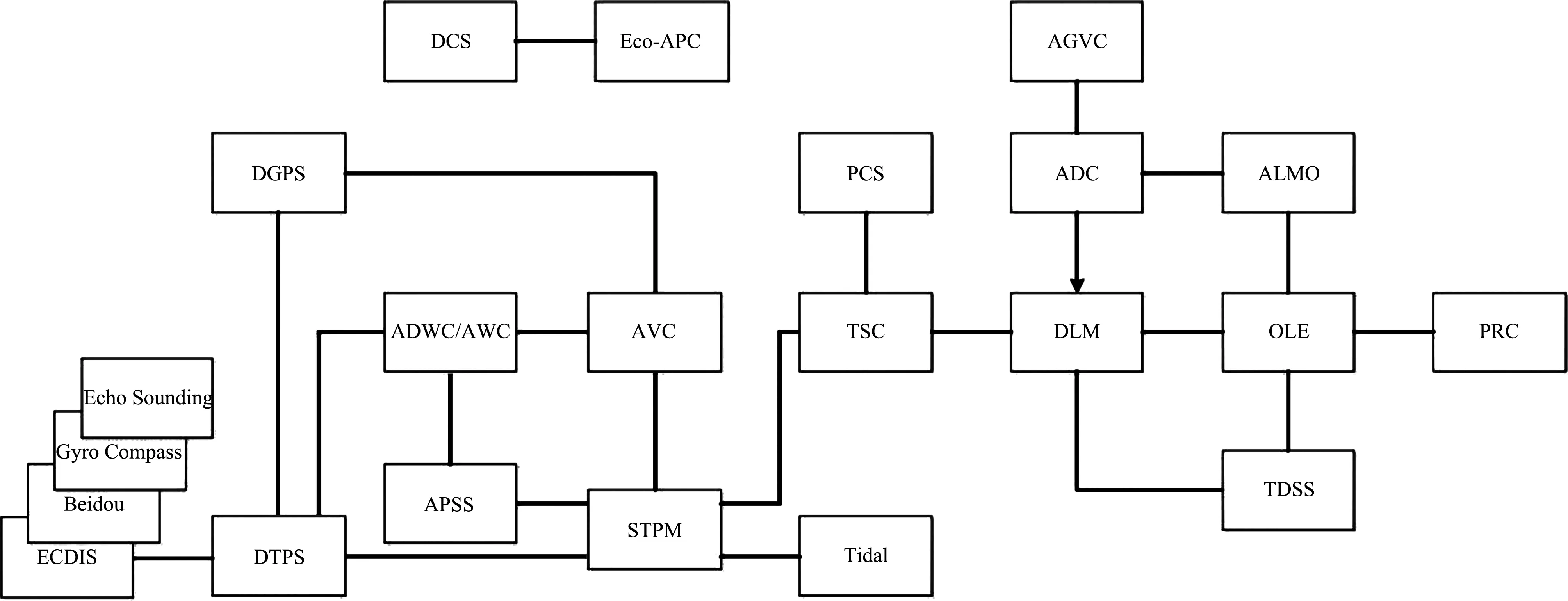
图2 疏浚控制系统
船舶对地速度是疏浚作业的一个重要参数。疏浚过程中,在航行速度受到耙头阻力等各种因素影响时,TSC通过向推进系统发出模拟信号,不断调整推进器桨角,自动补偿耙头拖曳力,以保持疏浚作业期间航速的稳定。
ECO根据泥泵特性、测量值和水力计算模型,估算理论扬程和效率,并与实际测量扬程和效率进行比较。在小流速范围内,扬程和效率测量值急剧下降,即汽蚀开始时,ECO向泥泵驱动装置发送所计算出的减速信号。控制算法动态地在降低流量和提高密度间寻找最佳平衡,以保持最高产量。
AVC根据船舶施工中的不同疏浚工况(如土壤、挖掘深度和船舶吃水)的变化及泥泵特性计算出最佳流速,通过调节活动罩位置将流速稳定在最佳流速附近,以稳定最大产量,且最大限度地减少了外部干扰(如河床底部不规则)的影响,使疏浚过程更稳定。
AVC与EPC相互配合,当实际泥浆流速高于(最佳)设定值时,AVC将活动罩下压,使耙头产量与泥泵真空极限相匹配;达到极限时,EPC通过降低泥泵转速来降低泥浆流速,以达到最佳混合物流速。通过这种机制,AVC和EPC配合寻找最佳产量点。TSC、EPC和AVC显示界面如图3所示。


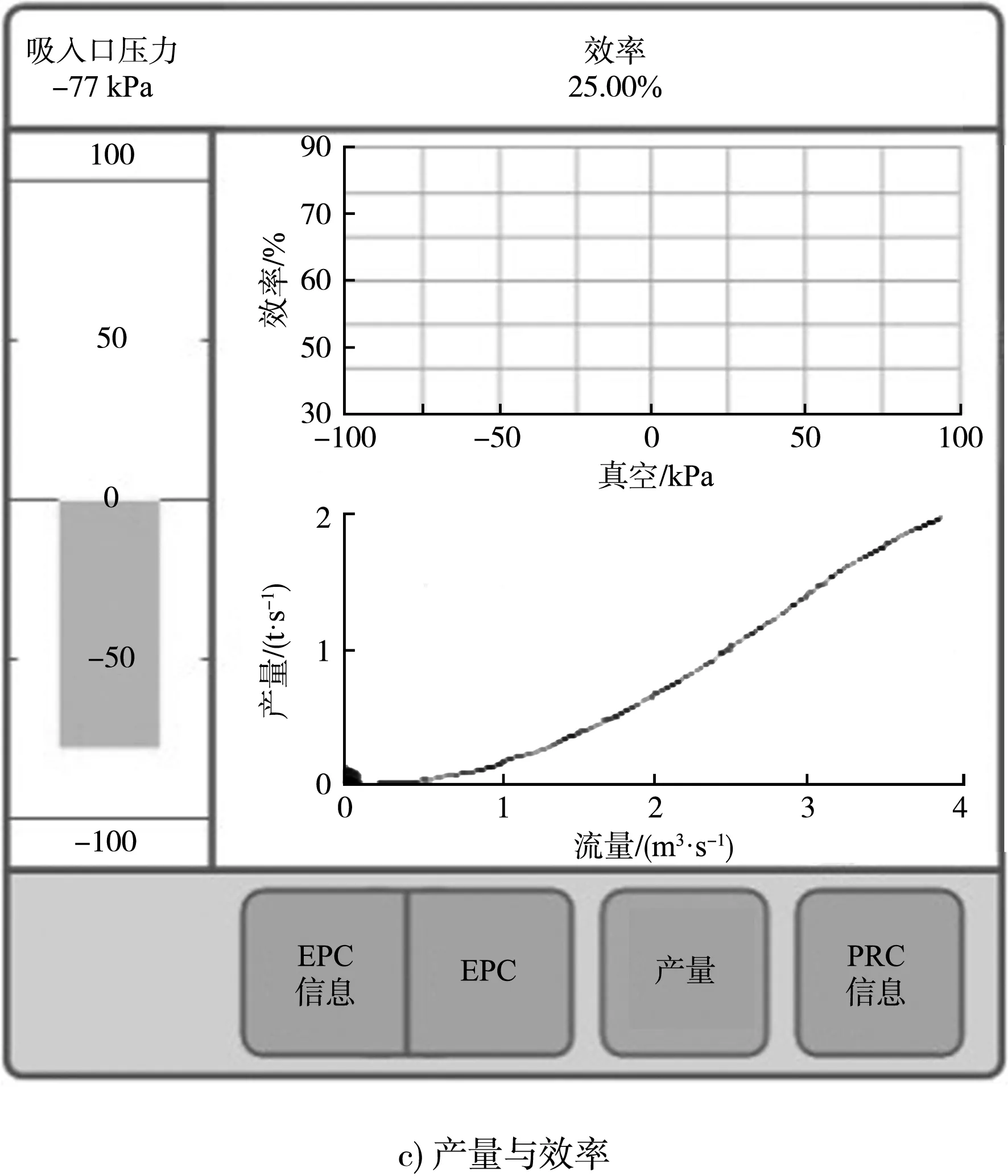
图3 显示界面
2 试验工况
2.1 试验地点
本试验在滨州港区3万吨级航道工程进行,航道总长17.5 km,有效宽度130 m,通航底高程-9.8 m,乘潮水位2.78 m,航道设计边坡1:7。测试区段K5~K9,长4 km,平均水深9.45 m。
2.2 气象、水文等环境条件
该海区属不正规半日潮海区,以风浪为主,涌浪为辅。测试当天天气情况:白天晴,东南风2~3级,阵风5级,浪高0~0.5 m;夜间阴,西南风4~5级,浪高1.0~1.5 m,平均流速0.15 m/s,槽中流压角约10°。
2.3 土质
施工底质为密实粉土,d50体积含量47.95%、粒径35.47 μm,颗粒分析曲线见图4。
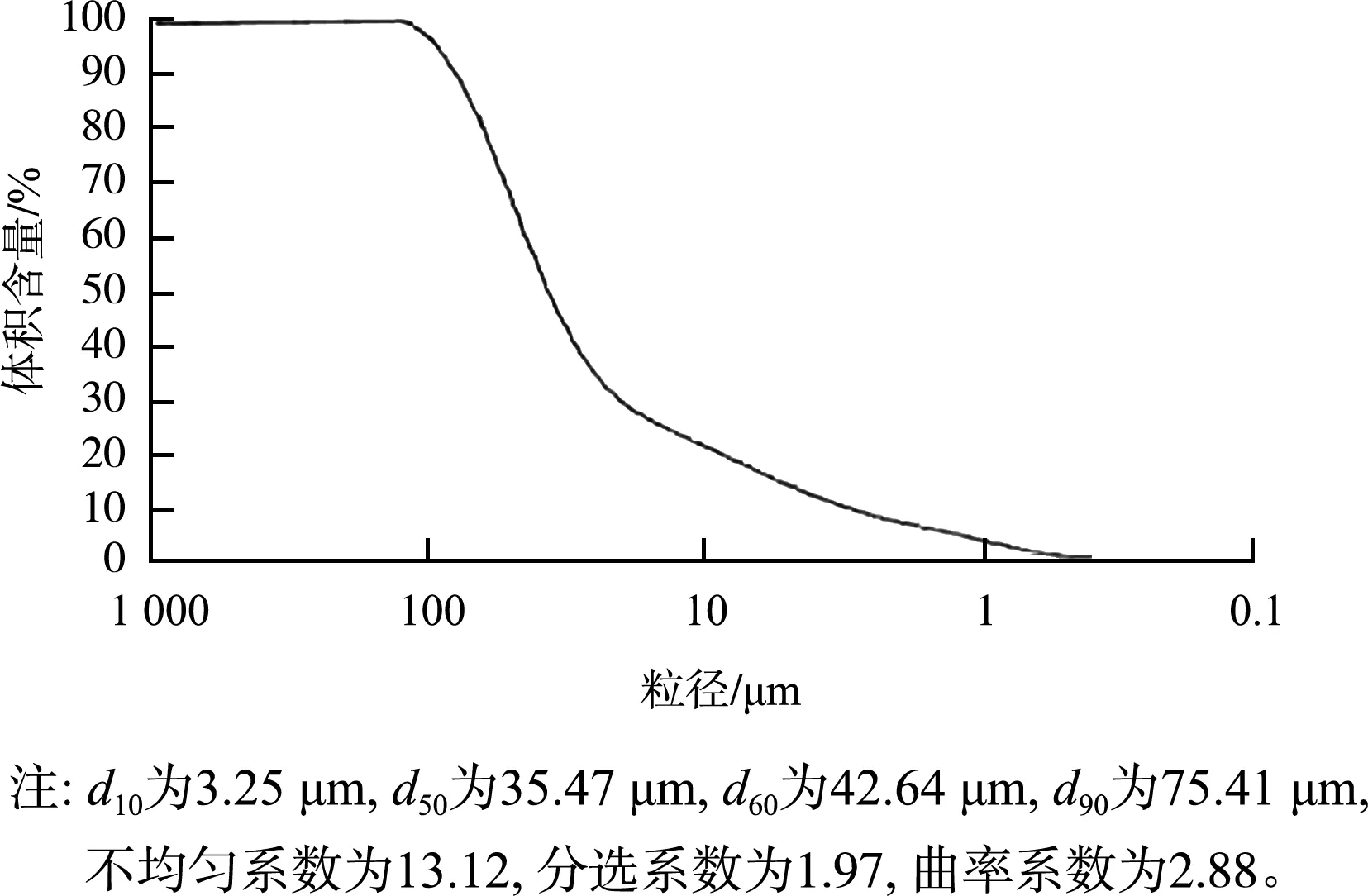
图4 颗粒分析曲线
2.4 工艺参数
航速3 kn,波浪补偿器压力2.4 MPa,高压冲水压力0.9 MPa,除TSC、AVC、EPC外,开启ADWC(耙头绞车自动控制器)、ADC(自动吃水控制器)等自动功能。
3 结果与分析
3.1 数据来源
本次数据为2019-06-01—2019-07-03“航浚6008”轮的施工数据,根据工况的相同性、近似性及代表性原则,取2019-07-02的第3、6船次数据进行对比分析。
3.2 数据分析
3.2.1性能
本文通过海上试验,在同种工况下,对比分析ECO和MANUAL控制时的吸入真空、流速和挖掘密度随时间的趋势。同种工况下,ECO和MANUAL控制模式的吸入真空、流速、挖泥密度时程曲线见图5。
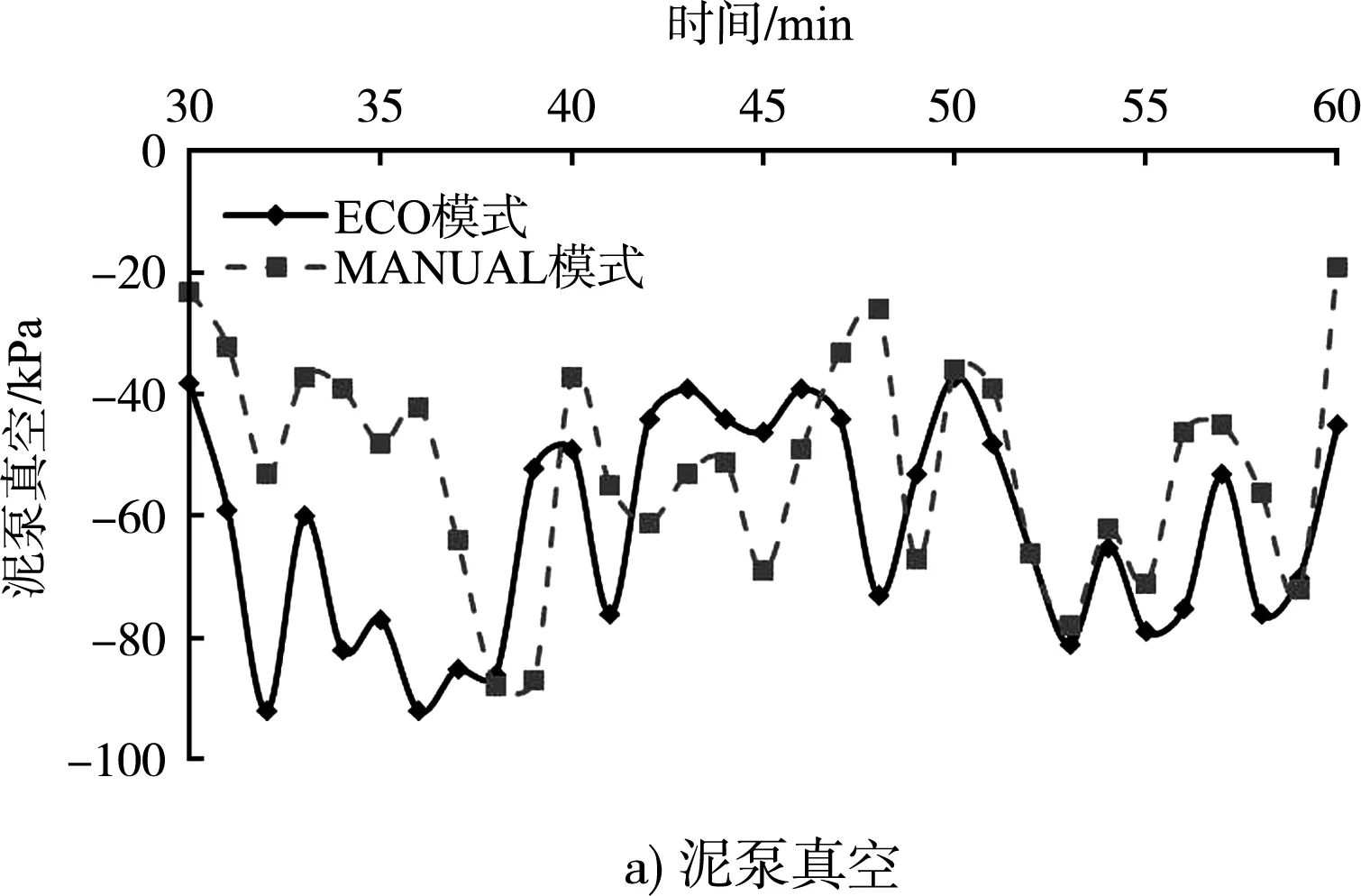


图5 ECO和MANUAL控制模式的时程曲线
由图5a)可知,ECO模式下的吸入真空整体大于MANUAL控制模式下的吸入真空。相对于人工操作的不稳定性和偶然性,ECO模式下,无人工干涉,控制波动小,稳定时吸入真空最大可达81 kPa,体现了ECO模式在稳定性方向的优势。
由图5b)可知,ECO模式下的流速整体稍大于MANUAL控制模式下的流速,稳定后两者波动相似,但ECO模式下流速稳定更快,且波动范围更小,体现了ECO模式在流速控制方面的优势。
由图5c)可知,ECO模式下的挖泥密度整体高于MANUAL控制模式下的挖泥密度;ECO模式下挖泥密度在1.065~1.214 t/m3之间,MANUAL模式下挖泥密度在1.055~1.201 t/m3。由此可知,通过与泥泵、航速等因素的寻优匹配,ECO模式下挖泥密度提升,装舱效率提高。
3.2.2产量
由于受波浪干扰、土壤条件和河床变化,产量很不稳定。本文通过两种模式下的产量时程曲线,直观显示出产量的波动幅度,如图6所示。
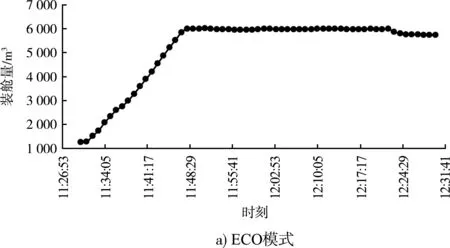

图6 ECO和MANUAL控制模式的装舱量
由图6可知,与MANUAL控制模式相比,ECO模式下的产量稳定性得到很大提升,且产量均值更大,装舱量和装舱效率得到显著提高。
3.2.3经济性
装舱时间和燃油消耗量是衡量疏浚效率及经济性的直观、重要的指标。在海上试验期间,在同样装舱时间下,MANUAL和ECO模式的装舱土体积和燃料消耗量对比见图7。
由图7及海上试验结果可知,同样的装舱时间下,ECO模式的装舱土体积为620 m3,油耗量为0.514 t;MANUAL模式的装舱土体积为560 m3,油耗量为0.547 t;与MANUAL模式相比,ECO模式下,通过稳定装舱过程,同样的装舱时间内疏浚土体积提升了10%,燃油消耗量降低了6%。
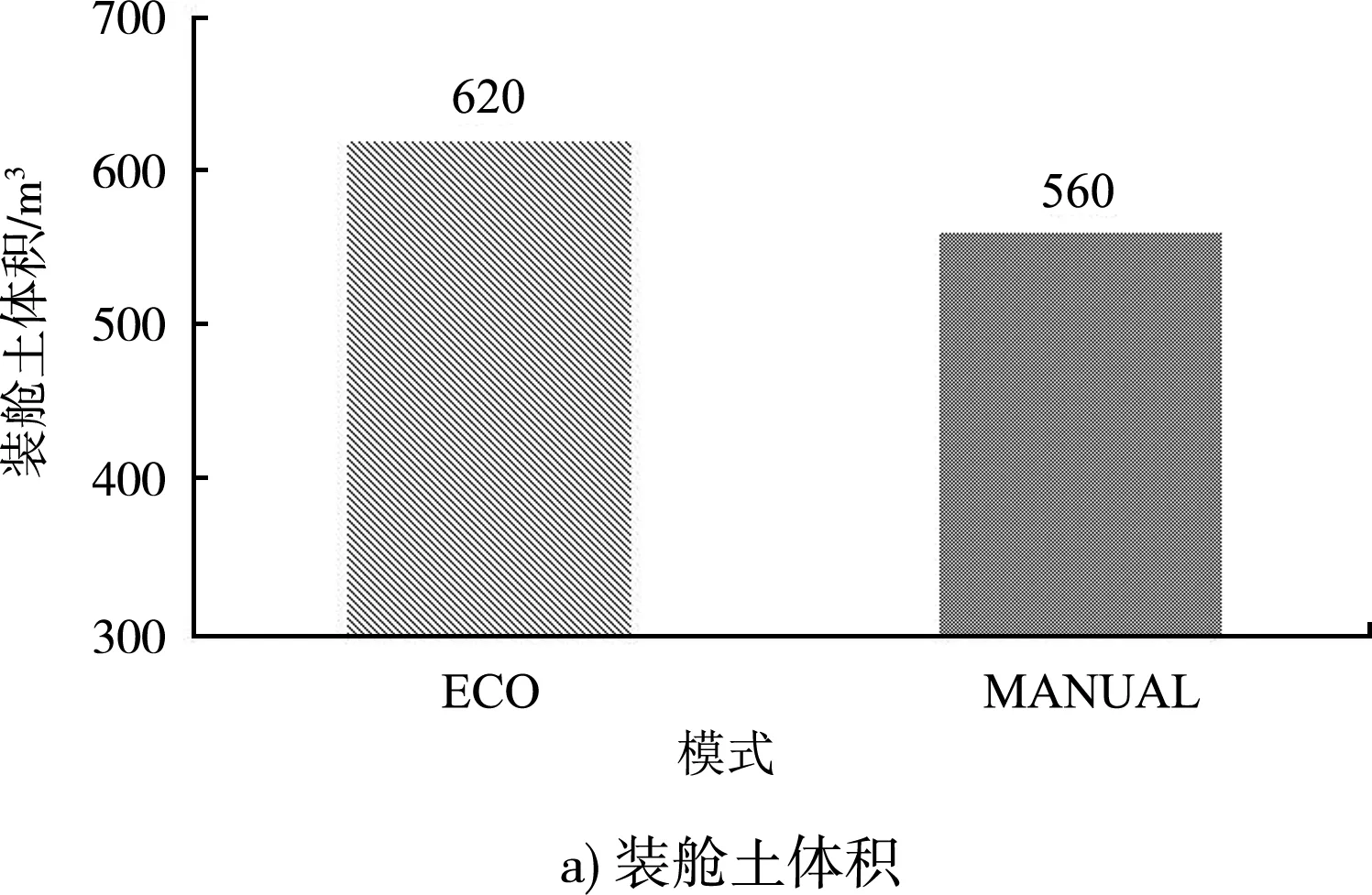
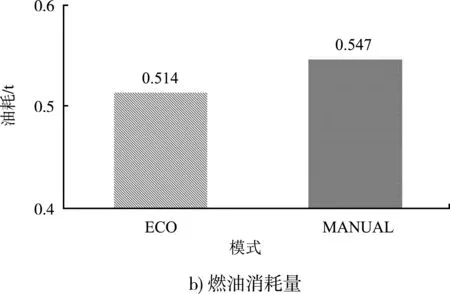
图7 MANUAL和ECO模式的装舱土体积和燃料消耗量对比
综上,ECO模式下,操作人员的工作量大幅降低,耙吸挖泥船的疏浚性能得到了显著提高。本次试验工程为平均水深9.45 m、土质d50为35.47 μm的3万吨级航道工程。由于本次试验仅针对一个工程,缺乏不同土质、不同水深的相关数据,后续将通过其他工程,继续分析验证该船舶的疏浚性能。
4 结语
1)ECO模式减轻了操作人员的工作量,减少了人员干涉及偶然性误差,降低了人工成本。
2)AVC、EPC、TSC的匹配控制显著提高了耙吸挖泥船的装载效率,真空、流速和密度控制在ECO模式下更稳定,在产量稳定性提高的同时,减少装舱时间、提高装舱量。
3)与MANUAL模式相比,ECO模式下,通过稳定装舱过程,同样的装舱时间,疏浚土方量提升10%,燃油消耗量降低6%。通过后期的运用与调试,有望将装舱时间与燃油消耗降低(缩短)15%,达到国际最先进水平。
4)此外,通过感知系统、虚拟现实与增强现实技术、岸基通信技术的应用,国内疏浚业未来实现疏浚船舶全智能化,达到无人疏浚,值得期待。