无线网络控制系统中多传感器估计性能优化研究
2020-06-22胡亮孙杨燕
胡亮 孙杨燕
摘 要:在无线网络控制系统中,多传感器之间通过信道传输数据时可能会产生时延以及丢包等现象,这种传输误差以指数级增长,造成在某个时刻之后中心处传感器估计值与真实值相差过大。为降低估计误差,通过分析信道参数特征计算出信道临界丢包率,并且给出在信道质量下降时进行切换的判断条件,再利用卡尔曼滤波计算中心处传感器的估计值,在传输出现丢包时进行信道切换。仿真结果表明,通过给出的信道切换方法和切换条件,在同等传输条件下,双信道传输情况下某时刻中心处传感器的估计误差比单信道传输平均下降了23.8%。
关键词:无线网络化控制;多传感器;卡尔曼滤波;最优状态估计
DOI:10. 11907/rjdk. 191862 开放科学(资源服务)标识码(OSID):
中图分类号:TP393文献标识码:A 文章编号:1672-7800(2020)005-0195-04
0 引言
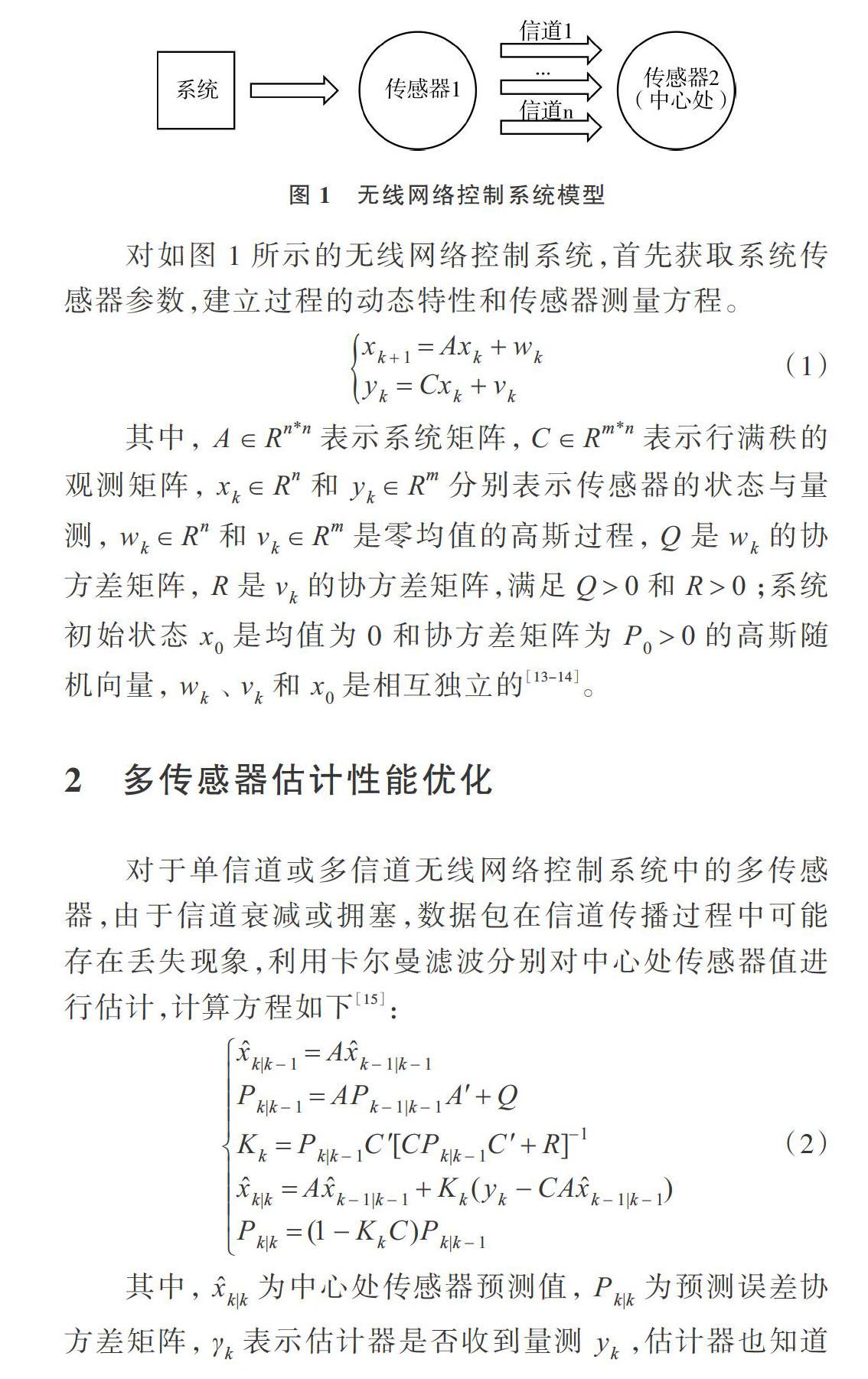
随着计算机技术、无线通信技术和网络控制技术的发展,通过无线网络实现控制器、执行器和传感器之间信息传输的无线网络控制系统(Wireless Networked Control Systems,WNCSs)发展迅速[1]。相比有线网络控制系统,无线网络控制系统不仅可以免去大量有线电缆连接,节省了系统构建和维护成本,还因其自身组成特点,大大增强了系统可扩展性[2]。正是因为这些优势,无线网络控制系统在生产生活中被广泛应用。在极其恶劣环境下的监控工作,以及灾难发生时救援信息的传递,无线网络控制系统都发挥着重要作用[3-4]。
但无线网络控制系统仍有一些问题,在被控对象以及控制器中[5],由于受实时通信条件限制,数据包所携带的信息会减少、延迟甚至重排序[6]。此时,控制回路在该系统中的整体表现不佳,甚至可能变得不稳定。目前已有的研究主要集中于单传感器估计问题,这种估计模式难以获得全面、稳定的信息,而且传输距离有限,无法满足不断提高的控制系统性能要求[7-8]。因此,有必要对无线网络控制系统中多传感器估计性能进行研究。
本文利用卡尔曼滤波讨论无线网络控制系统中多传感器之间通过多条信道获得最接近真实值的估计值问题,以降低因系统拓扑结构发生变化导致的信息传输中断风险,提高無线网络控制系统可靠性。
1 系统模型
卡尔曼滤波器用反馈控制方法估计过程状态:滤波器估计某一时刻的状态,然后以(含噪声的)测量变量的方式获得反馈[9]。卡尔曼滤波器分为时间更新方程和测量更新方程两个部分。时间更新方程负责及时向前推算当前状态变量和误差协方差估计值,以便为下一时间状态构造先验估计;测量更新方程负责反馈——也就是说,它将先验估计和新的测量变量结合以构造改进的后验估计[10]。
从一组有限的、包含噪声的、通过对物体位置的观察序列(可能有偏差)预测出物体的位置坐标及速度[11]是卡尔曼滤波的一个典型实例,雷达、电脑视觉等很多工程应用都可找到它的身影。同时,卡尔曼滤波也是控制理论及控制系统工程的一个重要课题[12]。
其中,[A∈Rn*n]表示系统矩阵,[C∈Rm*n]表示行满秩的观测矩阵,[xk∈Rn]和[yk∈Rm]分别表示传感器的状态与量测,[wk∈Rn]和[vk∈Rm]是零均值的高斯过程,[Q]是[wk]的协方差矩阵,[R]是[vk]的协方差矩阵,满足[Q>0]和[R>0];系统初始状态[x0]是均值为0和协方差矩阵为[P0>0]的高斯随机向量,[wk]、[vk]和[x0]是相互独立的[13-14]。
2 多传感器估计性能优化
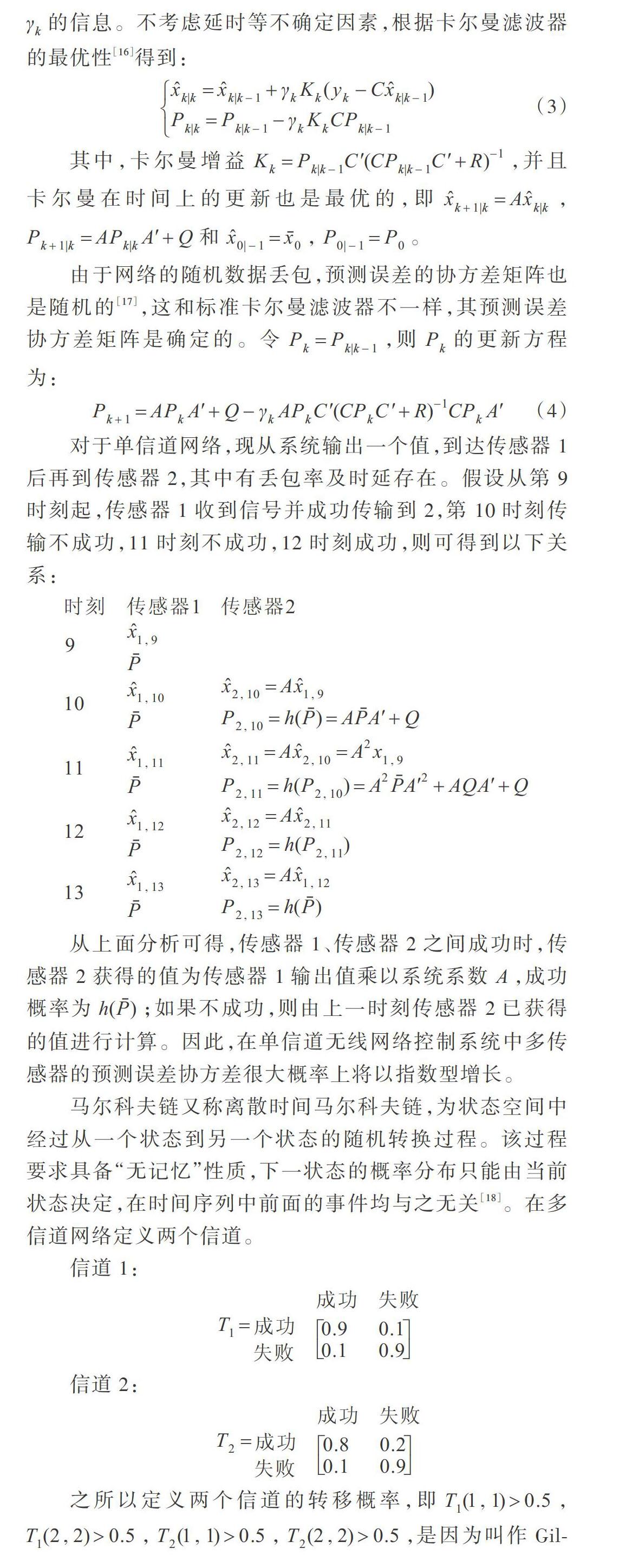
对于单信道或多信道无线网络控制系统中的多传感器,由于信道衰减或拥塞,数据包在信道传播过程中可能存在丢失现象,利用卡尔曼滤波分别对中心处传感器值进行估计,计算方程如下[15]:
从上面分析可得,传感器1、传感器2之间成功时,传感器2获得的值为传感器1输出值乘以系统系数[A],成功概率为[h(P)];如果不成功,则由上一时刻传感器2已获得的值进行计算。因此,在单信道无线网络控制系统中多传感器的预测误差协方差很大概率上将以指数型增长。
马尔科夫链又称离散时间马尔科夫链,为状态空间中经过从一个状态到另一个状态的随机转换过程。该过程要求具备“无记忆”性质,下一状态的概率分布只能由当前状态决定,在时间序列中前面的事件均与之无关[18]。在多信道网络定义两个信道。
之所以定义两个信道的转移概率,即[T1(1,1)>0.5],[T1(2,2)>0.5],[T2(1,1)>0.5],[T2(2,2)>0.5],是因为叫作Gilbert-Elliott的信道一般来说存在的记忆性取决于状态之间的转移概率[19]。马尔科夫提出一个系统在某些因素转移过程中,第N次结果只取决于第N-1次结果的影响,也就是只与当前状态相关而与之前状态无关。因此,当[T1(1,1)>0.5],[T1(2,2)>0.5]时,下一时刻的转移矩阵两个元素的收包率仍较高,以此避免产生误差[20]。
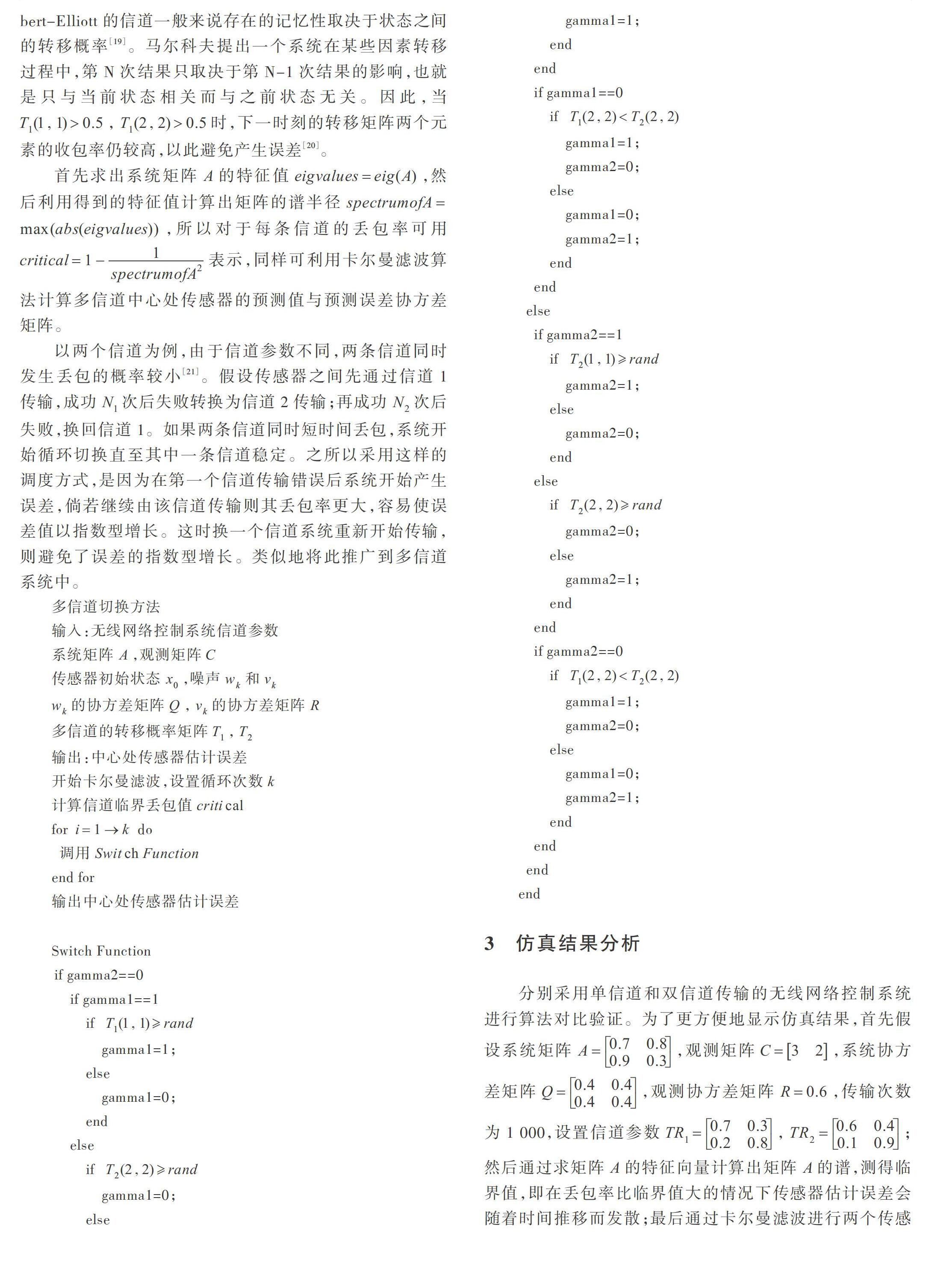
首先求出系统矩阵[A]的特征值[eigvalues=eig(A)],然后利用得到的特征值计算出矩阵的谱半径[spectrumofA=][max(abs(eigvalues))],所以对于每条信道的丢包率可用[critical=1-1spectrumofA2]表示,同样可利用卡尔曼滤波算法计算多信道中心处传感器的预测值与预测误差协方差矩阵。
以两个信道为例,由于信道参数不同,两条信道同时发生丢包的概率较小[21]。假设传感器之间先通过信道1传输,成功[N1]次后失败转换为信道2传输;再成功[N2]次后失败,换回信道1。如果两条信道同时短时间丢包,系统开始循环切换直至其中一条信道稳定。之所以采用这样的调度方式,是因为在第一个信道传输错误后系统开始产生误差,倘若继续由该信道传输则其丢包率更大,容易使误差值以指数型增长。这时换一个信道系统重新开始传输,则避免了误差的指数型增长。类似地将此推广到多信道系统中。
3 仿真结果分析
分别采用单信道和双信道传输的无线网络控制系统进行算法对比验证。为了更方便地显示仿真结果,首先假设系统矩阵[A=0.70.80.90.3],观测矩阵[C=32],系统协方差矩阵[Q=0.40.40.40.4],观测协方差矩阵[R=0.6],传输次数为1 000,设置信道参数[TR1=0.70.30.20.8],[TR2=0.60.40.10.9];然后通过求矩阵[A]的特征向量计算出矩阵[A]的谱,测得临界值,即在丢包率比临界值大的情况下传感器估计误差会随着时间推移而发散;最后通过卡尔曼滤波进行两个传感器之间估计值计算。
对于传感器数据通过单信道传输情形,将第100次传输至第150次传输的传感器1和传感器2的估计误差进行比较。如图2所示,在信道质量持续不好的情况下,传感器2处的估计误差呈指数型发散;在信道质量恢复时,估计误差直接降为0。
经过多次仿真,图3给出在单信道时传感器2在所有1 000次传输的平均估计误差。由仿真结果可知,在大多数传输时刻,传感器2的估计误差较大。
在双信道传输情况下,取第100次传输到第150次的传感器1和传感器2的估计误差进行比较。如图4所示,在某条信道质量持续恶化到切换临界条件时,系统开始进行信道切换。与图2进行对比,可知传感器2的估计误差得到了有效降低。
经过多次仿真得到双信道传感器2在所有1 000次传输中的平均估计误差,如图5所示。由仿真结果可知,在大多数传输时刻,传感器2的估计误差都比较小。在同等传输条件下,某时刻中心处传感器双信道传输的估计误差比单信道传输平均下降了23.8%。
4 结语
本文讨论了无线网络控制系统中多传感器估计性能优化问题。为了降低传感器的估计误差,本文首先利用每条信道的参数给出该条信道切换的判断条件;然后利用卡尔曼滤波计算出中心处传感器的估计值,在估计误差达到信道切换的判断边界时进行信道切换;最后利用MATLAB分别对单信道和双信道传输进行仿真分析。仿真结果表明,基于该算法的信道切换数据传输,中心处传感器的估计误差明显低于单信道传输的估计误差,且不会发散。但本研究假设各信道完全独立,而实际系统中常会有信道相互影响的情况,且当多条信道同时长时间恶化时,估计误差的优化效果会有所降低,这是下一步的研究方向。
参考文献:
[1] 林强, 吴国伟, 万安民,等. 一种无线网络控制系统的时空实时任务调度算法[J]. 计算机科学, 2016, 43(s2):278-281.
[2] 焦妍君, 许昕琪. 无线网絡控制平台的研究与应用[J]. 中国新通信, 2018, 20(1):125-129.
[3] 郭鹏飞, 张捷, 吕明,等. 无线网络控制系统一致性研究[J]. 火力与指挥控制, 2014(12):16-19.
[4] 戴雯惠. 基于无线传感器控制网络的空气环境监测系统设计与实现[J]. 软件导刊, 2016, 15(10):61-63.
[5] GAMAL M, SADEK N, RIZK M R M, et al. Delay compensation using smith predictor for wireless network control system[J]. Alexandria Engineering Journal, 2016, 55(2): 163-606.
[6] GUO P, JIE Z, MING L, et al. Fault detection for wireless network control system with multiple time delay and packet loss[C]. Control Conference,2014.
[7] 江正仙. 基于无线传感器执行器网络的分布参数系统的估计与控制[D].无锡:江南大学,2016.
[8] 刘义才, 刘斌, 张永, 等. 具有双边随机时延和丢包的网络控制系统稳定性分析[J]. 控制与决策, 2017(9):92-97.
[9] 高伟, 李敬春, 奔粤阳,等. 基于多重渐消因子的自适应卡尔曼滤波器[J]. 系统工程与电子技术, 2014(7):1405-1409.
[10] 韩萍, 桑威林, 石庆研. 一种新型非线性卡尔曼滤波方法[J]. 仪器仪表学报, 2015, 36(3):632-638.
[11] WANG S, WANG K W, TSE C K, et al. 非线性卡尔曼滤波器原理及应用[M]. 北京:电子工业出版社, 2015.
[12] DAS S, MOURA J M F. Distributed kalman filtering with dynamic observations consensus[J]. IEEE Transactions on Signal Processing, 2015, 63(17): 4458-4473.
[13] BARRAU A, BONNABEL S. Invariant kalman filtering[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2018, 1(1): 060117-105010.
[14] CHRISTOFFERSEN P, DORION C, JACOBS K, et al. Nonlinear kalman filtering in affine term structure models[J]. Management Science, 2014, 60(9):2248-2268.
[15] 刘桂辛.改进的自适应卡尔曼滤波算法[J]. 电子设计工程, 2016(2):48-51.
[16] 贺姗, 师昕. 基于内点法的不敏卡尔曼滤波算法[J]. 软件导刊, 2017, 16(6): 40-44.
[17] 赵国荣, 廖海涛, 韩旭, 等. 具有丢包补偿的分布式一致性融合估计器[J]. 海军航空工程学院学报, 2018, 33(3): 282-288.
[18] 毛乐琦. 基于隐马尔科夫模型的无线传感网节点故障诊断算法[J]. 计算机应用与软件, 2014(1):132-135.
[19] PARDOUX E, WAKOLBINGER A. A path-valued markov process indexed by the ancestral mass[J]. Statistics, 2015(1):468-473.
[20] 季石宇,唐良瑞,李淑贤,等. 基于用户体验质量和系统能耗的异构网络联合接入选择和功率分配策略[J]. 电信科学,2017,33(11): 47-55.
[21] 陈红兵,王元鑫,赵国荣,等. 一种带随机时延和丢包的分布式多传感器融合估计方法[J]. 海军航空工程学院学报,2018,33(5):54-59.
(责任编辑:杜能钢)
