一种无线控制的大型LED灯光阵列装置设计
2020-06-22朱云龙韩贤会李悦光梁雄杰
朱云龙,韩贤会,李悦光,梁雄杰,陈 敏
(1.合肥探奥自动化有限公司 智能信息化部,安徽 合肥 230027;2.中建钢构有限公司 技术部,广东 深圳 518000)
0 引言
LED灯光阵列通过上下运动的发光小球和变幻多彩的灯光演示各种平面或立体造型,集成了伺服电机控制、灯光控制、图形像素、视觉艺术等多类学科技术,是一种新颖的高科技动态雕塑。2015年,阿联酋阿布扎比展出过一套由1 000个LED灯组成的灯光阵列,取名为“Kinetic Fly”,该装置由发光小球、线缆、电机模组等组成。发光小球为直径约120 mm的RGB LED灯;线缆由灯的电源线和RGB三根信号控制线合并绕制而成,单根线缆直径超过5 mm,用于拉动灯上下运动及控制灯颜色变化。电机模组采用步进电机,用于带动转盘卷扬钢丝绳上下运动,线速度约0 m/s~0.5 m/s,行程约3 m~6 m[1]。该灯光阵列装置的线缆较为粗大,速度受限,如果在明亮环境中,大规模发光小球上密集粗大的线缆会严重影响视觉效果;如果小球需要大行程运动,也会造成线缆的转盘过大,对电机的扭矩和建筑的承重都会造成很大的负担。
本文基于柳州科技馆大型动态雕塑《天韵》的研发设计,该装置吊挂于馆内层高超过25 m的中央大厅中,包括217个LED发光小球组成的灯光阵列和18个圆环形LED屏组成的屏阵列,小球最大行程约10 m,圆环形LED屏最大行程约4 m。该装置运行在空旷明亮的大厅中,且小球运动行程较大,已有的灯光阵列技术不适用于本场合。为此,本文设计了一种灯光阵列装置,该装置克服了现有技术的缺点,为灯光阵列的扩展应用奠定了坚实的基础。
1 装置总体设计
装置主要由钢架平台1、小球电机模组2、LED屏电机模组3、圆环形LED屏4、钢丝绳5、LED发光小球6、吊装组件7等组成,整体结构如图1所示。
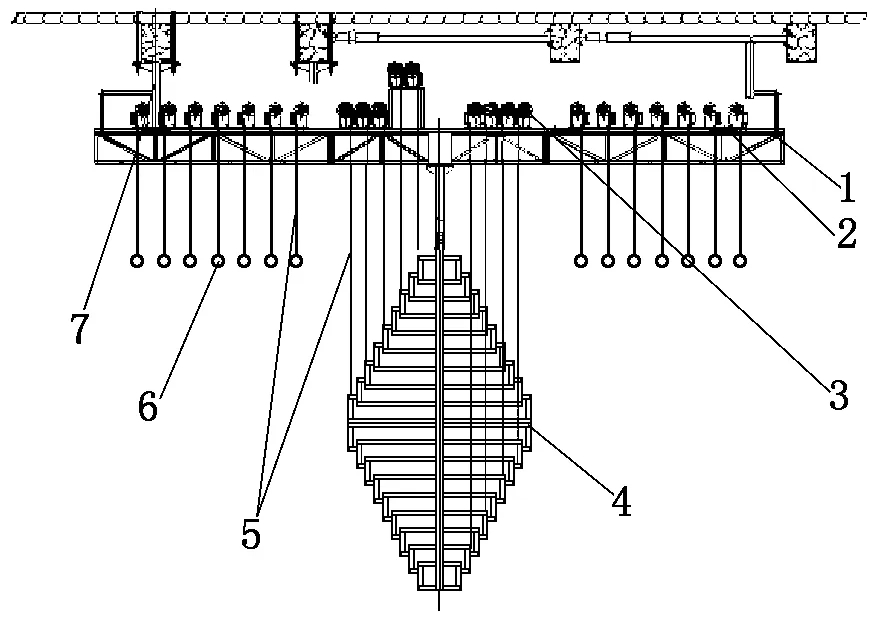
1-钢架平台;2-小球电机模组;3-LED屏电机模组;4-圆环形LED屏;5-钢丝绳;6-LED发光小球;7-吊装组件
吊装组件固定于建筑承重梁,用于安装固定钢架平台,钢架平台用于安装固定小球电机模组和LED屏电机模组。每个电机模组卷扬一根钢丝绳上下运动,末端固定发光小球或LED屏,其中每个发光小球由一根钢丝绳固定,每个LED屏由三根钢丝绳固定。发光小球均匀排列成7层圆环,相邻两层圆环中心间距为370 mm,总共217个。LED屏呈圆环状,环高为360 mm,共有9种不同直径规格,最大直径为2 521 mm,最小直径为687.5 mm,共18个LED屏。本文主要围绕LED灯光阵列的设计进行阐述。
2 小球电机模组设计
小球电机模组由电机1、模组支架2、发光小球3、灯板组件4(含LED灯板及无线控制子节点)、钢丝绳5和转盘6等组成,单个小球直径为150 mm,行程最大为10 m。小球电机模组结构如图2所示。
2.1 电机选型
小球总质量m=0.5 kg,转盘半径r=0.06 m,转盘材质为硬铝,厚度为15 mm。小球运行最大速度按照v=6 m/s计算,最大加速度a=10 m/s2,加速时间t=0.6 s,转盘最大角加速度α约166.67 rad/s2。经计算,运动过程中,小球所需最大扭矩T球约0.6 N·m,转盘所需最大扭矩T盘约0.2 N·m,总扭矩T最大约0.8 N·m,考虑摩擦损失及使用余量,效率系数取0.7,电机理论扭矩T额>1.14 N·m。
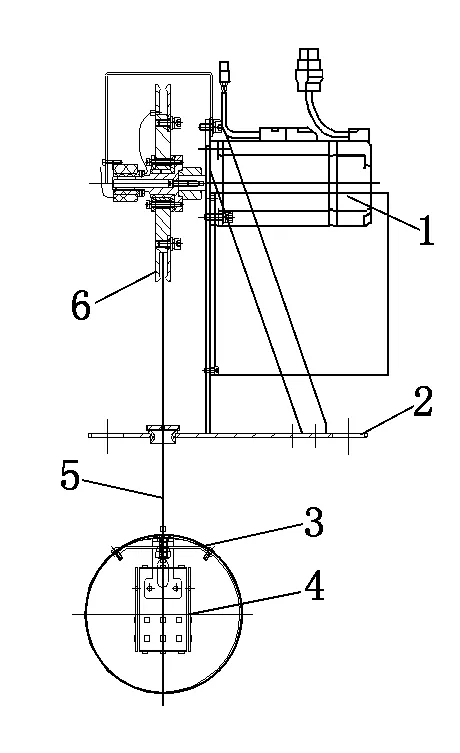
1-电机;2-模组支架;3-发光小球;4-灯板组件;5-钢丝绳;6-转盘
电机选用台达C10804S7交流伺服电机,额定电压为220 V,额定转速为3 000 r/min,额定扭矩为1.27 N·m,最大扭矩为3.82 N·m。驱动器选用台达A2-0421-E交流伺服驱动器,采用全闭环控制,具有速度控制模式、位置控制模式、扭矩控制模式,速度响应带宽为1 kHz,支持DI扩展接口和EtherCAT总线。
2.2 钢丝绳设计
本文采用灯光的供电与变色控制相分离的技术方案,需要钢丝绳既能提升小球上下运动,又能给小球内LED灯及ZigBee子节点控制板供电。钢丝绳选择铜丝作为正极,外覆钢丝作为负极,铜丝与外覆钢丝中间选用绝缘材料隔离绕制为一根特制钢丝绳。
小球内设计24颗RGB LED灯珠,单颗灯珠最大功率为0.5 W,ZigBee子节点功率小于1 W,供电采用24 V直流电,所需供电电流小于0.5 A。根据供电需求,选用直径0.3 mm的铜丝作为正极,允许通电电流大于0.5 A,最终线缆总体直径控制在1.5 mm,直径大小只有现有产品线缆直径的30%,性能获得极大的提升。
2.3 灯光变色控制
ZigBee技术具有功耗低、组网简单、成本低的特点,ZigBee支持星型、树型和网状拓扑结构,可以支持数以百计的节点,广泛应用于自动控制领域[2]。文献[3]中对ZigBee进行高密度节点通信测试,实现了单个主节点与100个子节点的通信,且在没有校验和纠错的条件下,误码率低于0.02%。文献[4]中对基于ZigBee技术的LED灯光控制方案做了详细设计。
本文发光小球的变色控制采用基于ZigBee技术的无线控制方案。ZigBee通信模块选用了TI公司的CC2530F256芯片,该芯片是用于2.4 GHz IEEE 802.15.4/RF4CE/ZigBee的第二代片上系统解决方案。CC2530使用增强型8051CPU,结合了领先的RF收发器的优良性能。芯片具有5个各自可编程的计数器/捕获通道,每个都有一个16位比较值。每个计数器/捕获通道可以用作一个PWM输出或捕获输入信号边沿的时序[5]。LED灯板集成了专用LED驱动电路,通过PWM实现R、G、B三个输出端口的256级调节控制。灯光变色控制架构如图3所示。
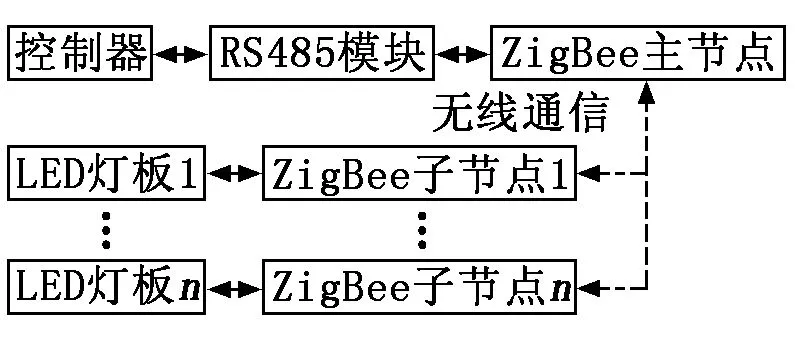
图3 灯光变色控制架构
LED灯板和ZigBee子节点放置在发光小球内部,由钢丝绳供电,LED灯能够实现RGB 256级显示,ZigBee子节点接收ZigBee主节点控制信号后,实时控制LED灯变色。
2.4 模组测试
根据以上设计,笔者搭建了实验台,开展了运行测试,电机模组位于离地约13 m高度,钢丝绳长度约12 m,如图4所示。经过30天,每天不少于12 h的运行试验,验证了钢丝绳的良好力学性能,在保证正常供电的同时,能够长时间缠绕不损坏。小球最大运行速度达4 m/s时,灯光变色控制仍然比较稳定可靠。经过测试,充分证明了本文技术方案的可行性。

图4 电机模组实验台
3 控制网络结构设计
由于装置电机数量较多,电机位置实时动态变化,数据量较大,故采用了工业自动化当前最新的现场总线控制技术——EtherCAT(以太网控制自动化技术)。EtherCAT几乎支持任何拓扑类型,包括线型、树型、星型等,1 000个I/O的更新时间只需30 μs,其中还包括I/O周期时间,单个以太网帧最多可进行1 486字节的过程数据交换,几乎相当于12 000个数字输入和输出,而传送这些数据耗时仅为300 μs[6]。控制网络结构如图5所示。
灯光阵列的控制器选用了2个倍福C6930工业PC,每个控制器通过EtherCAT总线连接112台或105台伺服驱动器,以实现217个伺服驱动器的组网连接。控制器与ZigBee主节点之间通过RS485模块连接,ZigBee主节点与子节点之间通过无线传输信号,针对217个子节点,采用3个主节点各连接56个子节点、1个主节点连接49个子节点的方案。
4 结语
本文通过特制钢丝绳、ZigBee无线技术、EtherCAT总线技术设计了一种无线控制的大型LED灯光阵列装置,相比现有产品,本文的设计极大地降低了线缆直径,增加了小球的运动行程范围,使装置可以在科技馆、博物馆、商场大厅、酒店等各类明亮高空环境下良好地运行,大大扩展了装置的应用范围。
设计过程中发现,大规模灯光在高于1 Hz的变色频率下同时进行颜色突变时,会出现少量小球变色滞后的情况,在今后的研究中,还需要对其进一步改进,以达到更好的展示效果。

图5 控制网络结构
