一种风光互补智能垃圾分类箱的设计
2020-06-21石腾卿晓梅卢卫萍戴成军王刚
石腾 卿晓梅 卢卫萍 戴成军 王刚


摘 要:为了使垃圾分类更加便捷、高效和节能,本文设计了一种风光互补智能垃圾分类箱,并通过分析控制流程来验证其可行性与实用性。它主要包括风光互补供电系统、机械运动系统、智能识别分类系统和运输自卸系统四大部分,既节能又环保,可以提高垃圾分类效果,改善人们的生活环境。
关键词:智能垃圾分类箱;风光互补供能;智能识别分类
Abstract: In order to make waste sorting more convenient, efficient and energy-saving, this paper designed a wind-solar complementary intelligent waste sorting box, and analyzed the control process to verify its feasibility and practicability. It mainly includes four major parts, namely wind-solar complementary power supply system, mechanical motion system, intelligent identification classification system and transportation self-unloading system, which is both energy-saving and environmentally friendly, can improve the effect of garbage classification, and improve people's living environment.
Keywords: intelligent waste sorting box;wind-solar complementary energy supply;intelligent identification and classification
2019年6月,住房和城乡建设部在《关于在全国地级及以上城市全面开展生活垃圾分类工作的通知》(建城〔2019〕56号)中提出全面启动生活垃圾分类工作[1]。在国家加快推进生态文明建设和人民对高质量生活环境需求日益增强的背景下,垃圾分类产品的设计和优化非常必要。为实现其高效、节能和智能化,本文设计了一种风光互补智能垃圾分类箱(以下简称智能垃圾分类箱),弥补了传统垃圾箱利用率较低、结构功能单一、垃圾分类处理步骤复杂等缺点,是一款集风光互补供电、机械运动、智能识别分类和运输自卸为一体的多功能自动化垃圾分类设备,在节能环保领域有较好的应用价值。
1 总体设计方案
智能垃圾分类箱的总体设计方案如图1所示,主要包括主体结构、风光互补供电系统、机械运动系统、智能识别分类系统和运输自卸系统五个模块。
2 系统模块设计
2.1 智能垃圾分类箱主体结构的设计
智能垃圾分类箱顶部安装太阳能电池板和小型风力发电装置,并安装一个锂电池用于储存两者所产生的电能,如图2(a)所示。
太阳能电池板下面配置了一个装有红外传感器的可收缩箱盖,当人体距离垃圾箱15~25 cm时,箱盖会自动打开,待垃圾扔进垃圾箱内并且检测不到人手靠近之后,箱盖自动关闭,随后垃圾进入智能分类程序。
机械转盘装置由L形刀、圆锥形支撑架、圆柱形垃圾收纳转盘和压缩装置组成,液压举升装置位于机械转盘装置的底部,机械转盘装置侧视图如图2(b)所示。
粉碎装置位于机械转盘装置下面,由排列整齐的螺旋形粉碎部件构成,其下面配有一个倒立的等腰梯形状收集装置,其中一侧设有沿内壁的废液收集水渠;智能垃圾分类箱的足部设计了两个“绿化带”,用于吸收粉碎装置处理的肥料。
通过对智能垃圾分类箱内部矩形收纳装置、机械转盘装置、粉碎装置和传统垃圾箱尺寸的分析,将智能垃圾分类箱尺寸设计为0.8 m×0.8 m×1.5 m。
2.2 风光互补供电系统的设计
智能垃圾分类箱所需的电能采用风光互补供电技术来提供,其中电力应用主要包括智能识别分类系统、粉碎装置和移动装置等,其电量消耗计算如表1所示。
2.2.1 光伏供电模块。选用50 W的单晶硅太阳能电池板两块,将其安装于箱盖上方20 cm高度处,由支撑轴支撑,通过太阳能电池板对光角度的调节使其充分吸收光照。以南通市为例,按照月平均辐照和安装倾角进行光伏供电量计算。如图3所示,[β]为太阳能电池板所在平面与水平地面之间的夹角,[α]为太阳光线与其在水平地面上的投影之间的夹角,可根据南通地理位置选用最佳安装倾角31°,朝向正南,通过计算,得出其年发电量约为1 305 kW·h,故平均每天的发电量约为3.57 kW·h。
2.2.2 风力供电模块。选用型号名称为fy-100的小型风力发电装置[2],将其安装在太阳能电池板上方(支撑轴顶部),其主要技术参数如表2所示。
以南通市为例,进行风力供电模块的发电量计算,若平均风速[V=3.3 m/s],一天内的有效风速时间[T=15 h],根据式(1)计算可得,选用型号fy-100的小型风力发电装置日均发电量约为0.054 kW·h。
通过以上计算可得,风光互补供电系统每天的发电量为3.624 kW·h,大于2 kW·h,因此滿足智能垃圾分类箱运转所需的电能。
2.2.3 蓄电池。选用型号为12 V/200 AH的锂电池,其密封性良好,使用寿命长,电压相对稳定,用于储存太阳能电池板和小型风力发电装置产生的电能。
2.3 机械运动系统的设计
鼓风机安装在箱体最右侧,如图4(a)所示。在垃圾从投放口落入矩形收纳装置的过程中,鼓风机工作,使得纸张、枝叶等轻小物体被分离出来。旋转门安装在矩形收纳装置中依次排列,通过其旋转依次将垃圾分离出来,并且在矩形收纳装置的角落设置一个直径0.2 m的圆形落口,使得垃圾落入机械转盘装置。
矩形收纳装置底部为一个圆锥形支撑架,并在其上方焊接一个L形刀,对从圆形落口落下的垃圾进行“拉拢”处理,当圆柱形垃圾收纳转盘旋转到圆形落口下方时,L形刀迅速分叉使得垃圾落入收纳转盘内,如图4(b)所示。与圆锥形支撑架紧密连接的是圆柱形垃圾收纳转盘,高度为0.5 m,并且底部有小孔,以便废液流淌,直径根据子桶数目选择,子桶数目根据其所放置的区域调整。圆锥形支撑架装置底面圆内含有可伸缩的压缩杆件,通过光感效应检测技术可判断垃圾箱体内所剩空间大小,当圆柱形垃圾收纳转盘所容纳垃圾较多时,压缩装置由上而下进行压缩,减少垃圾占据的空间,从而提高箱体的利用率。粉碎装置位于机械转盘装置底下,采用排列整齐的螺旋形粉碎部件,其下面是一个倒立的等腰梯形状的粉碎物收集装置,并且其中的一侧设有沿着内壁的废液收集水渠。粉碎装置会对识别后的厨余垃圾、果皮、枝叶等进行粉碎处理,并将处理好的粉碎物放置在粉碎物收集装置中,残留的废液通过转盘底部的小孔流进垃圾箱一侧的废液收集水渠,粉碎物可用来对垃圾箱足部的两个“绿化带”进行施肥,达到美化环境和净化垃圾箱周围空气的目的。
2.4 智能识别分类系统的设计
智能垃圾分类箱充分利用传感器的特性进行智能识别分类系统的设计,根据不同垃圾的材质特性(金属性、透明度和电导率等)选择多个传感器组成识别系统。传感器组成框图如图5所示。
2.4.1 識别原理。位于箱体一侧的条形码扫描器对带有包装的饮料瓶、包装袋等进行种类识别;金属探测器运用电磁感应的原理以区分金属和非金属材质的垃圾;选用红外对射式传感器(型号E3F-5DN1),用以区分非金属垃圾中的透明和非透明垃圾;透明垃圾以玻璃和塑料为主,且玻璃与塑料的电导率特性不同,因此运用电容式传感器来区分透明垃圾中的玻璃和塑料;不同材质的物体敲击同一物体时所产生的声音频率信号不同,并且不同种类垃圾的外形不同,可将声音传感器(型号MCA-BTA)与X光速射线管扫描相结合来提高垃圾种类识别精度[3]。
2.4.2 识别过程。垃圾从投放口落入矩形收纳装置,位于箱体一侧的条形码扫描器对带有包装的垃圾进行种类识别,被识别出来的垃圾由旋转门进入圆形落口。同时,位于箱体最右侧的鼓风机开始运转,纸张、枝叶等轻小物体被分离出来掉落到L形刀上,然后L形刀分叉使分类好的垃圾落进圆柱形垃圾收纳转盘中。接着,第一级旋转门依次分离出垃圾,当位于旋转门横向“手臂”上的金属探测器有感应时,直接将其旋转进入垃圾收纳桶,以此来区分金属和非金属垃圾;第二级旋转门横向“手臂”上安装有红外对射式传感器和电容式传感器,对剩余的非金属垃圾进行透明垃圾与非透明垃圾的识别,其利用塑料和玻璃电导率不同的特性,运用电容式传感器对玻璃和塑料进行区分,区分开来的垃圾经过第三级旋转门进入圆形落口。其他种类的垃圾则被第三级旋转门分离和识别,利用不同材质的物体敲击同一物体所产生的声音频率不同,当垃圾与旋转门的“手臂”碰撞接触时,其轴向底部安装的声音传感器吸收到声音信号,并且借助位于箱体最左侧的X光速射线管,扫描旋转门分离出不同的垃圾,同时测距传感器对分离出的垃圾进行尺寸测量,将扫描图像、声音信号和垃圾尺寸等信息传输到后台计算机管理系统,它会根据已储备的数据来判断垃圾种类,然后与X光速射线管的扫描图像进行匹配验证,若匹配一致,则对应种类的子桶旋转到L形刀下方,实现分类收纳,反之,则将其归为其他垃圾,倾卸时采集其性质参数,不断更新后台数据库。
2.5 运输自卸系统的设计
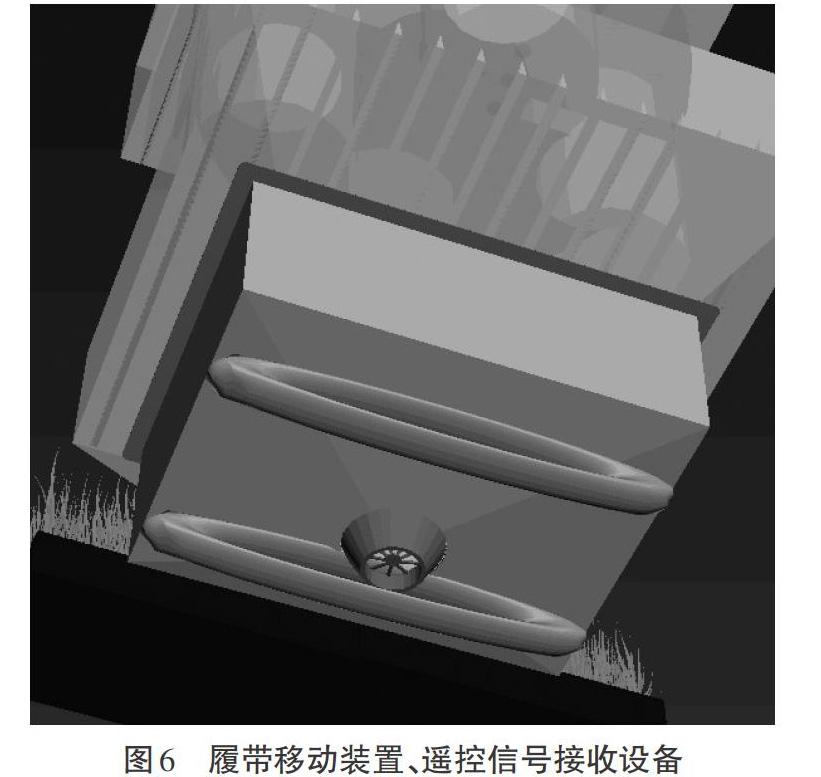
智能垃圾分类箱将GPS定位技术、遥控技术、履带移动装置和液压举升装置相结合,实现运输自卸功能。如图6所示,智能垃圾分类箱的底部安装有履带移动装置和遥控信号接收设备。当有垃圾回收车经过进行垃圾箱清理时,智能垃圾分类箱底部安装的遥控信号接收设备接收工作人员发出的指令信号,按照GPS定位技术规划的短距离路线通过底部履带移动装置移动靠近垃圾回收车。打开一侧垃圾箱门,通过转轴旋转出机械转盘装置,利用圆柱形垃圾收纳转盘底部的液压举升装置将其抬高,顶部的压缩装置开始延伸,两者组合使垃圾收纳转盘开始倾斜,完成运输自卸任务;通过网络技术实现垃圾收集、分类、回收、处理一体化运行,可根据卸除垃圾的频率等信息产生有价值的大数据,方便城市管理和资源合理利用[4]。
3 智能垃圾分类箱的控制流程
在设计智能垃圾分类箱主体结构、风光互补供电系统、机械运动系统、智能识别分类系统和运输自卸系统的基础上,本文设计和分析了风光互补智能圾分类箱的运转控制流程,如图7所示。
4 结语
本文所设计的风光互补智能垃圾分类箱既节能又环保,集垃圾分类、垃圾处理、机械运输和垃圾自卸四大功能于一体,可以提高垃圾分类工作的实效,改善人们的生活环境,在居民小区、街道等户外公共场所有广泛的应用前景。
参考文献:
[1]胡莎莎,张菏潇.我国城市生活垃圾分类困境及对策研究[J].法制与社会,2019(3):137-138.
[2]P Jenkins,M Elmnifi,A Younis,et al.Hybrid Power Generation by Using Solar and Wind Energy:Case Study[J].World Journal of Mechanics,2019(4):172-174.
[3]吴凡,孙颖,贾长青.基于物联网的垃圾智能分类回收系统的研究[J].科技与创新,2017(14):48-50.
