井下皮带地面集中控制系统改进设计
2020-06-21郭利国
郭利国
(山西新元煤炭有限责任公司,山西晋中 030600)
0 引言
随着社会对能源需求量的不断增加,煤矿工业越来越壮大。皮带机作为煤矿业发展的重要工具,能实现煤矿的连续远距离输送,且具有运输能力强、工作阻力小、使用寿命长等特点[1],可适应比较恶劣的工作环境,在煤矿工业中有着举足轻重的作用。
为了让皮带机更加高效安全地运行,需对皮带机进行地面集中控制,主要对其设备的起停功能及互锁功能进行控制,这样既可以减少井下工作人员数量,降低员工的劳动强度,也可以提高员工的自身安全性,切实达到了减员增效的目的,实现了设备生产效率的提高。
1 井下皮带机常见故障
井下皮带机常见故障主要表现在以下几个方面。
(1)皮带机产生异常噪声。由于井下环境比较恶劣,噪声不容易被识别,有可能会造成严重的停车事故,影响人身财产安全[2]。
(2)皮带跑偏故障。皮带跑偏是一种比较常见的事故,由于煤矿物料主要采用人工方式进行卸载投放,难免会有不均匀的情况,因此会造成皮带跑偏,发现不及时会严重影响设备的生产效率[3]。
(3)皮带断带或打滑等事故。由于皮带长时间高负荷的工作,导致皮带张力有限,有可能会出现疲劳断裂或打滑现象,轻则影响产量,重则危害人身安全[4]。
因此,针对这些故障,加大对皮带机的集中控制功能成为当下的重点任务。
2 井下皮带地面集中控制系统工作原理
地面集中控制系统主要由驱动系统、电力系统、电控系统、PLC控制系统以及各类传感器系统组成。其中,PLC控制系统通过通讯电缆与操控台进行连接,从而实现皮带机的地面集中远程检测和控制[5]。PLC控制系统通过光电转换系统,将电信号转换为光信号,然后通过光纤路线传输,使用智能分站、光纤收发器接入工业交换机,并与地下设备进行连接,建立了两者之间的连接接口。该系统在完成对所有接口和设备进行编程和对点之后,向每个客户端发出信号,客户端便可实现地面对井下设备的远程地面集中控制。
3 控制系统改进设计
改进设计后的皮带机控制系统不仅能实现对皮带机起停、互锁等基本功能的控制,还可以在控制面板上显示信号,实现跑偏保护、撕裂保护、机头堆煤保护等功能,而且还实现了保护过程中带有语言预警功能,可以更加直观和方便地达到监视、控制、数据存储等目的。
3.1 改进方案设计
首先在皮带机机头安装一个控制器,由于控制器本身带有继电器的输出点和输入点,这样该控制器就可以接收到如跑偏、断裂、打滑、堆煤等转换的输入信号,并进行信号的输出、控制开关的闭合和打开等操作,从而完成皮带机的起停操作。同时在整个皮带沿线安装多个组合扩音电话,在终端通过信息耦合方法将信号通过语音预警的方式传出,从而实现地面的集中控制。
3.2 井下皮带地面集中控制系统具体设计
3.2.1 关键传感器设计
在控制系统中涉及的传感器种类比较繁多,其中,至关重要的4种传感器包括压力传感器、堆煤传感器、跑偏传感器、速度传感器,因此,对该4种传感器进行了设计。
(1)压力传感器
压力传感器选用了DG1205型号,主要用于检测皮带是否出现打滑现象。其检测过程为:首先对皮带设置张力的上限和下限,如果压力超出该极限范围,传感器将会把信号传输给地面控制系统,从而重新调整皮带张紧力[6]。张紧力设定如图1所示。
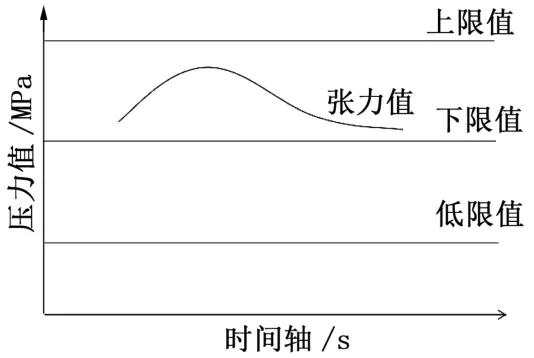
图1 张紧力设定范围
(2)堆煤传感器
堆煤传感器选用了GUD330-D型号,主要安装在皮带搭接的地方,当机头出现了堆煤或者皮带堆煤不均匀等现象时,该设备就会发出报警信号,通知控制系统执行故障处理或者停车操作。
(3)跑偏传感器
皮带跑偏传感器选用了GEJ-15-P型号,当皮带一旦出现跑偏的情况时,皮带就会触碰到传感器的压力感应器,将压力信号转换为电信号和声音信号,通过控制系统传输到地面,通知控制系统执行停车命令。
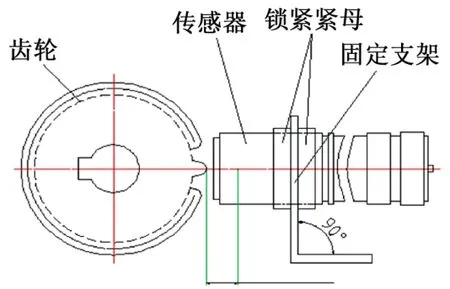
图2 皮带运行速度控制结构图
(4)速度传感器
皮带在运行过程中要严格控制其速度,因为皮带的速度直接关系到齿轮的啮合情况,这样可以更好地监控皮带的运行状态[7]。因此,选用了GSC-200/1000-SC型速度传感器,通过调整传感器与齿轮之间的间隙S值来实现皮带速度的控制。皮带运行速度控制过程的结构组成图如图2所示。
当齿轮在旋转过程中,间隙S值会出现有规律的变化,并在传感器前端进行不断地扫掠变化,由此产生了感应电动势。感应电动势产生感应电压,通过感应电压来控制皮带速度。感应电动势的频率[8]为:

式中:f为信号频率,Hz;vd为输送带速度,m/s;z为齿轮齿数;d为传感器测量杆直径,m。
3.2.2 PLC电气控制系统优化设计
皮带机地面控制系统的核心是PLC控制系统,PLC程序具有修改简单、结构清晰的特点[6],主要由组织块(OB)、功能块(FB/FC)、数据块(DB)等构成。其中,组织块(OB)主要是输出端口,每一个组织块对应一种功能;功能块(FB/FC)对应用户的子程序,用来存储或者记忆组织块中的数据信息,该模块与组织块直接连接使用,没有保存功能;数据块(DB)是完成存储数据的模块。PLC程序调用过程如图3所示。
该系统中增加了一个液压无源常开点,通过液压张紧系统控制信号来控制系统的起停,如果信号延迟,那么设备将不能启动。同时为了保证各种保护功能的正常运行,在PLC箱中加入急停开关的接入点,通过传感器实现接入点与保护功能的直接对接。
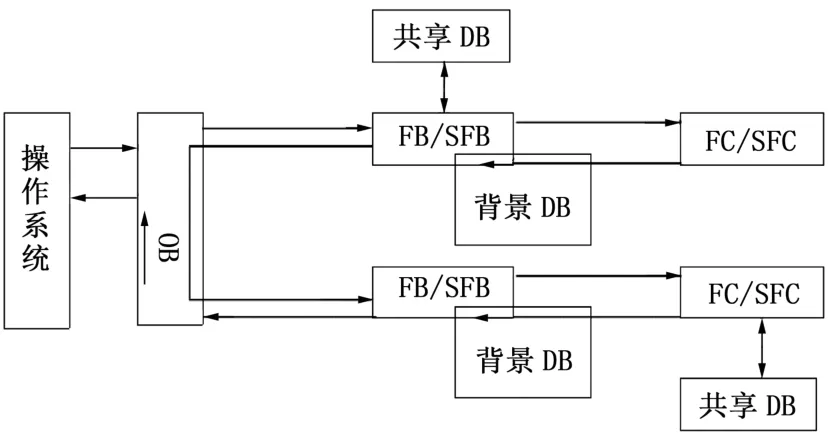
图3 PLC程序调用过程
4 改进后效果分析
本文对目前皮带机存在的问题,有针对性地对地面集中控制系统进行优化升级,并制定了切合实际的优化方案,从而提高了井下皮带机地面集中控制系统的自动化程度。
改进后的控制系统在北翼煤矿应用过程中效果良好,功能正常,提高了皮带机的生产效率,在应用改进系统的一年过程中,提高了煤矿25%的生产率,取得了良好的效益。同时,皮带机的故障发生率降低了20%左右,减少了企业因皮带机故障而导致的经济费用支出。
5 结束语
通过对井下皮带地面集中控制系统的优化升级研究,对基于PLC控制的皮带机集中控制系统进行优化升级,实现了更加自动化的地面集中控制功能,从而提高了矿井的安全性和高效性,切实做到了减员增效。改进后的控制系统具有如下效果。
(1)实现了井下皮带机地面集中监控,并可以语音预警,在整个皮带沿线安装多个组合扩音电话,实现了地面集中监控,更加智能自动化。
(2)实现了跑偏保护、撕裂保护、机头堆煤保护等重要功能,由于在控制系统中嵌入更多传感器,可以实现信息的耦合,在皮带机存在风险时可以进行报警保护。
(3)实现了各个中端的分布式控制,可完成在各个不同的端口进行分布式管理,提高了管理水平和自动化程度。
(4)该研究对提高中国矿井皮带机集中控制方面有一定的借鉴价值。
