空气净化类负荷新型转速算法和控制方式研究
2020-06-17于明
于 明
(广西电网有限公司,南宁 530023)
0 引 言
空气净化器是指对空气中存在的固态或气态形式的污染物具有一定去除能力的电器设备,按照功能可以将空气净化器划分为几个主要的部分:驱动系统、空气过滤系统及智能监测系统等。其工作过程:驱动系统使室内空气循环流动,将带有污染物的空气吸入后送至机器内部的空气过滤系统,空气过滤系统去除或吸附各种污染物后,再由驱动系统将清洁的空气吹出[1]。驱动系统作为空气净化器最核心的部件,扮演着相当重要的角色,其性能的优劣直接决定着风力的大小、净化效果等,还会影响供电电网的质量。因此,驱动电机的性能对于空气净化器的性能有着重要的影响,也对小区供电电网质量造成影响。
1 空气净化器驱动电机工作原理
无刷直流电机工作的基本原理:给定子绕组通入交替的电流,由电流产生的磁动势与转子永磁体所激发的磁动势相互作用,产生电磁转矩拖动转子旋转。无刷直流电机属于同步电机,即定子产生的磁场和转子产生的磁场具有相同的频率。因此,在电机运行过程中,定子电流产生的磁场方向需要跟随转子位置同步变化,为实现这种同步跟随,需要采用特定的方法获取转子的位置信号,控制器根据转子的位置信号控制电子换相电路使各相绕组按照特定的顺序循环导通,这样就通过对转子位置信号的检测和电子换相电路联合完成了对电机的换相,替代了传统的电刷机械换向器[2]。
图1为无刷直流电机六步换向时磁场矢量变化图。在图1(a)中,根据法拉第电磁感应定律可以知道a、b相定子绕组电流产生的磁势Fa和Fb的合成磁势为Fs,转子永磁体产生的磁势为Fr。当 时,定子产生的合成磁势Fs与转子磁势Fr之间的夹角为120°,产生顺时针方向的电磁转矩,与电机旋转方向一致,随着转子的旋转,转子磁势Fr方向也在旋转。θ由0°开始逐渐增大,当θ=30°时,定子产生的合成磁势Fs与转子磁势Fr之间的夹角为90°,此时产生的电磁转矩达到最大值。此后,随着θ的继续增大,定子产生的合成磁势Fs与转子磁势Fr之间的夹角逐渐减小,所产生的电磁转矩逐也渐减小,当θ=60°时,此时定子磁势和转子磁势之间的夹角减小到60°,此时所产生的电磁转矩与θ=0°时相同,为保证电机正常运行,电磁转矩不能再继续减小,因此,需要改变定子产生的合成磁势Fs的方向,此时改变电流的方向,如图1(b)所示,换相后定子磁势Fs和转子磁势Fr之间的夹角为120°,随着电机的运行当夹角继续减小至60°时,再进行一次换相,不断地重复这个过程,使定子产生的磁势与转子磁势之间的夹角在60°~120°的范围内交替变化,这样可以让电机的力矩最大、运转最平稳[3]。
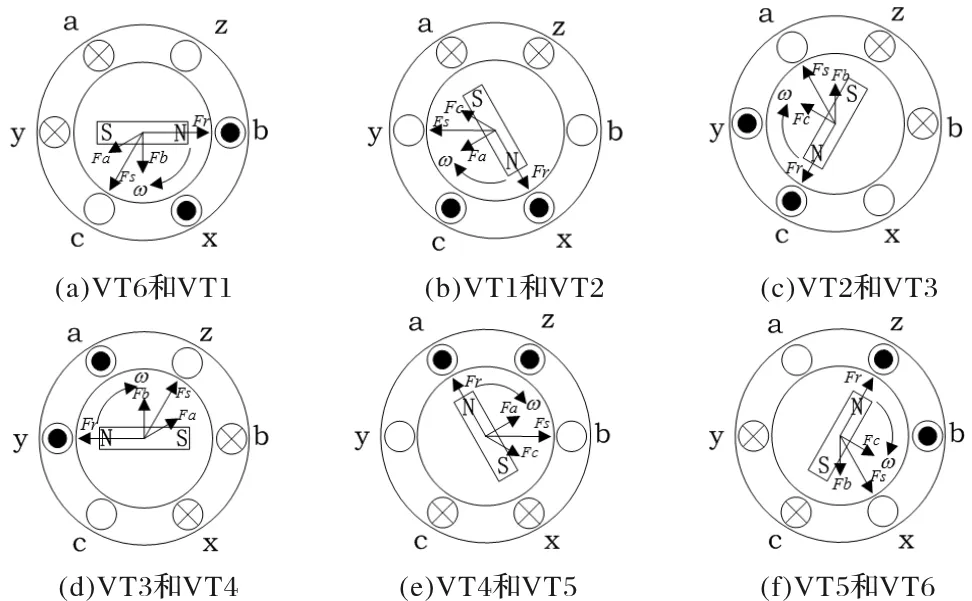
图1 无刷直流电动机六步换向时磁场矢量变化图
2 空气净化器驱动电机调速特性研究
2.1 无刷直流电机的机械特性研究
采用两两导通的无刷直流电机可以得出其导通回路的电压平衡方程:
Udc=2RI+2E
(1)
式中,Udc为直流母线电压,R为定子各相绕组电阻,I为各相定子电流,E为各相定子反电动势。
根据式(1)可以推导得出:
(2)
式中,ωm为转子的角速度,Ke为线反电势系数。结合电机的转矩方程可以得出电机的机械特性方程为
(3)
式中,Te为电机的电磁转矩,由式(3)可知无刷直流电机的机械特性方程与他励直流电机一致,得出在不同Udc的条件下无刷直流电机的机械特性曲线如图2所示[4]。从图2中可知:在相同的转矩下无刷直流电机可以通过改变供电电压进行转速调节,具有优良的调速性能,可以通过PWM控制绕组电压大小进行调速。
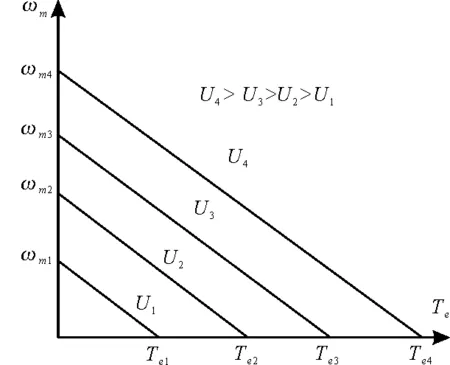
图2 无刷直流电机的机械特性曲线
2.2 无刷直流电机的控制系统
根据上文分析,为使电机可以快速起制动、突加负载动态降速小,在本课题中,控制系统采用转速、电流双闭环控制。本课题所设计的驱动电机控制系统结构框图如图3所示。其中,Spd_ref是参考转速,Spd_act是实际转速,I_ref是经过PI调节器后输出的参考电流,I_act是实际电流,U是经过PI调节器后输出的电压控制信号。
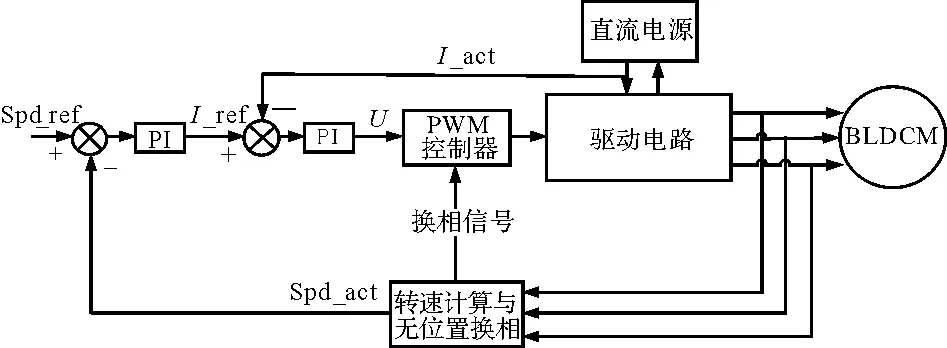
图3 净化器无刷直流电机无位置控制系统框图
3 新型转速估计算法
3.1 基于动态补偿定子绕组电阻压降的新型转速估计方法
根据上文分析可知,反电动势过零点检测法需要在检测到反电动势的过零点后延迟30°电角度,对下一组绕组进行换相,从而合理控制逆变器开关器件的触发顺序,在反电动势波形的平顶部分导通该项绕组,使相电流与反电动势的相位一致,实现电机的最佳换相。
电机实现最佳换相,可以让电机绕组获得最大的利用率,从而使电机具有较大的电磁转矩和较小的转矩脉动,此时电机的平稳性最好,实现电机的最佳运行。因此,电机转速估计的准确性对于基于反电动势过零点检测法控制的无位置传感器无刷直流电机换相至关重要。
传统的转速估计通过两次反电动势过零点间的时间差进行计算,得到的转速是两次过零点之间的平均转速,不够准确,这样导致电机无法在最佳换相时刻换相,造成电机运转不平稳,因此需要一种更为准确的转速估计方法。
对于无刷直流电机,当电流从a相流入b相时:
(4)
式中,ia、ib、ic分别是三相绕组相电流,Ea和Eb分别为A相、B相定子反电动势。
根据式(4)可得线电压:
(5)
(6)
从式(6)可知,根据线电压、相电流和定子绕组电阻可以计算电机的转速。但是电机绕组电阻R会随着温度而变化导致无法确定,且对三相电流的采样电路也增加了设计的成本。为此提出一种动态补偿定子绕组电阻压降的无刷直流电机转速估计方法,如图4所示。
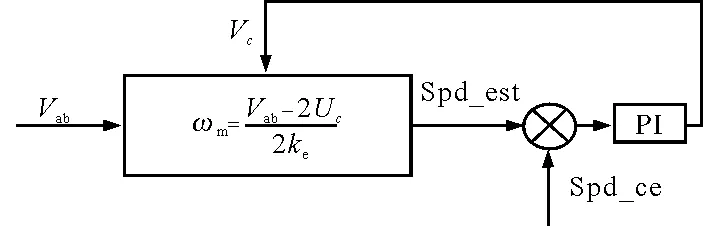
图4 动态补偿定子绕组电阻压降的无刷直流电机转速估计方法
从图4可以看出,转速估计采用PI调节器补偿定子绕组电阻压降,不再需要实时电流和电阻。其中,Spd_est是由线电压估计的转速,Spe_ce是通过反电动势过零点估计的转速,调节器的输入是两个转速的偏差,调节器的输出是补偿的定子绕组电阻压降Uc。
3.2 新型转速估计方法仿真验证
为了验证上述的理论分析,在图3建立的控制系统上进行仿真实验,将占空比设置为1,图5为电机实际转速、采用传统估计方法的转速和采用新型估计方法的转速。
从图5可以看出,在反电动势过零点时刻,采用传统的基于反电动势过零点估计的转速存在较大的误差,采用这种转速估计方法会导致电机无法在最佳换相时刻进行换相,使得电机运行不平稳,存在较大的噪声与振动;而采用新型估计方法的转速在反电动势过零点时刻更加接近电机实际转速。
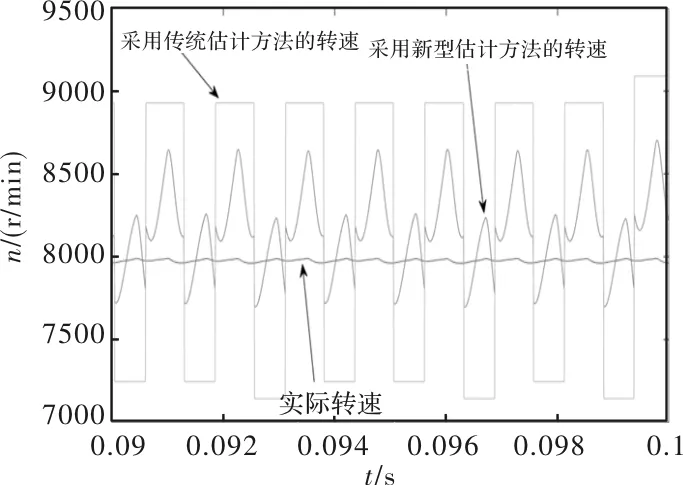
图5 两种转速估计方法的比较
4 PWM控制方式对无刷直流电机换相转矩脉动的影响
4.1 PWM方式对驱动电机电磁转矩的影响
由文献[6]可知,可以得出双管调制下无刷直流电机的平均电磁转矩为
(7)
式中,D为PWM占空比,T为PWM一个周期的时间,ia1min为双管调制下稳态时的最小电流值。
由文献[6]可知,可以得出单管调制下无刷直流电机的平均电磁转矩为
(8)
通过比较两种方式的平均电磁转矩可得:
(9)
可知,在相同的PWM频率与占空比下,无刷直流电机在单管调制方式下的电磁转矩大于在双管调制下的电磁转矩。
4.2 PWM方式对无刷直流电机非换相期间非导通相电流续流的影响
无刷直流电机运行时存在转矩脉动,使其应用受到限制,其中换相转矩脉动为无刷直流电机所特有的,且对转矩的影响严重,对电网冲击较大。采用PWM控制,当PWM为低电平时,电流总是通过PWM调制相的另一桥臂的二极管进行续流。因此,可以知道采用单管调制方式,在非换相期间导通相存在恒导通的开关管与续流的二极管同为上桥臂或者下桥臂的时刻,造成某相有电流流过的可能,若是采用PWM-ON-PWM控制方式,该相非导相期间无电流流过[7-8]。
4.3 仿真及结果分析
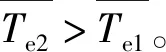
为了验证上述的理论分析,在PSIM仿真环境中建立了无刷直流电机控制系统,并进行仿真。仿真中电机参数如下:定子电阻11.9 Ω,定子电感1.38 mH,反电动势系数为16.15(V·kr/min),电机极对数为2,转动惯量为0.007 g·m2,直流母线电压为300 V,PWM频率为20 kHz,占空比设置为0.6,得到PWM-ON-PWM方式下的相电流与电磁转矩波形如图6所示。仿真表明采用PWM-ON-PWM方式的换相转矩脉动在上、下桥臂换相时最小,通过公式推导及仿真实验比较了六种常见的PWM方式下的电机电磁转矩大小、换相转矩脉动和,再考虑不同PWM方式下的开关管损耗,结果表明,无刷直流电机在PWM-ON-PWM方式下的性能优于其他几种方式。
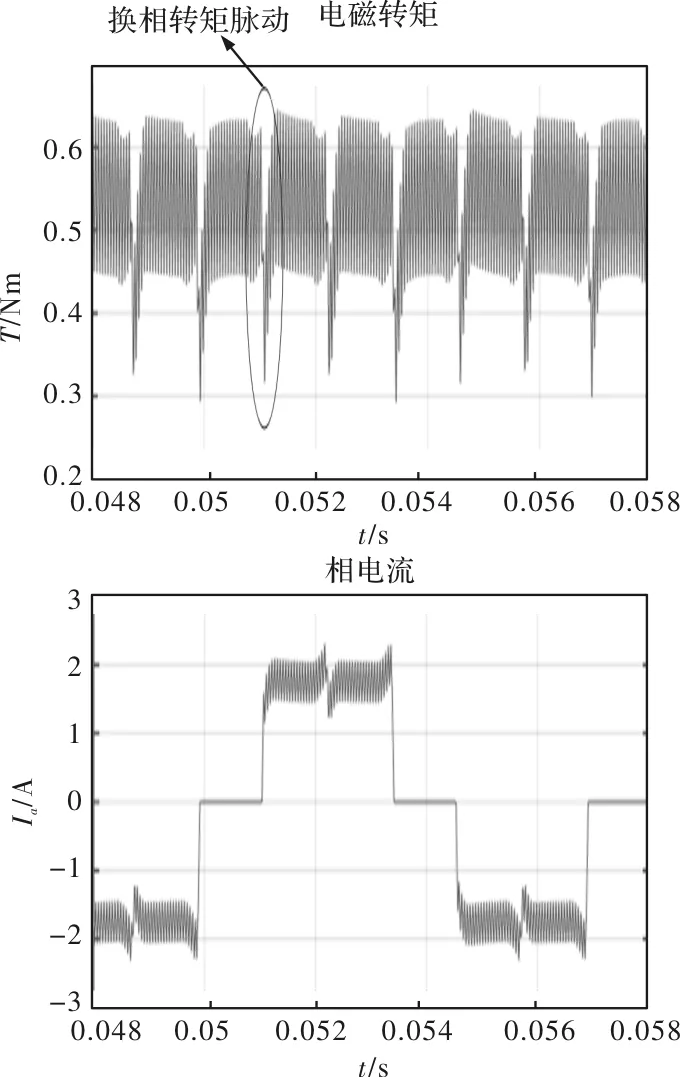
图6 PWM-ON-PWM方式下的波形
5 实验结果
在完成了对空气净化器驱动电机控制系统的软硬件设计后,搭建了如图7所示的实验平台,实验平台主要由高压直流供电部分、低压直流供电部分、电机控制系统及驱动电机组成。
图7 空气净化器驱动电机控制系统实验平台
5.1 新型转速估计方法实验波形
为了验证本文提出的新型转速估计方法,在所设计的控制系统中进行实验测试,在200 V的供电电压下,将占空比设置为1,此时电机的转速为2010 r/min,得到采用传统的转速估计方法的端电压波形和换相信号如图8所示,采用新型的转速估计方法的端电压波形和换相信号如图9所示。发现相较于采用新型的转速估计方法,采用传统的转速估计方法使得电机运行的噪声与振动较大,对电网冲击较大。
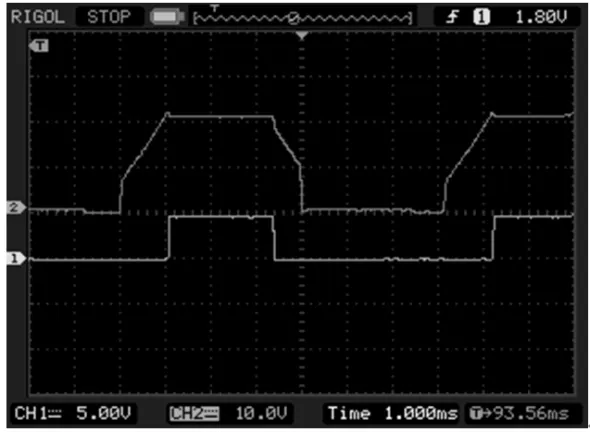
图8 采用传统转速估计方法的波形
从图8可以看出,由于估计的转速与实际的转速存在较大的误差,导致电机无法在最佳换相时刻换相,反电动势的波形呈现非正常的梯形波,电机运行不平稳,存在较大的噪声和振动;从图9可以看出,采用新型的转速估计方法可以使无刷直流电机的换相点更接近最佳换相点,反电动势的波形接近理想的梯形波,电机运行平稳。
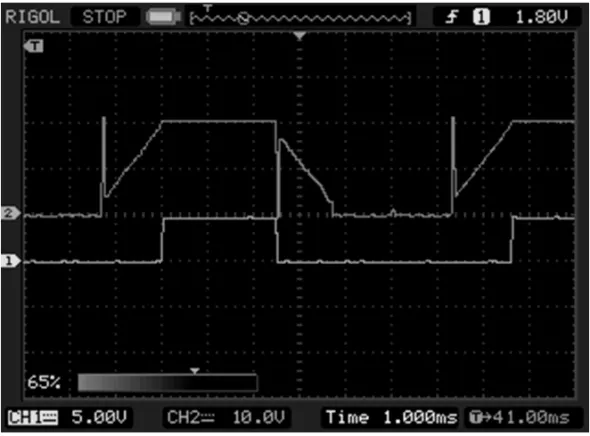
图9 采用新型转速估计方法的波形
根据图8与图9的对比可以得出结论:采用新型方法估计的转速更加接近实际转速,可以使无刷直流电机的换相点更接近最佳换相点,从而使电机运行平稳,减少电机的转矩脉动,降低噪声和振动。
5.2 采用PWM-ON-PWM方式电机运行测试
为了进一步观察电机控制系统的调速特性,在实验平台上进行试验测试,采用PWM-ON-PWM方式,从400 r/min的给定转速开始每间隔200 r/min的给定转速进行测试,记录数据并拟合调速曲线图,如图10所示,可知系统有良好的调速特性。
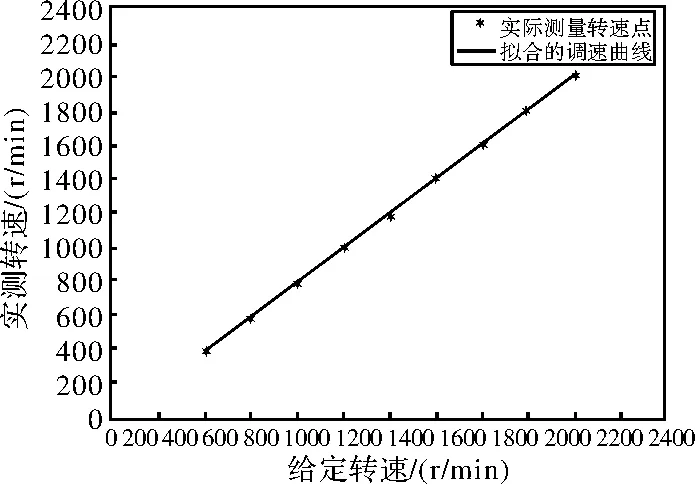
图10 控制系统的调速曲线图
通过示波器观察不同供电电压下的电机运行状态,将供电电压设置为60 V时,电机转速为600 r/min,得到电机运行时的相电压波形如图11所示。从图中可以看出相电压呈现辨析度极高的梯形波,且波形没有发生畸变,电机运行稳定。
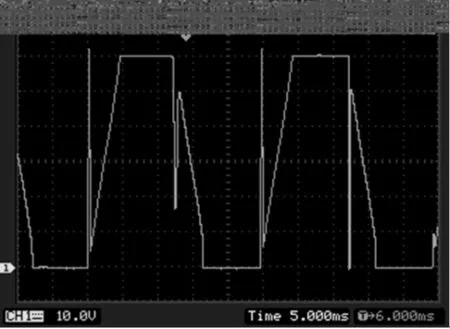
图11 60V供电电压下电机运行的相电压波形
6 结 语
本文提出了一种动态补偿定子绕组电阻压降的新型转速估计方法,通过实验表明采用新型方法估计的转速更加接近实际转速,可以使电机的换相点更接近最佳换相点,从而使电机运行平稳。
本文针对现存的多种对无刷直流电机的驱动方式,通过仿真和实验验证研究了PWM方式对驱动电机性能影响,结果表明,无刷直流电机在PWM-ON-PWM方式下的性能最优,供电电网冲击最小。
