全旋转内置式可控弯接头运动特性
2020-06-16张光伟乔阳高嗣土田帆
张光伟 乔阳 高嗣土 田帆
西安石油大学机械工程学院
随着油田勘探开发工作的不断深入,勘探难度不断增加,原有的钻井方式已经无法满足要求,旋转导向钻井技术得到了越来越广泛的应用[1-3]。旋转导向钻井系统(Rotary Steerable Systems,简称RSS)是在钻柱旋转钻进时,可以随钻实时完成导向的一种智能导向钻井系统[4-5],旋转导向钻井通过控制导向力的大小和方向实现对井眼轨迹的控制。
可控弯接头属于全旋转内置式导向钻井工具,是旋转导向钻井系统的关键执行部件,在国内尚处于理论研究阶段[6-9],一些学者对此做了卓有成效的工作[8-13]。导向钻具可控弯接头的模型是导向系统运动学研究的基础,笔者通过对旋转导向钻井工具的运动学分析,建立了导向钻具可控弯接头的空间机构模型,并通过Solidworks对该模型进行了三维运动仿真研究,得出关键部件的运动学参数,以尽可能准确地研究内外偏心环和导向轴的转速、偏心距与钻头运动的关系,深入揭示可控弯接头的运动特性,为全旋转内置式可控弯接头的开发提供参考。
1 全旋转内置式可控弯接头结构
全旋转内置式可控弯接头主要由伺服电机、偏心环组、导向轴、导向节和旋转外套等组成(图1),偏心环组包括两个相互配合的偏心环,是导向执行机构的主要部件[14-16],可控弯接头的导向功能主要由内、外两个偏心环的相对运动来实现。伺服电机分别用于驱动内偏心环、外偏心环,旋转外套随着钻柱一起旋转,旋转外套联结上部钻柱与下部钻头,是上部钻柱施加钻压与扭矩于钻头的重要桥梁,导向节是导向轴导向的支点,也是旋转外套与导向轴之间扭矩传递的受力点[17]。

图1全旋转内置式可控弯接头结构示意图Fig.1 Schematic structure of full rotary built-in variable angle bent sub
2 空间机构模型
如图1所示,导向轴插入到球座中两者配合形成一个圆柱副(4级副),球座与内偏心环形成一个球面副(3级副),内偏心环通过法兰Ⅱ与内偏心环伺服电机固连,使得内偏心环与外偏心环形成一个旋转副(5级副),外偏心环通过法兰Ⅰ与外偏心环伺服电机相连接使得外偏心环与旋转外套之间也形成一个旋转副(5级副),导向节与导向轴之间显然可以看作是一个球销副(4级副),综上可将此可控弯接头结构模型简化成一个空间机构。
全旋转内置式可控弯接头具有5个构件,图2中杆1是外偏心环,杆2是内偏心环,杆3是轴承,杆4是导向轴,杆5是底座。如图2(a)所示,根据空间机构自由度计算公式[18]得

式中,F为空间机构自由度;n为活动构件数;p1~p5分别为1~5级运动副数量。

图2钻具机构运动Fig.2 Mechanism motion of drilling tool
该全旋转内置式可控弯接头可通过调节其传动比、外偏心环转速ω1、内偏心环转速ω2,使得ω1=ω2,以实现偏心环作简单的圆轨迹运动,这时杆1(外偏心环)和杆2(内偏心环)相对于机架5的角速度的方向、大小均相等,杆1与杆2在B点处刚性连接,可以去掉图2(a)中的转动副ω2,可进一步将其演化为图2(b)所示的空间4杆机构,杆1是偏心环,杆2是轴承,杆3是导向轴,杆4是底座。该4杆机构的空间自由度为

需要指出的是,杆1(外偏心环)和杆2(内偏心环)虽然固连在一起但不一定共线,因此其初相位差的不同导致了夹角γ的差异性,但夹角γ一旦确定,此时该机构具有确定的运动,钻头可按预定的井眼轨迹钻进。
3 运动特性分析
3.1 正向运动学分析
全旋转内置式可控弯接头通过内、外偏心环的相对位置改变,产生偏心矢量,改变钻头的空间姿态[19]。通过运动学特性分析得到运动学参数可为井眼轨迹的控制理论提供参考[20]。
如图3建立空间坐标系,设导向节为A,钻头为P,环组的重心为O,AO1=l且AP=l1,偏心矢量O1O用ρ表示,与x轴夹角为θ,内偏心环的重心为O2,转角为θ2,角速度为ω2,外偏心环的重心为O1,转角为θ1,角速度为ω1,且两者的偏心矢量大小均为e,旋转外套的角速度为ω。
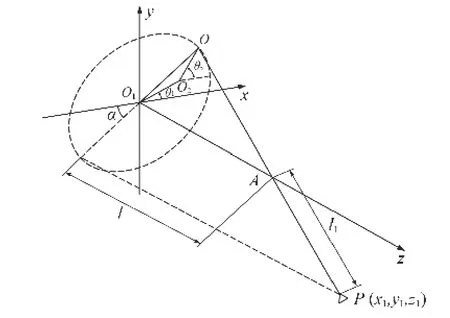
图3全旋转内置式可控弯接头空间位置示意图Fig.3 Schematic spatial position of full rotary built-in variable angle bent sub
O点的坐标为

转化为极坐标

钻头的空间坐标P(x1,y1,z1)可表示为:

由于旋转外套相对于地面坐标系会产生相对转动ω,因此在大地坐标系下O点的坐标变为

关于时间t对式(6)求导,
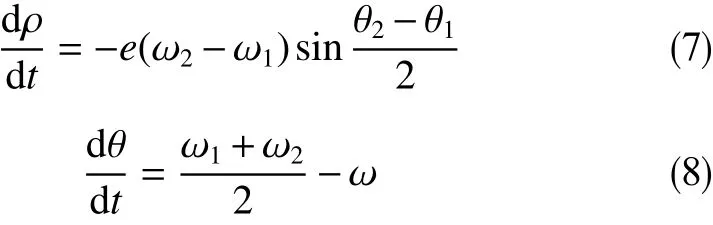
首先在工具角不变的情况下,使得ρ的一阶导数为0,θ的一阶导数非0,此时改变工具面角的条件是ω1=ω2≠ω;其次在工具面角不变的情况下,使得ρ的一阶导数非0,θ的一阶导数为0,改变工具角的条件是(ω1+ω2)/2=ω且ω1≠ω2,则两者都不变的条件为ω1=ω2=ω。取偏心距e=10 mm,l1=253 mm,l=310 mm,旋转外套旋转角速度ω=8π/3 rad/s。利用MATLAB得出钻头与偏心环在空间中仿真轨迹,如图4所示。
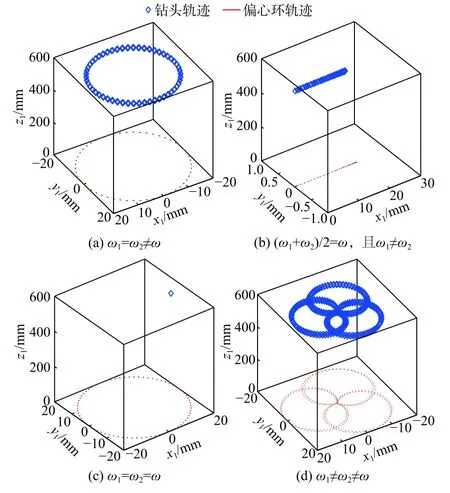
图4不同条件下钻头与偏心环的轨迹曲线仿真Fig.4 Simulated trajectory curve of bit and eccentric ring under different conditions
由图4钻头与偏心环的仿真曲线可知,当ω1=ω2≠ω时钻头和偏心环的轨迹是空间上的一个圆;当(ω1+ω2)/2=ω且ω1≠ω2时钻头和偏心环的轨迹都为空间上的一条直线;当ω1=ω2=ω时钻头的轨迹为空间中的一点,而偏心环的轨迹则为空间上的一个圆;当ω1≠ω2≠ω时钻头和偏心环的轨迹为空间上的螺旋线。
钻头的工具面角调节角速度如图5所示,可以看出,随着内偏心环和外偏心环角速度的不断增加,钻头工具面角调节角速度也在不断增加,且呈现线性相关关系。由d2ρ/d2t=0得到工具面角调节角加速度为0。
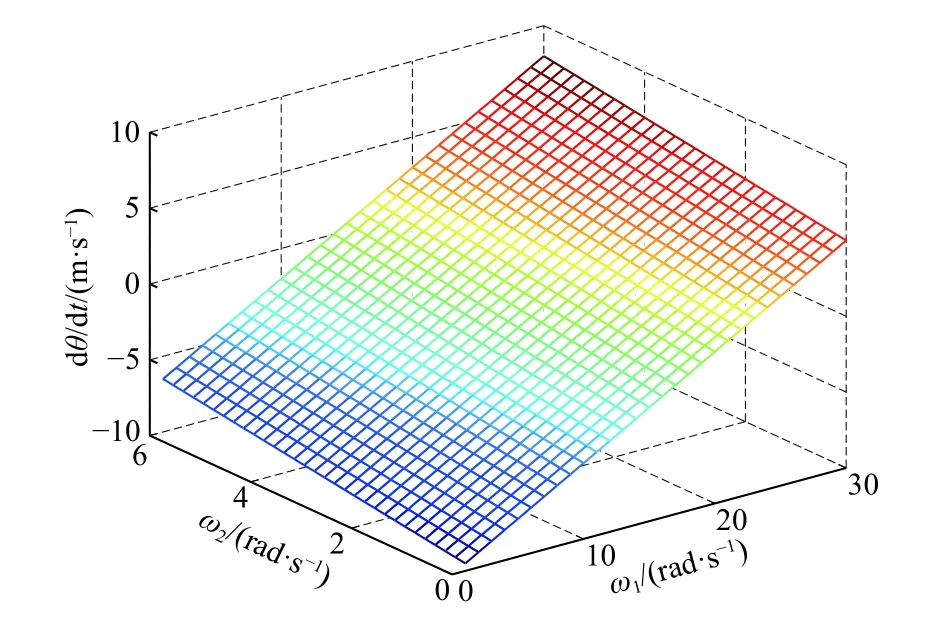
图5工具面角调节角速度与内、外偏心环角速度的关系Fig.5 Relationship between the regulation angular velocity of tool face angle and the angular velocity of inner/outer eccentric ring
工具角调节加速度为

由式(7)和式(9)可得在时刻t=2 s时,工具角调节速度和加速度随两个驱动电机转动角速度变化的曲线,如图6。随着两个电机转动角速度ω1和ω2的变化,工具角调节速度和调节加速度呈余弦规律不断变化。
3.2 反向运动学分析
反向运动学分析,即已知钻头的空间坐标,求解两个驱动电机的转角θ1,θ2。当|O1O|=0时,则有无数个解,此时全旋转内置式可控弯接头垂直钻进;当0<|O1O|<2e时,解的个数有2个,此时全旋转内置式可控弯接头导向钻进;当|O1O|=2e时,有且仅有1个解,此时全旋转内置式可控弯接头最大造斜钻进;当|O1O|>2e时,不存在。
假设空间中钻头坐标是P(x1,y1,z1),由式(5)中的x1,y1反推可求得环组重心O坐标为

由图3可知

图6工具角调节速度与加速度Fig.6 Regulation speed and acceleration of tool angle

则O点极坐标为

联立式(10)和式(12)可得出内、外偏心环的转角θ2和θ1
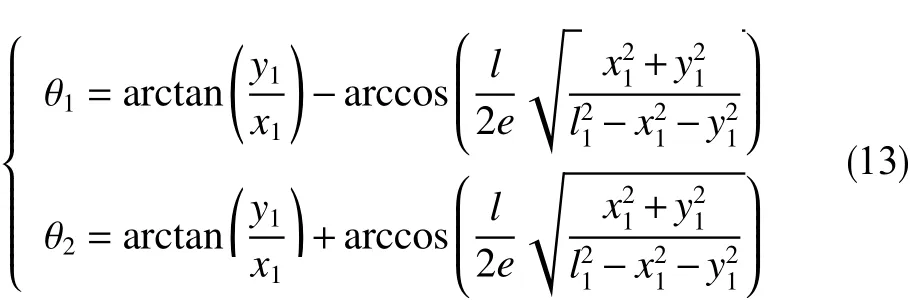
将e=10 mm,l1=253 mm,l=310 mm 代入,由式(13)中该函数的定义域可得

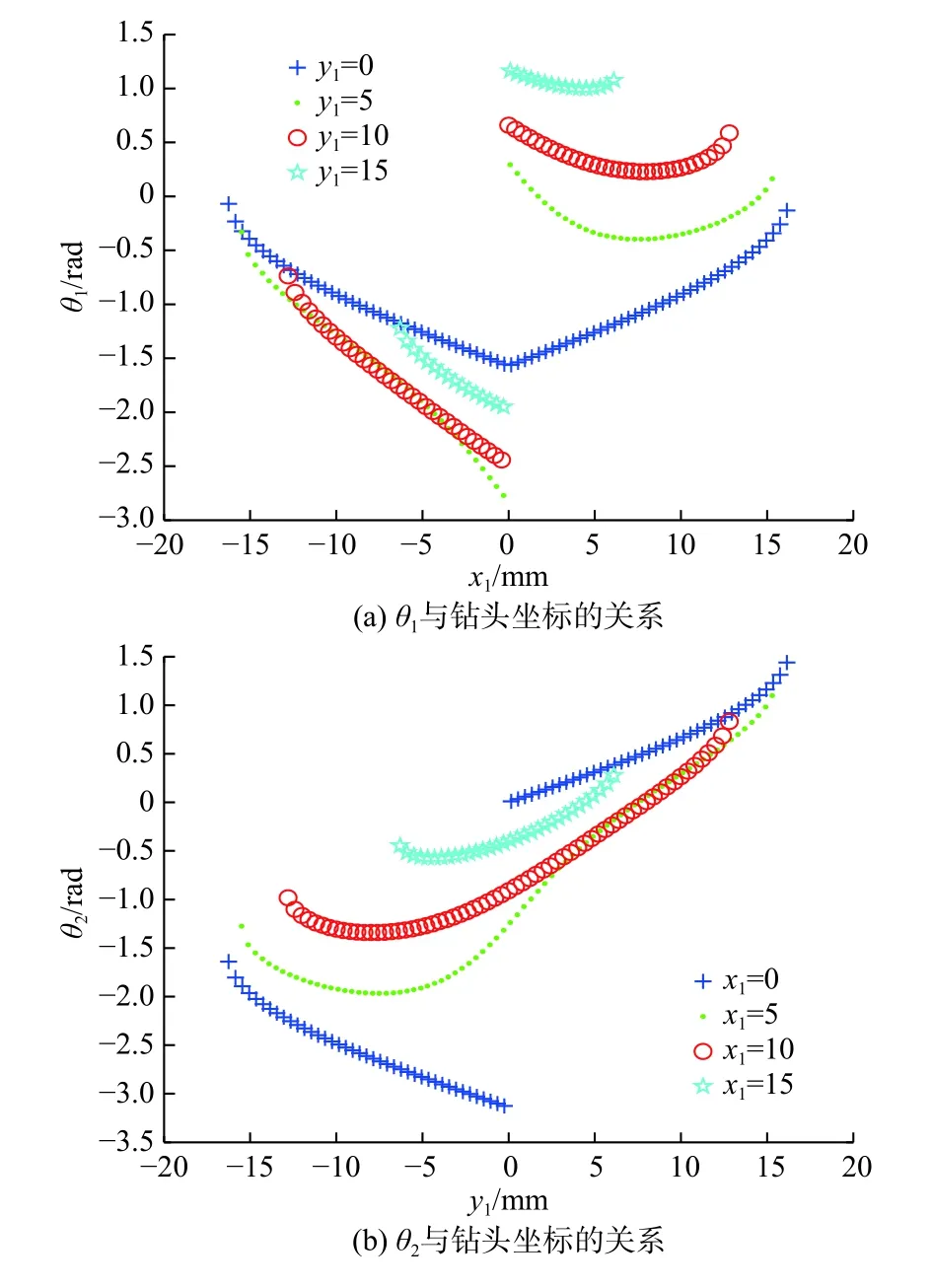
图7内外偏心环伺服电机各自转角与钻头坐标的关系Fig.7 Relationship between bit’s coordinate and the rotation angle of the servomotor with inner/outer eccentric ring
4 运动轨迹仿真
钻井工具在导向模式的自由度为3,故需3个驱动力就可使机构具有确定运动。在SolidWorks Motion 环境下,建立机构的运动学模型和机构组成如图8所示,其中全旋转内置式可控弯接头具有6个构件,1是外偏心环,2是内偏心环,3是轴承,4是导向轴,5是旋转外套,6是底座。给运动学模型中构件1、2和4分别施加一个旋转马达,调节各个马达的转速[21],并且考虑到钻井中,钻头存在钻压与扭矩且不稳定,各轴承存在阻力,因此在仿真过程中添加了阻尼,得到在不同转速情况下钻头处以及偏心环组中心处的轨迹曲线。

图8钻井工具运动学模型和机构组成Fig.8 Kinematics model and mechanism component of drilling tool
由仿真分析结果可知,当内外偏心环角速度相等且不等于旋转外套角速度时,钻井工具处于工具角不变,调节工具面角的状态,钻头和偏心环组中心的轨迹如图9(a)所示,其中的大圆是偏心环组中心的运动轨迹,小圆是钻头的运动轨迹;当内外偏心环角速度均值等于旋转外套角速度且内外偏心环角速度不等时,钻井工具处于工具面角不变,调节工具角的状态,钻头和偏心环组中心的轨迹如图9(b)所示,左边是偏心环组中心的轨迹,右边的是钻头的轨迹,二者都近似为一条直线;当内外偏心环以及旋转外套角速度均相等时,导向机构处于稳斜钻进的状态,此时工具角与工具面角都不再变化,钻头和偏心环组中心的轨迹如图9(c)所示,左边是偏心环组中心的轨迹近似为圆,右边是钻头的轨迹近似为一点,仿真结果与MATLAB理论结果一致。在调节工具面角仿真过程中得到钻头的角位移、轴向位移和角速度如图10所示,可以看出,钻头角位移、轴向位移和角速度曲线变化规律均为简谐运动,周期均为6 s,初始相位均不为0 rad,平衡点分别为83.7°、163 mm和0(°)/s,幅值分别为0.7°、98 mm 和8.9(°)/s,角位移在83°~84.4°之间变化,钻头轴向位移在65~261 mm之间,钻头角速度在−8.9~8.9(°)/s之间变化。
5 结论
(1)根据全旋转内置式可控弯接头的结构特点,建立了该机构的空间机构模型以及运动学模型,并对钻头以及内外偏心环的运动特性进行了分析。
图9不同角速度下钻头的轨迹曲线Fig.9 Bit’s trajectory curve under different angular velocities

图10钻头角位移、轴向位移和角速度的仿真结果Fig.10 Simulation result of bit’s angular displacement,axial displacement and angular velocity
(2)仿真分析结果表明,当内外偏心环角速度相等,且不等于旋转外套角速度时,钻头和偏心环的轨迹是空间上的一个圆;当内外偏心环角速度均值等于旋转外套角速度,且内外偏心环角速度不等时,钻头和偏心环的轨迹都为空间上的一条直线;当内外偏心环以及旋转外套角速度均相等时,钻头的轨迹为空间中的一点,而偏心环的轨迹则为空间上的一个圆;当内外偏心环以及旋转外套角速度均不等时,钻头和偏心环的轨迹为空间上的螺旋线。
(3)基于MATLAB对钻头与偏心环轨迹进行理论仿真,同时运用SolidWorks Motion 对机构进行三维运动仿真,验证了其正确性,通过对导向轴和偏心环的仿真和分析,得到了导向轴和偏心环的速度、加速度、位移等随时间的变化规律,为全旋转内置式导向钻井工具的研究以及实现对钻井系统的最优设计提供参考。
