面向加工中心换刀手技术问题的TRIZ专利规避设计
2020-06-16黄海洋
黄海洋,左 斌
(苏州市职业大学 机电工程学院,江苏 苏州 215104)
换刀手是加工中心的重要组成部分,其作用是实现主轴刀具与刀库刀具的快速自动更换。目前,单臂双爪式换刀手是应用最为广泛的换刀手,在自动换刀过程中,单臂双爪式换刀手要完成抓刀、拔刀、交换刀具位置、插刀和复位等动作,但在使用中发现,换刀过程中普遍存在着刀具夹持不稳、定位不准、掉刀及无法换刀等现象[1-4]。因此,本研究通过TRIZ专利规避创新设计,提出了解决换刀手技术问题的新方案,以期解决单臂双爪式换刀手存在的上述问题。
1 问题分析
1.1 系统分析
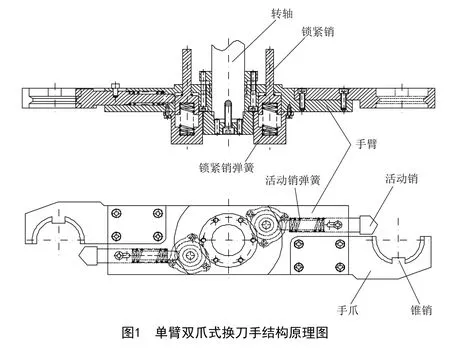
单臂双爪式换刀手结构原理图如图1所示。换刀手换刀时,手臂由待机位置绕转轴旋转至换刀位置;换刀手抓刀时,锥销插入刀柄的凹槽中,两手爪上的锁紧销分别被主轴和刀库上的挡块压下,使活动销能够在刀具的挤压下向内侧移动并在弹簧的作用下顶住刀具;换刀手拔刀时,锁紧销与挡块脱离接触,锁紧销被弹簧弹起,锁紧销顶住活动销使其不能后退,实现对刀具的锁紧,接着换刀手回转180°交换刀具位置;插刀时,换刀手上升,锁紧销分别被主轴和刀库上的挡块压下,使活动销能够在刀具的挤压下向内侧移动并实现松刀。刀具松开后,换刀手复位至待机位置。
从换刀手的功能方面考虑,利用TRIZ中的系统分析方法[5-7]识别换刀手的系统、超系统和子系统,对换刀手组件进行分析,如表1所示。其中,系统和超系统是影响换刀手功能效果的主要因素,分析系统和超系统组件之间的相互作用,形成换刀手组件相互关系矩阵,如表2所示。其中,“+”表明组件之间存在相互作用关系,“-”表明不存在相互作用关系。通过相互关系矩阵可以全面了解系统的组成、功能,以及各组件之间的相互关系,为本研究进一步分析换刀手组件提供基础。
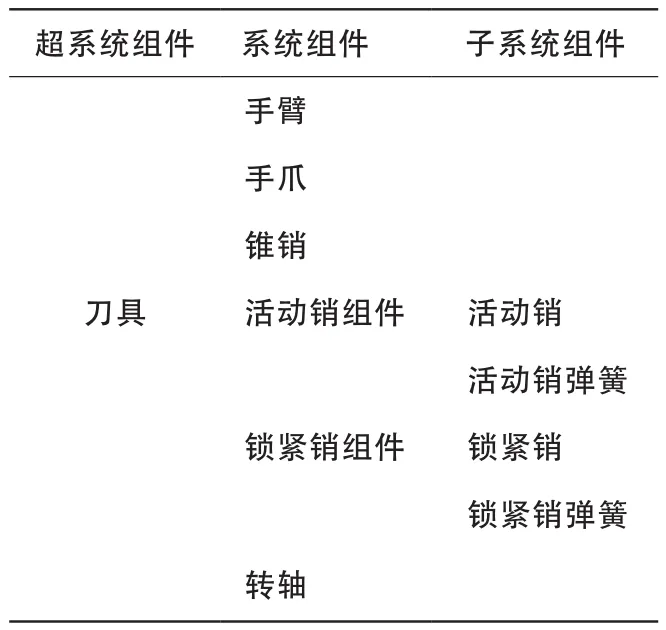
表1 换刀手组件分析

表2 换刀手组件相互关系矩阵
1.2 因果链分析
本研究通过组件分析、相互关系矩阵分析,并结合因果链分析,对造成刀具夹持不稳、定位不准、掉刀及无法换刀等换刀故障的原因进行深入解析。因果链分析如图2所示。通过因果链对造成换刀故障的原因进行逐级分析,可将造成刀具夹持不稳、定位不准、掉刀及无法换刀等换刀故障的主要原因概括如下:
1) 换刀手夹持刀具不稳及掉刀的原因。换刀手对刀具的稳定夹持需要锥销、手爪、活动销组件和锁紧销组件相互配合达到卡紧、锁定。若锥销被磨损或断裂,则锥销无法插入刀柄凹槽中完成定位;若活动销组件和锁紧销组件中的弹簧、销轴等由于断裂、老化、杂质卡阻等原因无法正常工作时,则换刀手会出现夹持刀具不稳,甚至掉刀的现象。
2) 换刀手定位不准的原因。当手爪或手臂产生变形时,换刀点将产生偏差,造成换刀手定位不准。此外,转轴与手臂的连接处松动、偏移或转轴的驱动机构产生较大的运动误差,也会造成换刀手定位不准。
3) 换刀手无法换刀的原因。若活动销弹簧预紧力过度或活动销机械卡阻,则在松刀时活动销无法正常后退,造成刀具卡死无法换刀;若锁紧销弹簧预紧力过度或锁紧销机械卡阻,锁紧销无法被正常按下,活动销始终处于锁紧位置,则也会造成刀具卡死无法换刀。
结合实际工况,将上述原因进行简化,得到造成换刀手故障的根本原因:①由于冲击力的存在,造成销轴变形卡阻、弹簧断裂、手爪或手臂变形、转轴与手臂的连接处松动。②由于磨损及杂质的存在,造成销轴运动卡阻。③由于材料老化,造成销轴断裂、弹簧弹力不足。对于上述换刀手故障的根本原因,可以通过专利规避设计进行解决。
2 专利检索
针对换刀手故障的主要原因,利用专利信息在本领域及先进领域内寻找解决方案[8-9]。专利检索采用了关键词结合IPC分类号的方式,换刀手专利检索要素如表3所示。本研究初步检索得到专利文件788件,经过筛选得到与解决换刀手现存问题最相关的有效专利16件,如表4所示。
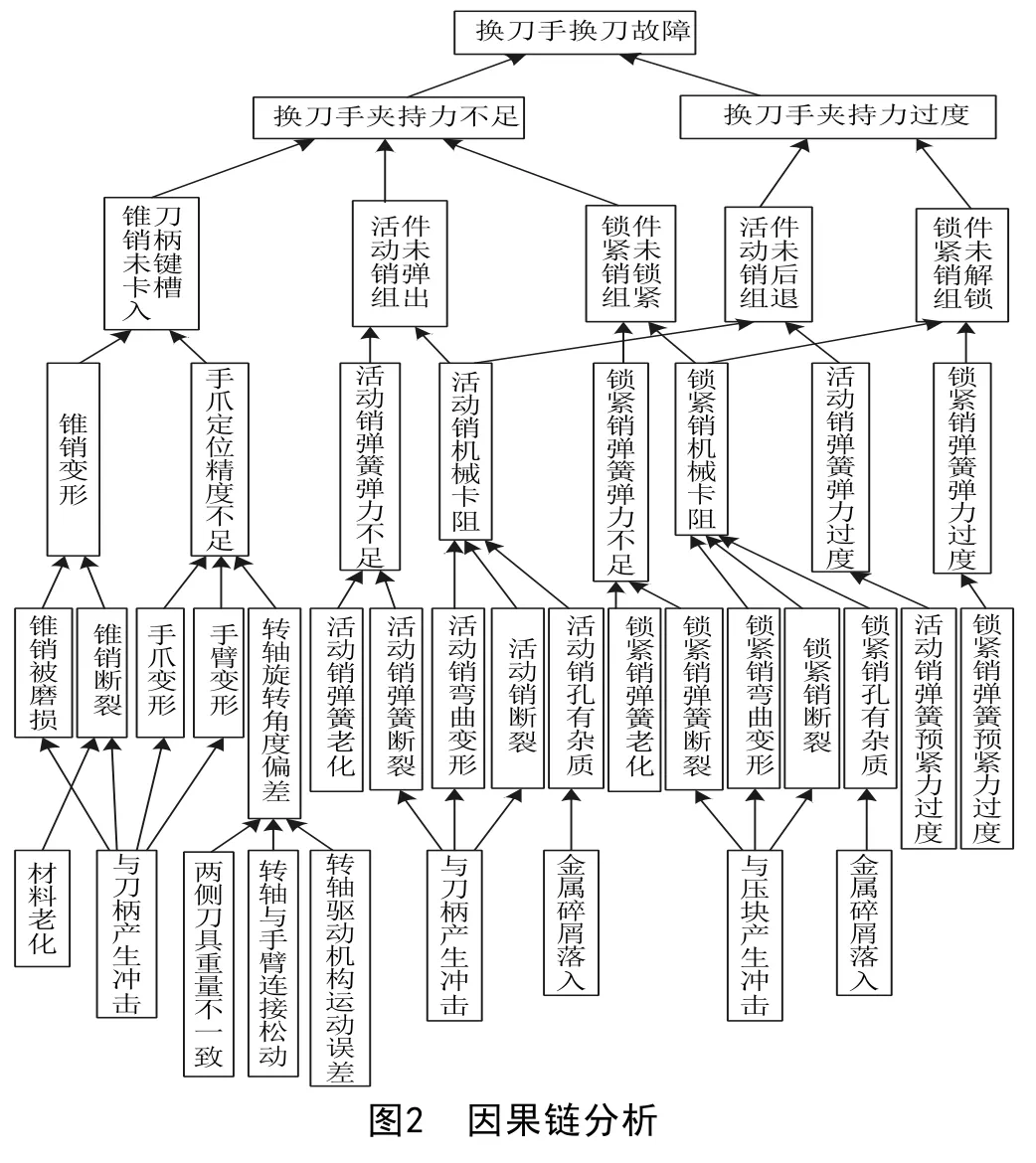

表3 换刀手专利检索要素

表4 解决换刀手现存问题最相关的有效专利
3 专利规避设计
3.1 技术进化分析
以换刀手中的执行装置手爪为关注对象,通过分析上述16件专利的区别技术特征,构建换刀手系统技术进化树[10],技术进化树模型如图3所示。

由图3可知,动态化路线、系统裁剪路线和系统扩展——裁剪路线是换刀手技术发展的重要方向,因此可选取能够解决现有技术问题的专利CN201110297219.9作为被规避专利。
3.2 专利组件分析及功能模型的建立
专利CN201110297219.9公开的换刀手初始方案结构原理图如图4所示。原理图包括换刀臂、夹持座、活塞、压缩弹簧和钢球等部件。其中换刀臂上设置有进气孔,进气孔一端与高压气泵相连,另一端延伸至活塞的底部。夹持座上有若干个钢球活动腔,每个钢球活动腔均含有一个钢球,钢球可在钢球活动腔内左右移动,钢球的直径大于夹持座上钢球活动腔所在的侧壁厚度,因此钢球的左右球面可突出于上述侧壁的两侧。活塞可上下移动,在未通高压气体时,活塞在压缩弹簧的弹力作用下位于最下端,活塞的上端可推动钢球沿钢球活动腔移动。

由图4可知,未换刀时,进气孔不通气,活塞在压缩弹簧的弹力作用下位于最下端;换刀时,刀具进入夹持座的内腔,高压气体经进气孔进入活塞底部,并推动活塞克服压缩弹簧的弹力向上运动,活塞向上运动时,推动钢球向夹持座内腔方向移动,最终使钢球夹持住刀具。
根据本研究对专利CN201110297219.9公开的技术方案中的组件分析,建立其初始方案功能模型如图5所示。由图5可知,高压气体推动活塞,活塞克服压缩弹簧的弹力推动钢球向夹持座内腔方向运动,钢球向内运动后实现对刀具的夹持。该专利的技术方案可以解决抓刀和松刀过程中产生的撞击问题。同时,可以防止刀具和换刀手的磨损、变形、损毁及噪声的产生。此外,刀具由若干个钢球执行抓刀动作,各个钢球间相互独立动作,个别钢球出现故障不会造成整个换刀手无法正常工作,设备安全运行系数高。
该专利所公开的技术方案能够解决现有换刀手销轴机械卡阻和手爪变形造成的换刀故障,但由于已被申请专利,且对现有技术问题未能完全解决,因此为了更加完善地解决现有技术问题,可以利用TRIZ中的功能裁剪方法对该专利做进一步专利规避设计。

3.3 专利规避设计方案
1)方案一:根据TRIZ进化树理论中的物体分割进化路线,在物体层次上,系统组件由分子层次(如气体、液体等)分割至场层次(如电场、磁场等),因此可将功能模型中的高压气体按照物体分割进化路线分割为电磁场,由电磁场替代高压气体完成对活塞的推动功能,方案一功能裁剪及功能模型如图6所示。
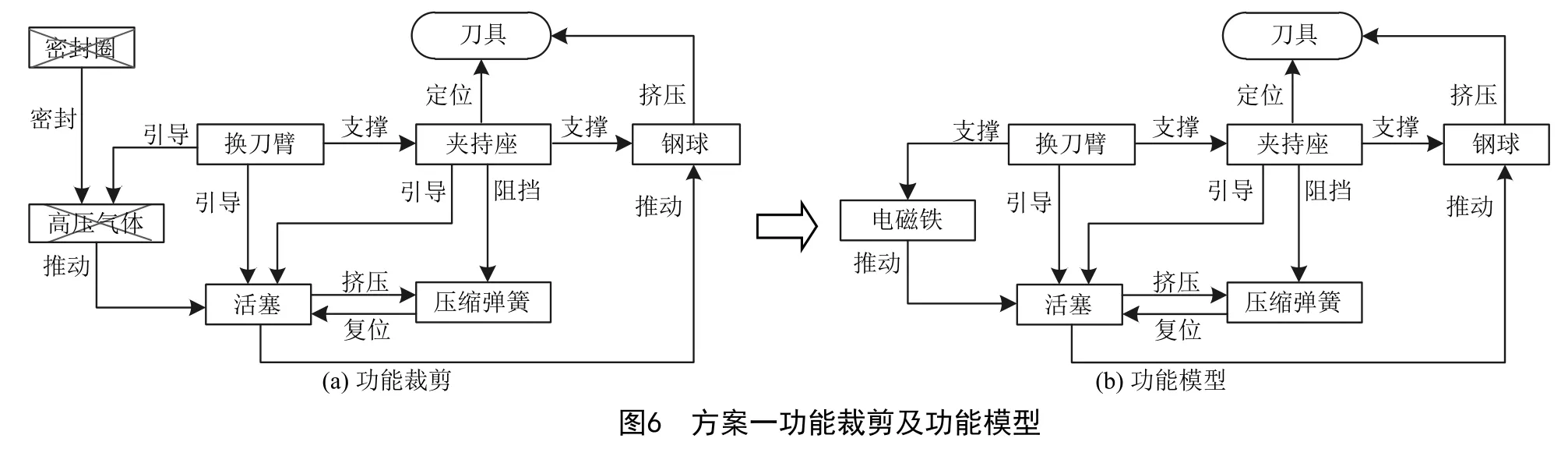
方案一结构原理图如图7所示。由于本方案的系统中已不存在高压气体,无须密封,因此初始方案中的密封圈也可裁剪掉。电磁场可由电磁铁提供,电磁铁以环形的方式固定在活塞的上方。由图7可知,未换刀时,电磁铁不通电不产生磁场,活塞在压缩弹簧的弹力作用下位于最下端;换刀时,刀具进入夹持座的内腔,电磁铁通电产生磁场并推动活塞克服压缩弹簧的弹力向上运动,活塞向上运动时,推动钢球向夹持座内腔方向移动,最终使钢球夹持住刀具。
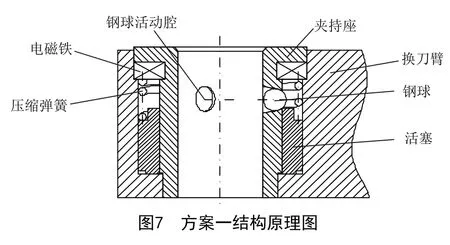
方案一不仅解决了专利CN201110297219.9已解决的技术问题,还避免了由于弹簧老化、断裂等原因造成的无法锁紧刀具及掉刀现象的发生。
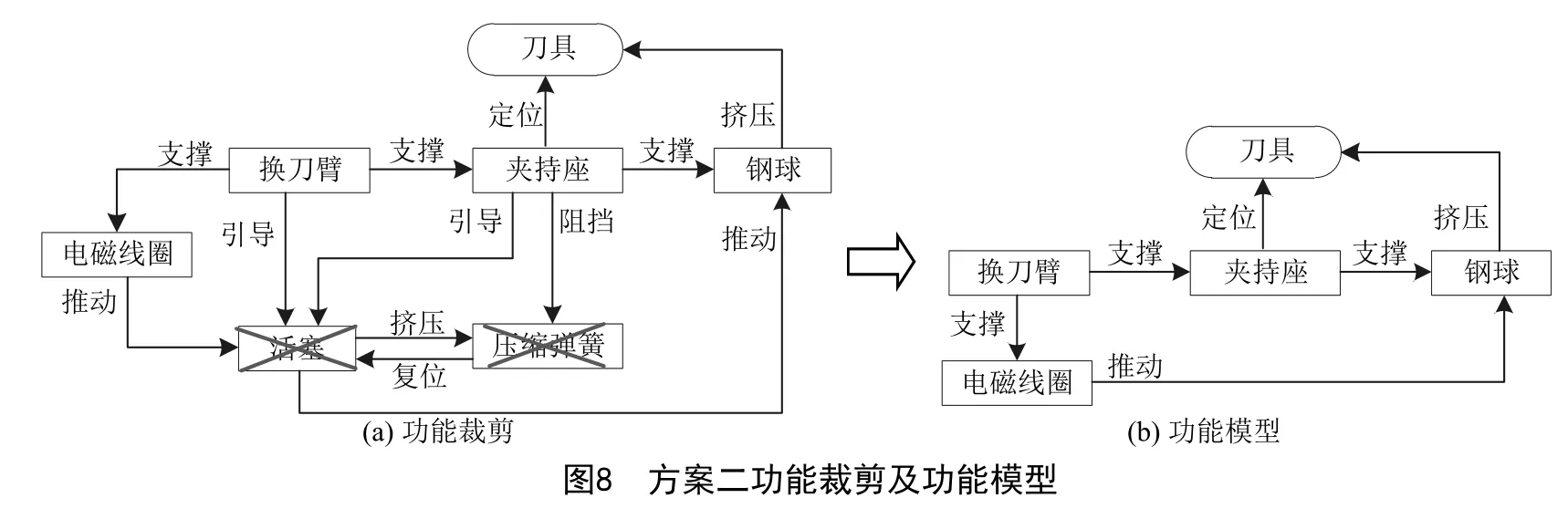
2)方案二:在专利CN201110297219.9及方案一中,钢球为铁磁性材料,其与电磁场可直接相互作用。根据功能裁剪规则,如果能从系统或超系统中找到另一个组件执行有用功能,那么功能载体是可以被裁剪掉的,因此可在方案一的基础上,采用功能裁剪的方法做进一步裁剪。可以将活塞及与活塞相互作用的压缩弹簧裁剪掉,电磁铁产生的磁场直接推动钢球运动并完成夹持刀具的功能。方案二功能裁剪及功能模型如图8所示。方案二结构原理图如图9所示。为了实现电磁场对钢球的作用,电磁铁以环形的方式固定在钢球的周围。钢球的形状改为扁长的椭圆形,且钢球由永磁材料制成,钢球的极性左右设置。当电磁铁通电时,电磁铁产生的磁极方向与钢球的磁极相反,未换刀时,电磁铁不通电不产生磁场,钢球处于自由移动的状态,不提供夹持力;换刀时,刀具进入夹持座的内腔,电磁铁通电产生与钢球极性相反的磁场,该磁场推动钢球向夹持座内腔方向移动,最终使钢球夹持住刀具。
3)方案三:根据功能裁剪规则,如果能从系统或超系统中找到另一个组件执行有用功能,那么功能载体是可以被裁剪掉的。若钢球能被高压气体直接推动,那么可以将活塞裁剪掉,与活塞相互作用的压缩弹簧也可裁剪掉,由此形成方案三。方案三功能裁剪及功能模型如图10所示。


方案三结构原理图如图11所示。由于方案三的系统中已不存在活塞,因此活塞与夹持座、换刀臂之间的密封圈也可裁剪掉。由图11可知,未换刀时进气孔不通气,钢球处于自由移动的状态,不能提供夹持力;换刀时,刀具进入夹持座的内腔,高压气体经进气孔进入储气腔,并推动钢球向夹持座内腔方向移动,最终使钢球夹持住刀具。相较于专利CN201110297219.9,方案三由于裁剪了弹簧和活塞,在解决了现有问题的基础上,结构更简单,故障率更低,实用性更强。

4 专利侵权判定
根据专利相关规定,新方案是否构成专利侵权,需要通过“全面覆盖原则”“等同原则”和“禁止反悔原则”等原则来判定。其中最常用的是“全面覆盖原则”和“等同原则”。上述原则的适用与侵权判定方法如表5所示。
由表5可知,可采取两种专利规避设计方法,使得新的技术方案不侵权:①对原始专利中的某一项或多项技术特征进行替换,且替换的新技术特征与被替换的技术特征存在实质性区别。②对原始专利中的技术特征进行裁剪,使新的技术特征不能全面覆盖原始技术特征。根据专利侵权判定原则和方法,将方案一、二、三的技术特征与被规避专利CN201110297219.9的独立权利中的技术特征相比较,得到设计方案侵权判定结果如表6所示。
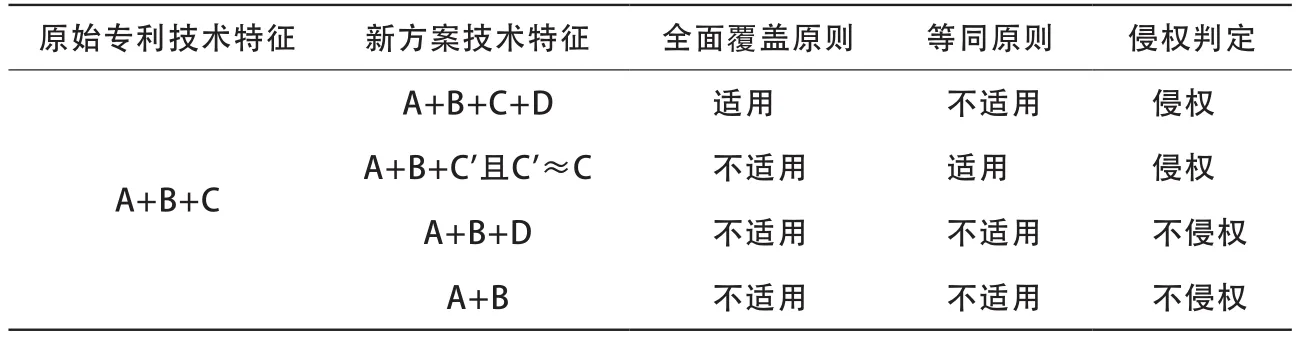
表5 原则的适用与侵权判定方法

表6 设计方案侵权判定结果
由表6可知,专利CN201110297219.9的必要技术特征包括换刀臂、夹持座、活塞、压缩弹簧、钢球和高压气体6项。方案一的技术构成中不包含高压气体,未全覆盖专利CN201110297219.9的全部必要技术特征。方案一新增的技术特征电磁铁与被裁剪掉的高压气体的结构、功能、原理完全不相同,即不存在等同性替换问题。因此,根据“全面覆盖原则”和“等同原则”侵权判定方法,方案一未侵犯专利CN201110297219.9的专利权。同理,方案二、三也未覆盖专利CN201110297219.9的全部必要技术特征,也不存在等同性替换问题,方案二、三也均未侵犯专利CN201110297219.9的专利权。
5 结论
本研究对换刀手存在的问题进行了分析,并结合问题的原因检索、分析了相关专利。利用TRIZ理论中的技术进化理论和功能裁剪方法进行了专利规避设计,最后对规避方案进行了侵权判定分析。由于篇幅所限,文中仅涉及了专利规避设计方法中的功能裁剪策略,其他专利规避策略和方法的应用还要通过相关案例进一步研究和验证。本研究方法具有较强的实用性,可为企业及研究机构利用专利信息规避侵权风险、打破专利壁垒、培育高价值专利提供参考。
