四轮独立驱动电动方程式赛车的驱动控制系统设计
2020-06-15朱小春邓诗猛李浩然
朱小春 邓诗猛 李浩然
摘要:本文主要介绍了2019年中国大学生方程式汽車大赛中深圳职业技术学院参赛队的四轮独立驱动电动方程式赛车的驱动控制系统。具体内容包括系统的组成、整车控制器、轮毂电机驱动控制器、动力电池系统及通讯系统等。目前,这套四轮独立驱动电动方程式赛车的驱动控制系统,已达到中国大学生电动方程式汽车大赛组委会规定的功能和性能要求。
关键词:四轮独立驱动;电动方程式赛车;驱动控制
中图分类号:U462.1文献标识码:A
1引言
中国大学生方程式汽车大赛(简称“中国FSC”)是FSAE国际大学生方程式汽车大赛的分支之一,是一项由高等院校汽车工程或者汽车相关专业在校学生组队参加的汽车设计与制造比赛。各参赛车队按照赛事规则和赛车制造标准,在1年的时间内自行设计和制造出一辆在加速、制动和操控性等方面具有优异表现的小型单座休闲赛车,并且能够成功完成全部或部分赛事环节的比赛。赛事分为静态项目和动态项目。静态项目包括:成本与制造分析、营销报告和赛车设计。而动态项目则包括:单项性能测试(包括直线加速、“8”字绕环和高速避障)和良好的赛道耐久性(包括耐久比赛和效率测试)。
电动赛车是以车载电源为动力,用电机驱动车轮行驶,符合大学生方程式赛车各项竞赛要求的车辆。总体设计涉及嵌入式系统、电力电子、电机控制、整车控制和通讯网络等学科的技术。整车的控制策略是赛车的核心,其中整车驱动控制系统决定了整车的操控与行驶效果,能对比赛结果造成直接影响。因此,驱动控制系统的设计,对赛车而言至关重要。本论文主要介绍深圳职业技术学院代表队参赛作品,四轮独立驱动电动方程式赛车的驱动控制系统。
2四轮独立驱动控制系统介绍
2.1四轮独立驱动控制系统的组成
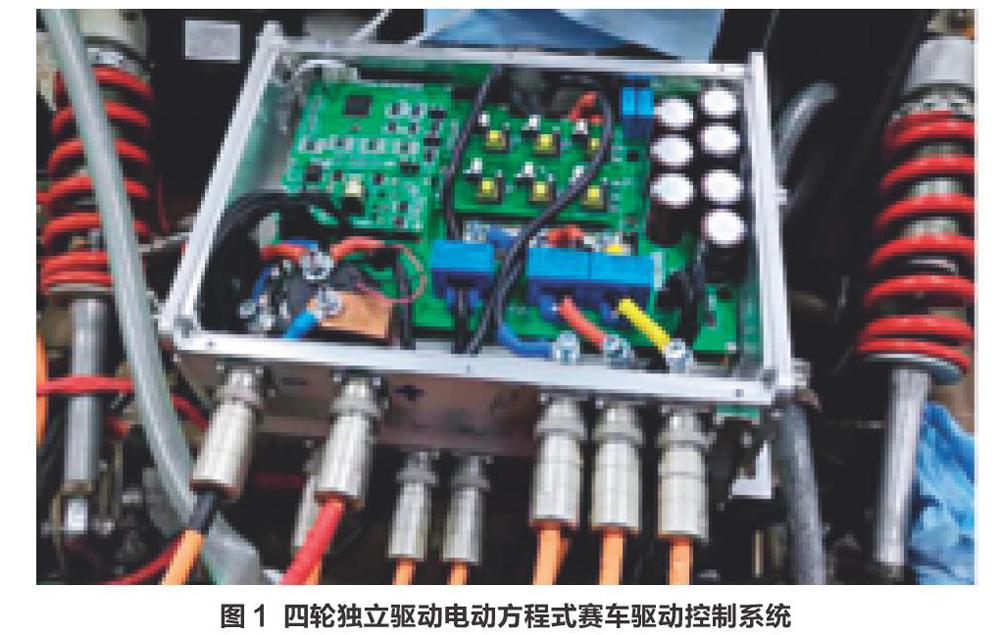
四轮独立驱动电动方程式赛车是利用4个独立控制的电机,分别驱动汽车的4个车轮,省略了离合器、变速器及传动轴等传动环节。这种设计可使传动效率更高,整车重量也得到降低,更便于实现机电一体化。电车驱动控制系统包括:整车控制器、轮毂电机驱动控制器和动力电池系统,所有电子控制单元(ECU)之间的信息交换和控制指令传输,均通过CAN总线实现。大学生电动方程式的驱动控制系统的实物如图1所示。
2.2整车控制器介绍
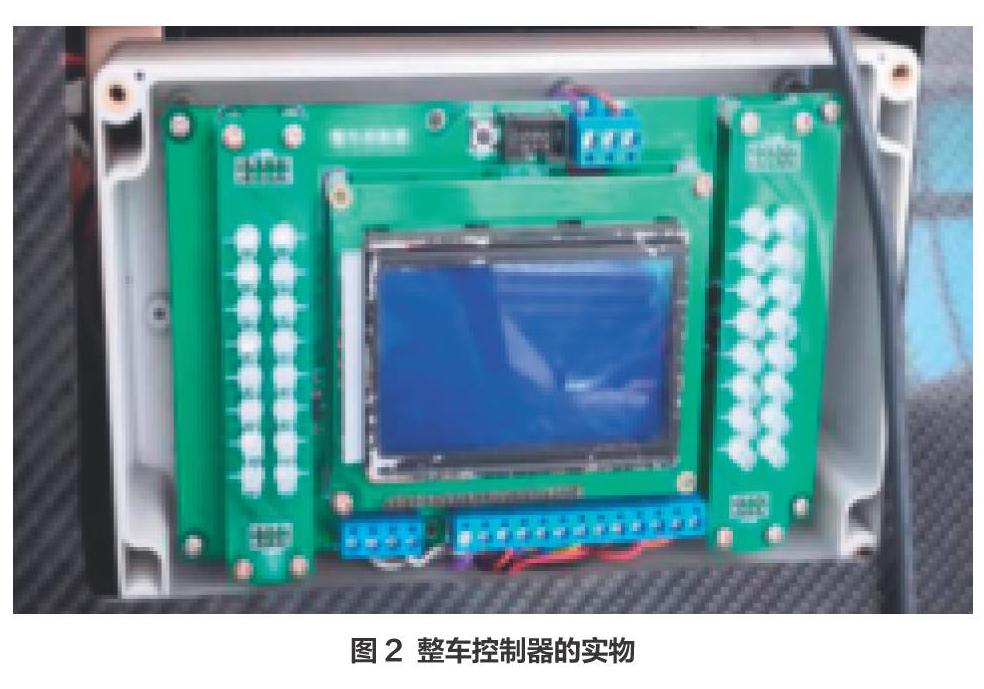
整车控制器是整车的核心控制部件,负责采集加速踏板、制动踏板以及车轮转速等信息。通过CAN总线通讯网络实时协调各个ECU之间的控制策略,使整车满足各种车况的要求。此外,控制系统还需要负责仪表显示的功能(图2)。
2.3轮毂电机驱动控制器
轮毂电机独立驱动车辆的底盘设计思路不同于传统汽车,其悬架系统、传动系统、转向控制系统以及制动能量回收系统等方面直接影响着车辆的稳定性。业界普遍认为,下一代电动汽车将采用以轮毂电机驱动车辆的新型结构。轮毂电机的驱动控制技术,也正是我校电动方程式赛车的核心关键技术。
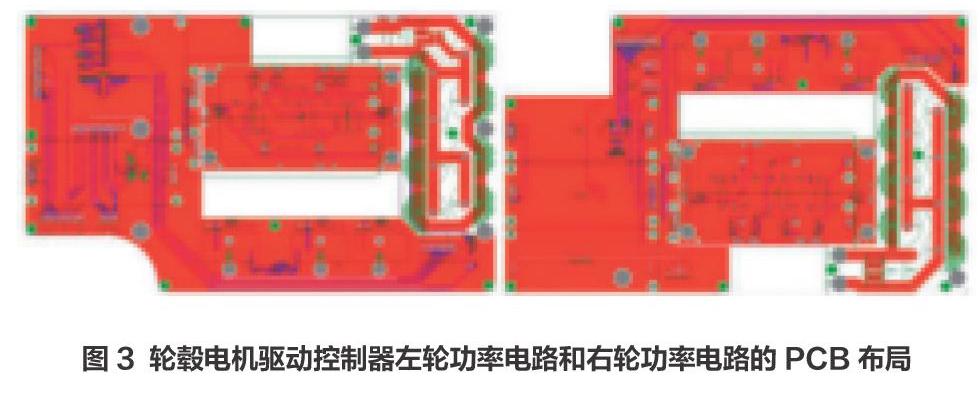
四轮独立驱动电动方程式赛车的2后轮的驱动电机采用直流无刷电机,参数为额定功率10kW、额定转速1200r/min、额定电压144.0V和额定扭矩95N·m。轮毂电机驱动控制的关键技术包括轮毂电机大功率驱动器件的硬件设计、直流无刷轮毂电机适用于大学生方程式汽车工况下的控制算法、驱动控制器对于电流和转速信号采样的抗干扰设计、驱动控制器集中散热设计、驱动控制器的电气绝缘和隔离等方面的设计、过流过热保护设计等。轮毂电机驱动控制器左轮功率电路和右轮功率电路的PCB布局如图3所示。
2.4动力电池介绍
动力电池系统的构成为钴酸锂电池组、电池管理系统和铝散热板冷却系统等。电池组的电芯电压为3.7v,电量为22A·H,组成方式为“40串2并”,规格为148.0V,44A·H和6.512kW·h。动力电池向4个轮毂电机供高压电,电池管理系统工作电压为12.0V。通过外箱上的检测口,可以检测和监控电池的状态,包括充放电电流、电压、自检和故障诊断等。
电池管理系统BMS安装于电池箱体内,BMS的功能有电压检测、电流检测、温度检测、绝缘检测、电池状态估算、CAN通讯、充电均衡和远程监控等。其中,CAN通信功能是通过外部的高速CAN向整车实施提供动力电池各工作状态及管理系统的状态,并通过内部通讯高速CAN接收多个子模块数据并发出控制命令。充电均衡采用被动均衡方式,均衡电流≤100mA,支持充电全程均衡,有效控制单联电池组长时间使用,造成单体电芯储能差异扩张离散的现象。远程监控功能可以提供远程的车辆数据监控服务,使车队工作人员能够实时获取车辆的轨迹、电机控制器数据、BMS电池管理系统数据和整车控制器数据等各项车辆参数。
2.5四轮独立驱动控制系统的总线通讯网络
四轮独立电机驱动电动赛车采用线控技术,每个车轮都配备轮毂驱动电机和电机驱动控制器。系统中共有5个电子控制单元,分别是整车控制器、左前轮驱动控制器、右前轮驱动控制器、左后轮驱动控制器和右后轮驱动控制器(图4)。这5个电控单元之间通过CAN总线网络架构实现数据通讯,从而实现真正意义的线控。
四轮独立驱动电动方程式赛车利用汽车CAN总线技术,实现大学生电动方程式赛车控制系统的模块化设计及控制。利用CAN总线通讯网络进行模块化设计有以下优点。
(1)各模块独立控制,减小开发难度。
(2)各模块间采用总线技术,达到数据资源共享。
(3)使整车控制策略采用高级算法成为可能。
2.6热流散热技术
由于四轮独立驱动电动方程式赛车的功率较大,必须针对大功率电子元器件研究相应的热流散热技术。
通常情况下,散热片大多由铝合金型材制成,根据元器件大小裁切成所需的尺寸,提供自然冷却。然而在特殊情况下,可采用散热风扇或者水冷却的方式,并进行专门的风道热流学设计。本驱动系统针对大学生方程式电车驱动控制器的特点专门设计了水冷却系统(图5)。
3结束语
赛事组委会对车辆设计与制造的要求非常高,参赛车辆在比赛之前还需要通过的严格的电池包密封检查、绝缘检测、车辆状态检测,行驶侧倾检测、喷淋防水检测和制动性能检测等。
经过2019赛季的实践,证明我校设计的四轮独立驱动电动方程式赛车控制系统,已达到大学生电动方程式的功能和性能要求。
