基于大涡模拟的ROV导管推进器梢隙流动数值研究
2020-06-14万德成
周 彬,赵 敏,万德成
(上海交通大学 船舶海洋与建筑工程学院 海洋工程国家重点实验室,上海 200240)
近年来,随着科学技术水平的不断进步,人们越来越多地把目光放到海洋这个巨大的资源和生物的宝库上来。如今,一类新型的深海装备——水下机器人,使得人类的视野能够延伸到极深海域的海底[1]。作为海洋探测和开发的重要手段,水下机器人最早主要用于军事用途,目前在很多民用、科研领域也得到了广泛的应用。水下机器人根据外形、操纵方式等可以分为很多种类[2]。水下无人遥控潜水器(ROV)是一种通过水面遥控进行工作的水下机器人,其在水下运动和定点作业需要动力,水下运动的动力由其搭载的推进器提供,其设计的好坏将会影响到潜器的运动能力和工作效率。近年来,ROV上开始广泛地应用各种导管推进器。根据形状的不同,导管推进器的导管可以分为加速型导管(导管从进口处至盘面处逐渐收窄)和减速型导管(导管从进口处至盘面处逐渐放大)。其中加速型导管可以显著提高较高负载、较低航速下的推进力。深潜器对系泊推力要求比较高,因此深潜器上的推进器一般选用加速型导管推进器[3]。
在中国大洋协会十二五“勘查取样ROV系统”项目支持下,上海交通大学水下工程研究所研制了“海龙三号”ROV。新一代ROV相比上一代ROV要求更高的性能指标,其主要性能指标如表1所示。
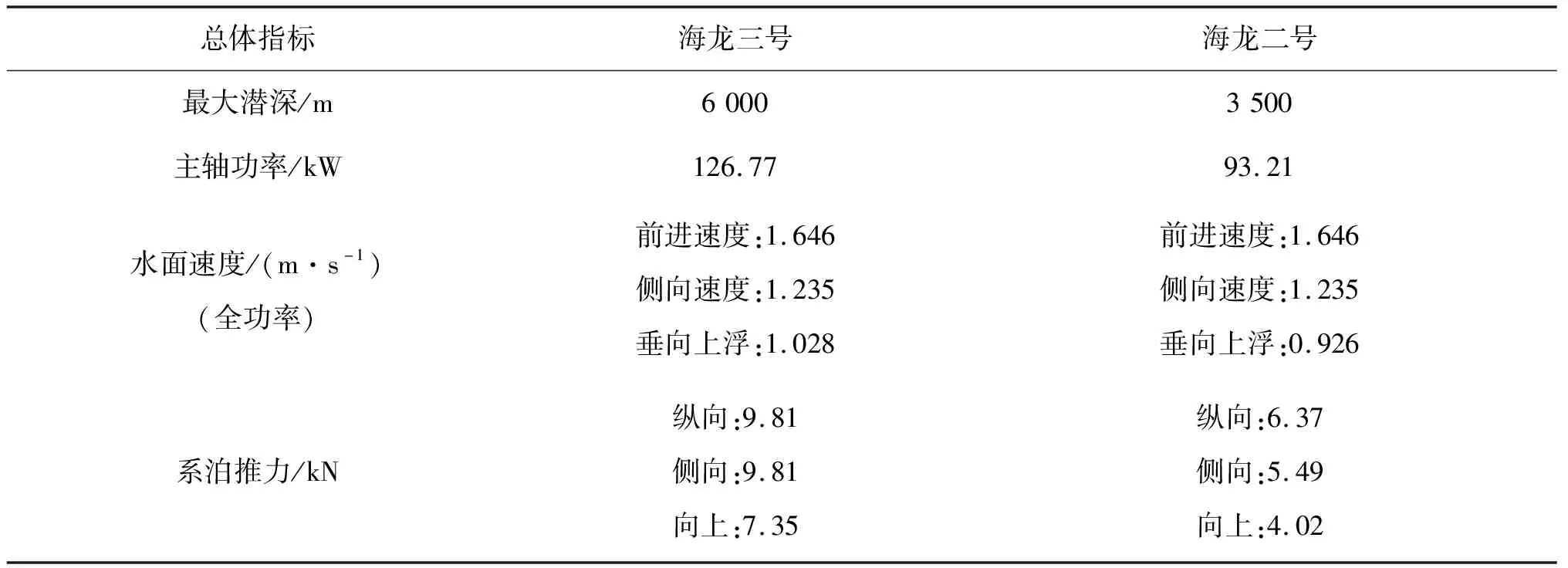
表1 两代ROV主要性能指标
为了达到更高的性能指标,要求推进器的推力具备更高的性能,“海龙三号”ROV采用水平四个矢量布置导管推进器、垂向三个导管推进器的推进系统布置形式,并研制了相应的新型导管推进器,ROV外形和推进器布置如图1。

图1 “海龙三号”ROV外形和推进器布置
导管推进器的导管与叶梢之间存在的微小间隙称为梢隙,梢隙中产生的复杂流动称为梢隙流动(TLV)。梢隙中各种大小的旋涡交替脱落,在涡核低压区,当压力下降到低于饱和蒸气压时,将会发生空化形成空泡。在试验研究中发现,梢隙涡先于桨叶表面开始产生空化[4],梢隙中形成的涡将导致叶域内压力场的压力降低,最终产生空化涡[5],影响螺旋桨的空化性能,进而导致螺旋桨产生震动、噪音等,空化涡使水流产生空化现象,在严重时可能对桨叶和导管内壁产生空蚀破坏[6]。通过研究梢隙涡的形态和形成机理,可以为研究螺旋桨的空化性能提供参考。
螺旋桨在工作时会在桨叶叶梢处产生周期性脱落的涡,导管推进器的形状特殊,与普通的推进器相比,其梢隙中的涡形状比较特殊。螺旋桨的设计和计算发展历程,主要可以分为两部分:1)20世纪50年代以前主要通过试验进行研究,当时Froude和Durand等著名学者在该领域做出了卓越的贡献[7];2)20世纪50年代以后,越来越多地开始使用数值模拟进行计算;90年代以后,随着黏性流理论的发展和技术的进步,计算流体动力学(CFD)逐渐得到发展和应用[8]。
在试验研究中,荷兰船模水池的No.19A+Ka和No.37+Ka系列最为著名,该系列试验的结果被绘制成Bp-δ型设计图谱,如今已被广泛使用。Oweis等[9]将平面粒子成像测速技术(PIV)应用在导管推进器梢隙流场的研究中,发现梢隙流场中瞬时和时均涡流存在显著差异。Taniguchi等[10]研究了螺旋桨转速、盘面比、螺距比、叶梢间隙等因素对Kaplan型调距桨推力的影响。Kim等[11]从对推进器的效率的影响方面进行了研究,认为梢隙尺度在对效率的影响中起着重要的作用——梢隙的宽度越小,导管推进器的效率就越高。在国内,张军等[12]研究了不同进速下的导管桨内流场,采用PIV技术研究了流场的特性。
数值模拟方面,有许多学者使用各种方法,结合不同的模型,对梢隙流动的形态和特性进行了细致的研究。Hong等[13]使用FLUENT软件,研究了推进器桨叶周围环流的分布,欧礼坚等[14]在不同进速下对导管螺旋桨进行了模拟,研究了黏性流场中的推力系数和转矩系数。沈海云[15]使用FLUENT软件对全速正车、全速倒车等工况下的流场进行了分析。马艳等[16]使用多块混合性网格和滑移网格技术对某导管推进器进行了数值模拟,得出了湍流参数采用公式计算比经验计算更准确的结论,认为在现在的研究阶段,两方程模型相对来说更为准确。胡健等[17]使用多重参考系研究了JD7704+Ka4-55型导管桨的水动力性能,发现在来流为斜流的条件下,导管能够显著减小推进器工作时产生的推力脉动和扭矩脉动。Uto[18]釆用了雷诺平均(RANS)和Baldwin-Lomax的组合方法,模拟了螺旋桨的湍流运动。周军伟等[19]分析了在敞水中梢泄露涡对导管桨空化性能和推力造成的影响。Wu等[20]在对导管螺旋桨的梢隙泄涡进行研究时,对比了RANS和LES两种方法,认为LES对能流通量模拟效果更好,更适合该问题的研究。总而言之,CFD方法已经作为一种成熟的研究方法开始促进导管推进器的研究。
针对“海龙三号”ROV导管推进器梢隙涡的形成机理以及不同进速下的涡形态开展了数值模拟研究。基于大涡模拟对导管推进器的梢隙流动进行了数值研究,得到了较为准确的水动力性能计算结果。通过对比不同类型网格对梢隙涡的计算结果,发现切割体网格能够更好地捕捉到泄涡的细节,并结合梢隙流场的构成原理分析了泄涡发展的过程,此外还研究了不同进速下泄涡的形态差异。
1 数值计算方法
梢隙流动发生在桨梢外部,紧贴导管内壁,受到导管的强烈影响,流体黏性的作用在其中起到了重要作用,势流方法忽略了流体黏性,用其研究梢隙流动并不合理。近年来,CFD方法也开始广泛应用于导管推进器的研究中。CFD方法主要可以分为三种[21]:直接数值模拟(DNS)、大涡模拟(LES)以及雷诺平均(RANS)方法。其中,DNS方法在所有计算方法中具有最高的准确性,甚至可以得到试验也无法测得的物理量。但是直接数值模拟对网格和计算资源的要求也是巨大的,往往要求极大的网格量和极小的时间离散尺度,在实际工程问题中难以应用。RANS方法对控制方程进行建模,不需要计算各种尺度的脉动,对空间的分辨率即网格密度要求比直接数值模拟低得多,可以在保证计算结果准确的前提下大大减少计算量,但是也导致一些随机涡的信息丢失。而LES方法将流动划分为大小不同尺度的量,将大尺度的涡直接模拟出来,对于滤去的小涡,通过引入附加应力项加以弥补[22],本质上是一种简化的DNS方法。导管推进器的梢隙流动非常复杂,不同形状、不同尺度的涡交错出现,结合以往学者的研究结果,使用LES方法进行研究更为适合。
1.1 LES求解模型
在LES计算中需要经过滤波过程,首先需要设定一个临界量,以该临界量为界,流动被划分为大、小两种尺度。通过这样的处理,保留了对流场影响较大的大涡,保证了计算的准确性;忽略了对流场影响较小却广泛存在的小涡,使得LES能够用较少的计算资源完成计算。具体来说,就是在N-S方程的基础上进行处理,滤去比临界量更小的小尺度涡,保留比临界值更大的大尺度涡。对于滤去的小尺度涡通过附加应力项替代其影响,而对于保留下来的大尺度涡进行直接求解,从而得到LES方法需要满足的控制方程[23]。
过滤临界量定义为:
(1)
其中,D为流体区域,G为滤波函数,其表达式为:
(2)
其中,V为控制体所占几何空间的大小。滤波中使用的临界值由滤波函数G决定,则式(1)可以变形为:
(3)
使用上述方法处理N-S方程,可以得到LES方法所满足的控制方程:
(4)
其中,σij为分子黏性引起的应力张量,定义为:
(5)

(6)
公式(1)~(6)中带有上划线的,就是经过滤波函数处理后的量。
1.2 导管推进器模型
文中研究的导管推进器模型,为勘查作业型无人缆控潜水器“海龙三号”所搭载的推进器,该型推进器相比上一代ROV推进器进行了较大改进。该新型推进器经过水池敞水试验和4 500 m级海上试验,表现出了优良的性能。两代推进器的几何模型如图2所示。
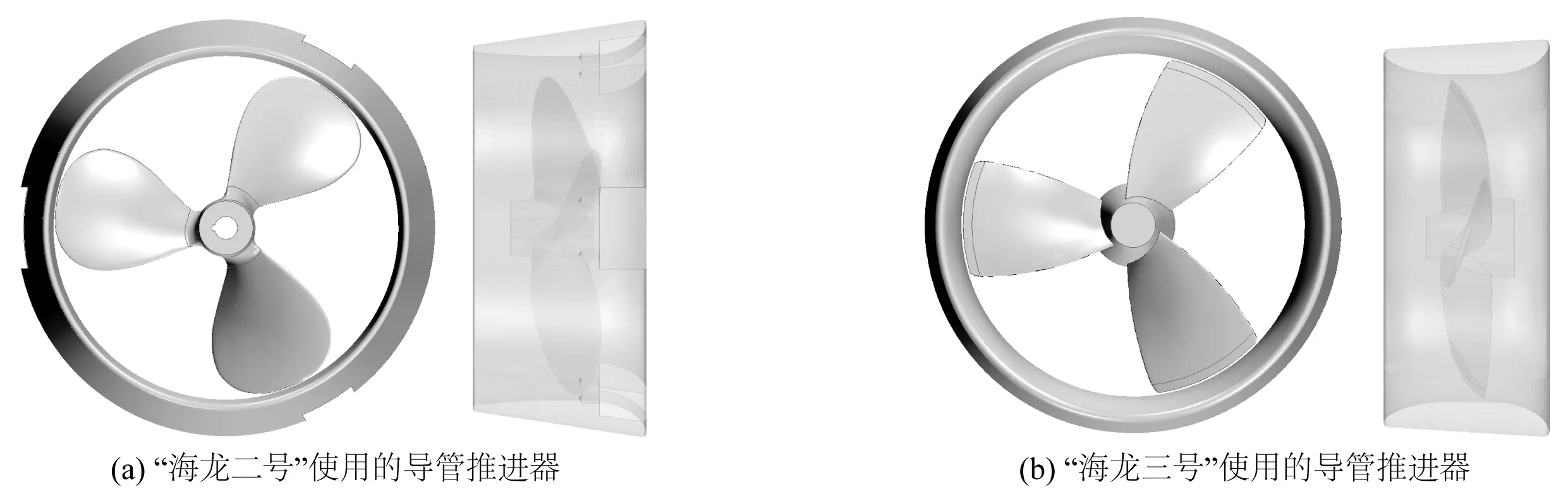
图2 导管推进器几何模型
“海龙三号”导管推进器的桨叶参数如表2所示。

表2 桨叶参数
1.3 网格划分
考虑推进器所处工况为系泊状态,以及进速变化的工作条件,并考虑计算准确性和计算资源的要求。计算域设置为柱状,计算域径向直径8D,桨前距离12.5D,桨后距离12.5D,其中D表示导管螺旋桨的直径。
由于计算应用了滑移网格,因此将整体计算域划分为两个计算域,包含螺旋桨桨叶部分的旋转域,以及包含外部导管部分的外部静止域。两个域之间进行信息传递需要通过一组重叠的界面,即交界面(interface)。对于旋转域,为了研究网格类型对计算的影响,分别采用Star-CCM+中的多面体网格和切割体网格进行两类不同的网格划分,多面体网格的网格单元是面数不定的多面体,具有较好的物面贴合能力,但正交性较差;切割体网格的网格单元均为正六面体,具有较好的正交性,但物面贴合能力和网格过渡能力较差。外部静止域几何形状相对简单,使用切割体网格进行网格划分,这样划分既可以保证网格的质量,又可以节省计算资源。为了观察梢隙及梢隙涡泄出区域的详细流场情况,对梢隙和梢隙涡泄出区域进行了区域网格加密,并在加密区和外部区域之间进行了网格过渡。物面采用15层片状网格对边界层进行模拟,该方法要求紧贴在壁面上第一层网格的高度要满足Y+(第一层网格距壁面高度无因次量)约束,一般Y+的值应该介于0~1之间,本模型选用的Y+为0.3,符合计算要求。计算区域网格如图3、图4所示,其中内部旋转域网格数约为1 253×104左右,外部静止区域网格数约为293×104。
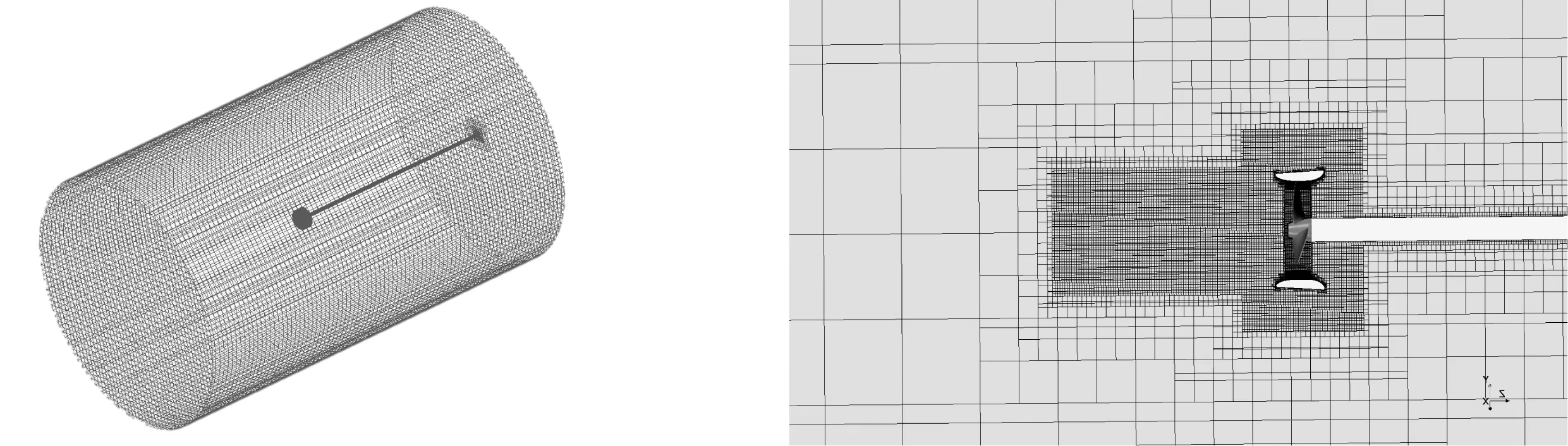
图3 计算域网格
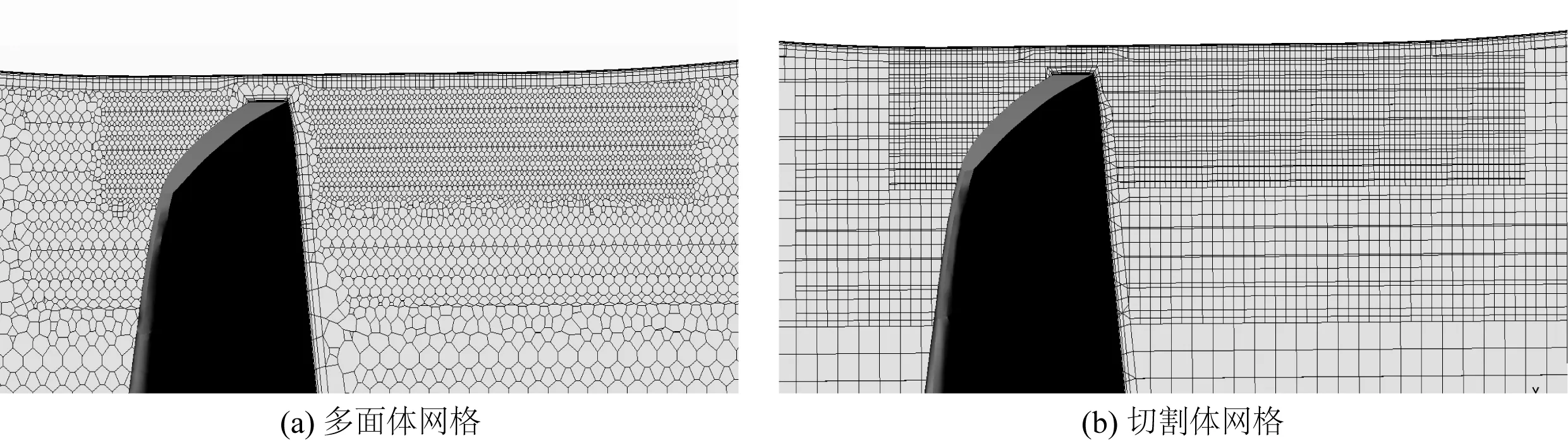
图4 桨梢和梢隙中的网格
1.4 边界条件
使用Star-CCM+软件进行计算,边界条件设置如下:
1)入口(inlet)条件:在计算系泊工况时设置为压力出口(即保持恒定压力的开放边界),可以使流域保持开放;在计算有进速的工况时,设进口条件为速度进口,可以保证稳定的进流速度;
2)出口(outlet)条件:压力出口;
3)固体表面(导管、桨叶、毂帽等):均为不可滑移壁面(no-slip wall)。
2 收敛性分析
为了验证计算的收敛性,需要对模拟进行收敛性分析。收敛性分析需要使用至少三组方案进行对比,在保持其他参数不变的基础上仅对一个参数进行调整。通过设置三组不同长度的时间步长进行收敛性分析,并将计算结果与试验结果进行对比。设定来流速度为U=0 m/s,桨叶转速r=600 r/min。随着时间步长的的缩短,计算值应趋于收敛。
要进行三组计算结果的收敛性验证,ITTC[24]建议的收敛比率RG被定义为:
RG=ε32/ε21
(6)
其中,ε21=S2-S1,ε32=S3-S2。S1、S2、S3分别表示长时间步长、中等时间步长、短时间步长的模拟结果。基于RG,离散化收敛的状态可以分类为:1)单调收敛,0
将推力和扭矩计算结果进行处理,根据式(6)计算得到RG,计算结果如表3所示。

表3 时间步长收敛性验证
两个指标的收敛比率均小于1,且位于单调收敛的数值区间内,证明随着时间步长的缩短,计算值收敛。时间步长小于0.001 s后,再减小时间步长对提高计算精度的贡献可以忽略,因此文中采用0.001 s时间步长的计算结果进行分析。
3 计算结果与分析
3.1 计算值与试验值对比
为了保证数值计算的准确性,还需要将数值计算结果与实物试验的结果进行对比验证。该型推进器在拖曳水池完成了敞水试验,转速保持600 r/min不变,通过改变来流速度调整进速系数。图5是对两种不同类型网格对三个不同进速系数工况的水动力计算结果(推力系数KT和扭矩系数KQ)。由图5可以看出,两种网格都可以较准确地预报导管桨的水动力性能。
3.2 两类计算网格对梢隙流动模拟的对比
图6是两类网格计算的梢隙涡和泄涡,通过对比两类网格同一时刻模拟的结果,选择模拟更精细的模型进行后续分析。时间选择第0.8 s时刻,等值面采用Q准则(涡量等势面)绘制。
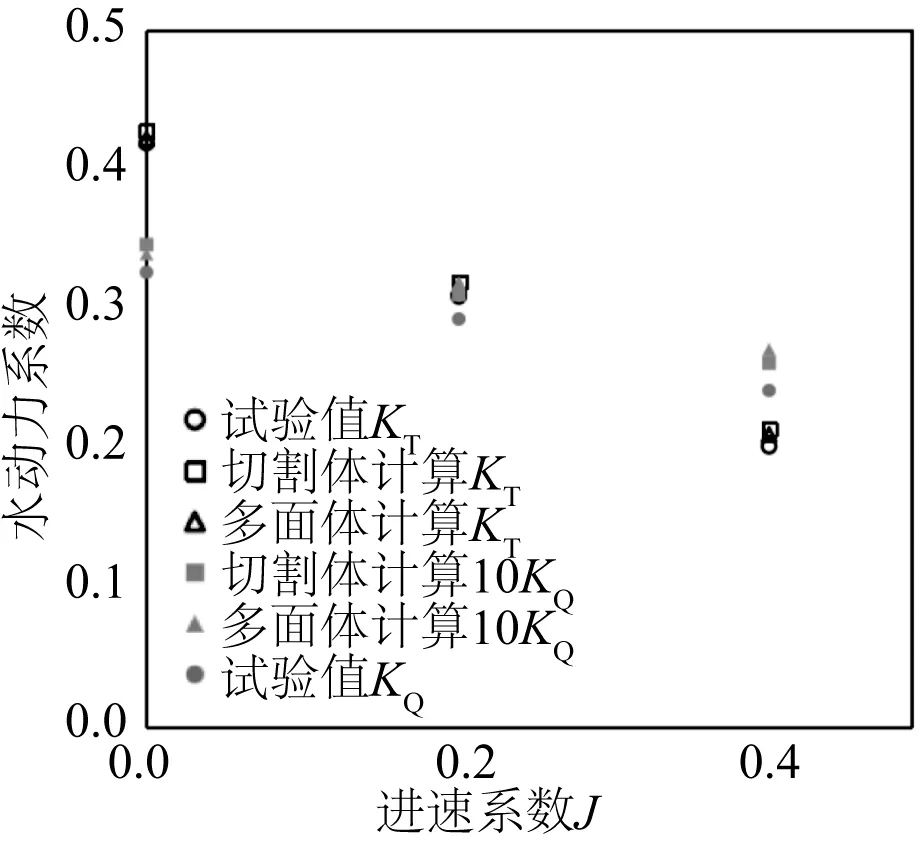
图5 水动力计算结果
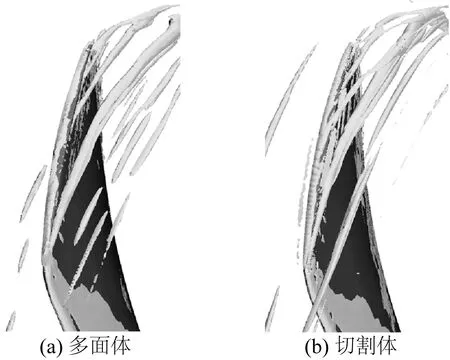
图6 0.8 s时两类网格计算的梢隙涡对比(Q=5×105 s2)
由图6可以看出,附着在桨叶上的涡主要存在于桨叶的导边、桨梢的压力面侧和吸力面侧脱落区。泄涡主要由两部分组成:脱落于约4/5弦长处的一条最主要的涡(主泄涡),以及流体进入梢隙时分离形成的涡(随机小涡)。主泄涡延伸长度比较远,可以延伸至三叶桨的下一个桨叶范围内,而随机小涡延伸长度比较近,泄出后很快耗散掉,无法像主泄涡一样延伸至较远的距离。对于这两种形态的泄涡,文中的数值模型都能够较好地模拟。但是多面体网格对于泄出梢隙的涡模拟的连续性较差,切割体网格能够更好地捕捉泄出梢隙的随机小涡,主要是由于切割体网格均是正交的六面体网格,正交性好,而多面体网格正交性差,所以模拟出的涡的连续性较差。根据以上的分析结论,发现切割体网格相比多面体网格,对梢隙涡以及泄出区域泄涡的模拟更加全面、精细,得到的涡结构和流场信息更加丰富,更适用于研究导管推进器梢隙流动特性。因此使用切割体网格计算结果进行流场分析。
3.3 梢隙泄涡形成机理
系泊工况下,沿桨叶弦长方向延伸的不同位置处压力分布如图7所示。从图7中可以看出,驱动导管推进器梢隙流动形成的原因,主要是吸力面与压力面之间的压差。从桨梢临近导边位置泄出了一条较为粗壮的泄涡,若以桨叶随边为弦长起始处,约在4/5弦长处涡核的压力降到最低,从而涡从桨叶上脱落,脱落的涡开始向桨叶后方延伸。在桨叶后方,吸力面与压力面形成了压力变化剧烈的交界区域,脱落的涡进入这个区域后与压力剧烈变化的流体相混合。图7中所示的低压区位置与图6所示主泄涡位置一致。
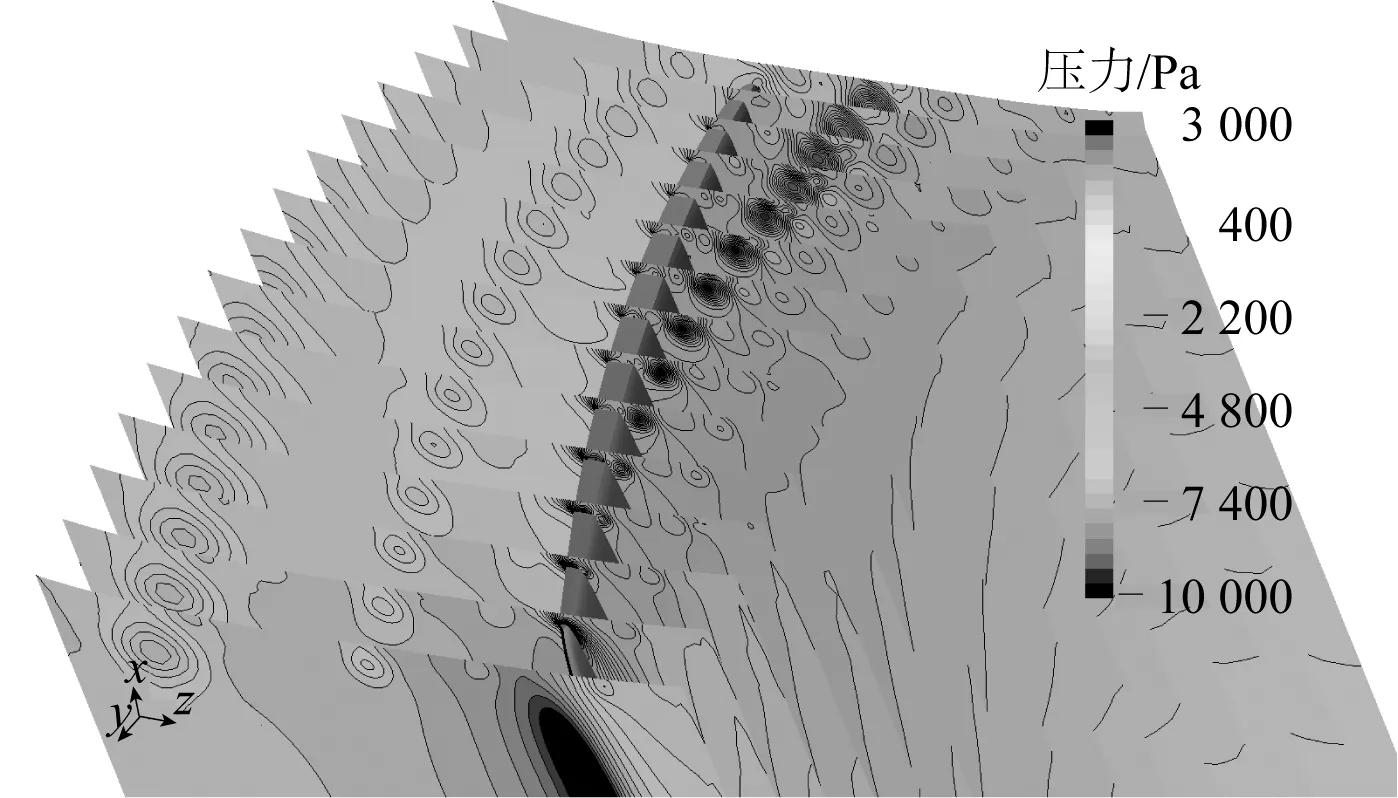
图7 0.8 s时沿桨叶弦长方向压力分布
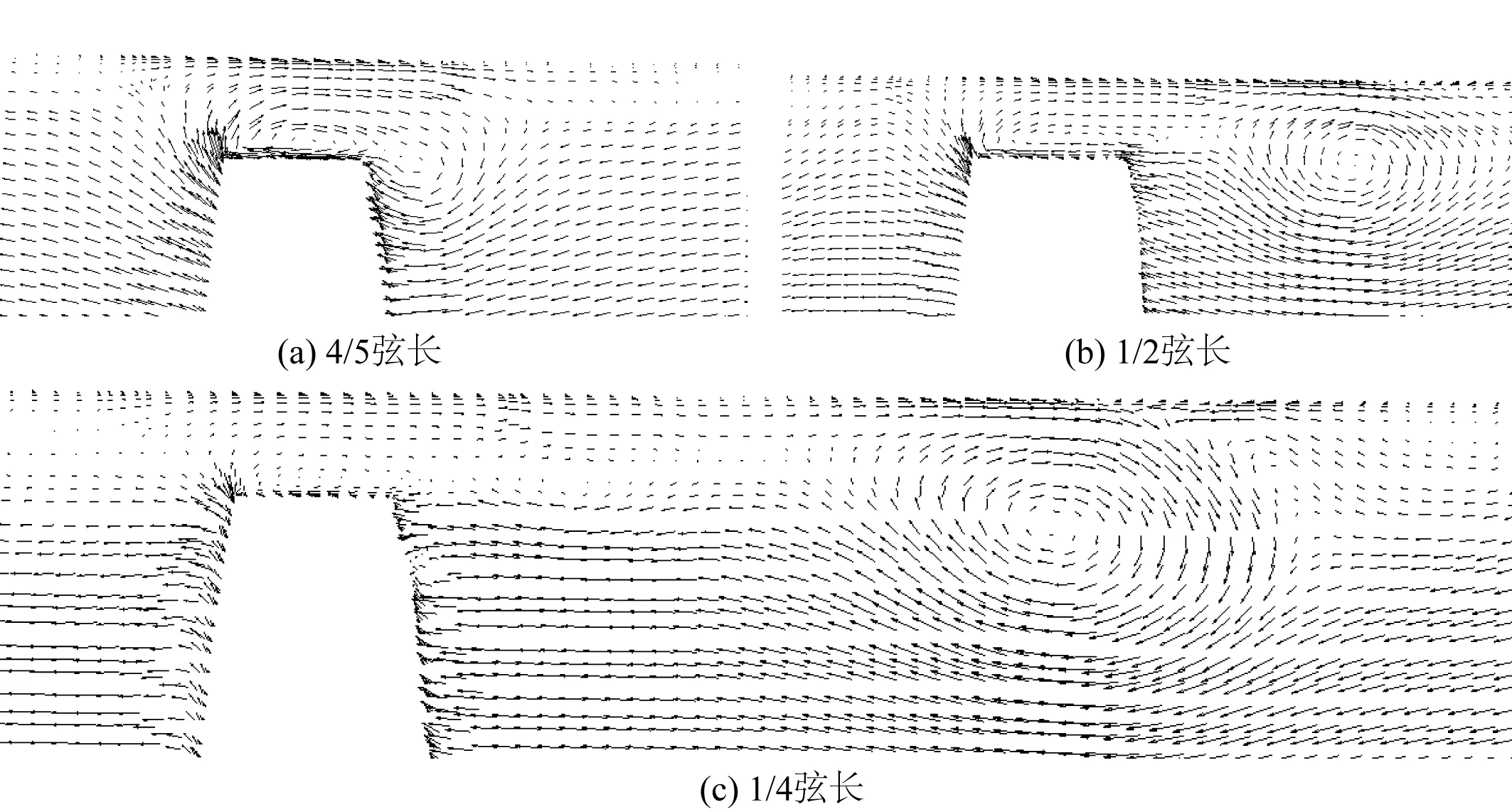
图8 0.8 s时梢隙速度矢量图
由图8所示,三个典型弦长处(4/5弦长:泄涡开始卷起;1/2弦长:泄涡已脱落;1/4弦长:泄涡逐渐远离)的速度矢量图揭示了泄涡起始时,梢隙内部及其前部区域的流动机理,以及涡脱离梢隙后逐渐向桨叶后方延伸的过程。桨叶两侧强烈的压差,驱使流体通过梢隙,从高压区进入低压区,压差构成了泄涡形成的首要驱动力。梢隙前方附近的流体在压力侧高压的驱动下进入梢隙,进入梢隙后由于流域形状突然改变,致使流体发生分离,在梢隙中卷起了分离涡。进一步地,流体从梢隙中流出后进入吸力面侧,开始与该处的来流相互作用,形成了桨叶前方较长的泄涡,随着运动的流体被输运到远离桨叶的后方。
3.4 进速对泄涡形态的影响
基于LES计算的结果,绘制了0.8 s时不同进速下的梢隙泄涡等值面图,如图9所示。图9中圆圈所示位置为主泄涡发生位置(以泄涡开始脱离桨梢处为主泄涡发生位置);梢隙周围的涡管沿周向延伸,直至最后耗散,受进速等因素的影响,这些涡在轴向上呈现不同的分布,图中右侧括号所示为梢隙周围涡管沿轴向分布的范围。L表示从桨叶随边至导边的距离,D为螺旋桨直径。由图可以看出,当在低进速时,梢隙周围涡管沿轴向分布范围较大,而增加进速时,梢隙周围涡管沿轴向分布范围明显减小,对比J=0和J=0.406 7两个工况,涡管轴向分布范围减少了33%。此外,随着进速增大,在J=0时主泄涡发生位置约在弦长4/5处,而J=0.406 7时发生位置约在弦长3/5处,说明主泄涡发生的位置随着进速增大发生了延后,而泄涡泄出后发展、延伸的方式是相同的。

图9 0.8 s时不同进速系数下梢隙流动的涡形态
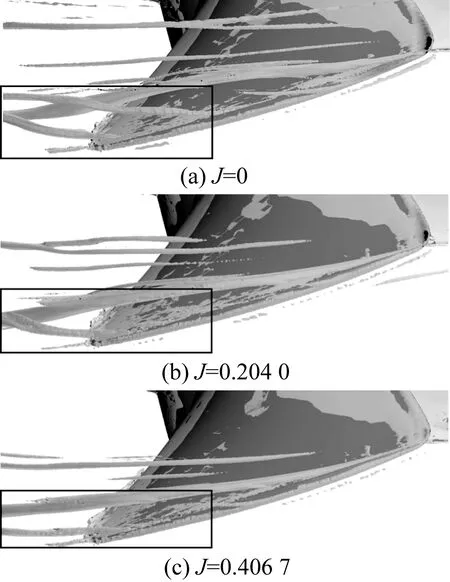
图10 0.8 s时不同进速系数下泄出小涡的形态
图10表现的是不同进速下泄出小涡的形态,图中方框标出了泄出的小涡,这些涡并非起始于贴近导边的位置,而是从接近随边的位置或桨梢中部位置起始,其产生机理与主泄涡类似,但其形态受进速等因素的影响而有所不同。从图中可以看出,随着进速的增大,泄出的小涡形态发生了较大的变化。从一开始可以延伸至与主泄涡合并,变化至逐渐脱离主泄涡的影响。结合主泄涡的变化,可以看出低进速下泄涡现象比较明显,泄出的涡延伸距离较长,数量也比较多,而高进速下泄涡延伸长度较短,数量也比较少。此外,结合图9也可以看出,增加进速时,梢隙周围涡管沿轴向分布范围明显减小,这与图9所展现出来的结论是一致的。
4 结 语
基于LES方法,开展了“海龙三号”ROV导管推进器系泊工况梢隙流动的数值研究,通过进行收敛性分析,并将计算值与试验值进行对比,验证了模型的计算准确性。此外,还对不同进速下梢隙涡的形态进行了分析,主要得出如下结论:
1)在同样的网格尺寸和网格分布下,两种非结构网格都可以较为准确地计算推进器的水动力性能,但切割体网格相比多面体网格能更好地捕捉梢隙泄涡的结构;
2)导管推进器梢隙存在的涡主要是压力面流体进入梢隙形成的分离涡,此外在吸力面梢隙附近区域还存在脱落的泄涡,叶面两侧强烈的压差是梢隙涡形成的首要驱动力,泄涡主要由一条脱落于约4/5弦长的主泄涡以及流体进入梢隙时分离形成的随机小涡组成;
3)系泊状态下,主泄涡发生的位置约在4/5弦长处,随着进速系数增大,梢隙周向的涡管轴向分布范围减小,主泄涡发生位置延后,泄出涡的长度和数量都有所减少。
由于ROV上的推进器在工作时往往是多个桨同时运行,考虑到在极近的距离下各个桨之间存在明显的干扰,对ROV工作时推进性能的研究不能局限于单桨研究,未来还有待于开展多桨干扰方面的相关研究。
