阿克曼转向模型的改进及其电子差速控制仿真
2020-06-11薛昊渊连晋毅王嘉仑任艳强
薛昊渊 连晋毅 王嘉仑 任艳强


摘 要:分布式驅动电动汽车作为纯电动汽车未来主要的发展方向,对其轮毂电机的转速控制和转向性能的研究是当前的热点之一。文章在阿克曼转向原理的基础上,提出一种改进的阿克曼转向模型,并在MATLAB/Simulink中搭建仿真模型,对前轮转速进行控制。将改进前后两种模型得到的车速结果与CarSim中相同工况下得到的仿真结果进行比较,发现改进后的转向模型在车辆中低速运行时,前轮转速能很好的满足实际转向要求、实现车辆的平稳转向。这说明,笔者提出的基于阿克曼转向原理的改进模型对研究分布式驱动电动汽车的转向控制策略有一定的借鉴意义和参考价值。
关键词:阿克曼转向模型;改进;电子差速;建模仿真
中图分类号:TP391.9 文献标识码:A 文章编号:1671-7988(2020)10-118-04
Electronic Differential Control Simulation Based on Improved AckermanSteering Model*
Xue Haoyuan, Lian Jinyi*, Wang Jialun, Ren Yanqiang
( Taiyuan University of Science and Technology, Shanxi Taiyuan 030024 )
Abstract: As the main development direction of pure electric vehicles in the future, distributed drive electric vehicles, the research on the speed control and steering performance of their hub motors is an essential research hotspot. Based on the Ackerman steering principle, this paper proposes an improved Ackerman steering model, and builds a simulation model in MATLAB / Simulink to control the front wheel speed. The vehicle speed results obtained from the two models before and after the improvement are compared with the simulation results obtained under the same conditions in CarSim. It is found that when the improved steering model runs at low speed in the vehicle, the front wheel speed can well meet the actual steering requirements and achieve Steering of the vehicle. This shows that the improved model based on the Ackerman steering principle proposed by the author has certain reference significance and reference value for studying the steering control strategy of distributed electric vehicles.
Keywords: Ackerman steering model; Improvement; Electronic differential; Modeling and simulation
CLC NO.: TP391.9 Document Code: A Article ID: 1671-7988(2020)10-118-04
1 引言
近年来,分布式纯电动汽车作为新能源汽车领域的主要发展方向,在实现零排放、低污染的同时,又具有传动链短、驱动效率高的特点[1]。为了提高汽车的能源利用率和行驶性能,文献2[2]以阿克曼转向模型为基础,设计了一种速度滑模控制器,并利用Simulink搭建了差速转向仿真模型,进行蛇形工况实验,将仿真结果并与传统PI控制差速转向结果作对比,首先证明了等效滑膜控制的正确性与可行性,可以实现转向要求。文献3[3]中使用了CANoe-MATLAB接口软件,利用Simulink建立后轮独立驱动的差速模型,并利用CAN模块对建立的模型进行封装处理,使其自动生成执行代码,再将生成代码加载到CANoe电子差速节点中进行仿真,仿真结果显示,该模型能够完成轻型低速电动汽车差速功能。文献4[4]则利用Simulink建立差速转型模型,测试不同转速以及转角下,阿克曼转向原理可否适用,结果显示,基于阿克曼原理所设计的模型只适用于低速静态下的电动汽车仿真,而当车速过高或转角过大时,外侧车轮转速会产生较大偏差,导致车辆无法安全完成转向。上述工作只是在理论层面分析了阿克曼转向原理的适用性,未能与实际数据作对比,本文在上述工作的基础上,提出一种改进后的阿克曼转向模型,并在Simulink完成建模,将所建立的模型与CarSim进行联合仿真比较,结果显示这改进后更好地满足好的满足转向要求。
2 阿克曼转向原理的数学模型
阿克曼原理是由德国车辆工程师“Lankensperger”于1817年提出的,指在车辆转弯时每个车轮绕同一中心转动,从而保证轮胎与地面之间无滑动摩擦而处于摩擦力最小的纯滚动状态[5]。
阿克曼转向原理是在假定汽车前轮定位角为0、汽车行驶系统为刚性、汽车行驶中无侧向力的情况下,四轮绕同一圆心作纯滚动运动。以此来做模型的简化[6]。转向原理如1所示。
图1中,o为转向与圆心,L为车辆轴距,σ为车辆转向角,R0为质心转弯半径,a为前轴到质心距离,b为后轴到质心距离,c为后轴轴距,Rx为转向中心到后轮距离,其中a、b和L為车辆参数,直接设置,σ则由驾驶员输入,控制器采集得到。α,β则是前轮两侧转角,根据输入的转角信号计算得到。
由几何关系得:
根据速度瞬心特性可知,各质点的速度之比等于各点到瞬心的距离之比,可得:
由上述(1)-(3)式可得:
3 改进的阿克曼转向模型
由上述阿克曼转向原理可知,汽车在转向时转向角决定了转向圆圆心o的位置,从而决定了前轮的转弯半径。由于阿克曼转向原理是在理想的情况下所建立的,适用于较低速的情况。基于此,笔者对上述阿克曼转向模型进行改进,令两前轮转角一样大,均视为转向角,改进后的模型如图2所示。
图2中,o为转向圆心,o'和o''为前轮内外侧车轮的转向圆心,α为车辆转向角,R为质心转弯半径,b为后轴到质心距离,L为车辆轴距,c为后轴轴距。
由几何关系得:
4 MATLAB/Simulink的仿真模型建立与分析
4.1 Simulink参数设置
Simulink是MATLAB中包含的一种可视化仿真工具,它向用户提供一个动态系统建模、仿真和综合分析的集成环境,在这一环境中我们无须编写大量程序只需选取适当的库模块,就可以构造出复杂的仿真模型[7]。本文所搭建的模型数据基于某型A级乘用车,其质量为750kg;轴距为2570mm;轮距为1508mm;后轴到质心距离为1564mm。
4.2 Simulink模型搭建
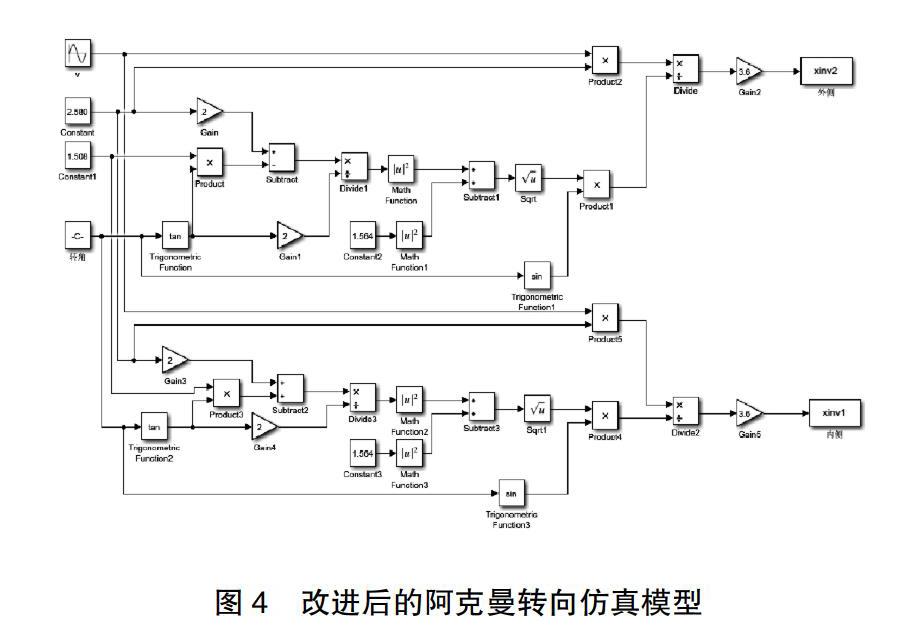
基于上述参数,以车速和转角为输模型输入,以前轮转速为模型输出,根据第二部分以及第三部分得到的关系式,搭建如下模型,其中图3为基于阿克曼原理的转向仿真模型,图4为改进后的阿克曼转向仿真模型。
4.3 Simulink仿真结果
确定车辆转向角为10°,让车速从0起步加速到10m/s,记录四轮的转速,如图5所示。
由MATLAB/Simulink的仿真结果可以看出,在确定汽车转向角及车速的情况下,可以得到汽车前轮转向角以及四轮的相应转速。图4在定转角的情况下改变车速,可以看到,前轮转速大于后轮转速,外侧车轮转速大于内侧车轮转速,内侧转角大于外侧转角,满足公式(3),符合车辆实际情况。
5 CarSim模型建立与对比分析
5.1 CarSim模型的建立
CarSim是一款专业的汽车动力学仿真软件,主要采用面向系统的建模方法。软件结构主要分为图形用户界面、车辆数学模型、求解器三方面[8]。在CarSim中可以直接选取A级乘用车并设置参数,车身参数模型如图6所示,主要参数包括轴距,后轴到质心距离以及轮距。
车身模型建立后,点击“Procedure”按钮,选择模拟过程,设置车速由0到10m/s,转角设置纵坐标为角度恒定为10°如图7、8所示。其中横坐标均为时间由0到10s。
5.2 两种控制策略的对比分析
点击CarSim中的“send to Simulink”按钮,将CarSim的仿真结果导入Simulink中,比较改进前后前轮的转速与实际转速的差值。前轮内侧转速对比结果如图9所示,其中横坐标为实际车速,纵坐标为两种控制策略下不同车速与实际车速的差值。差值越小则说明控制效果越好,汽车不易打滑,转向越安全。
由图9可以看出,在低速运行时,基于阿克曼原理的转向控制效果较好,与实际误差小,在车速22Km/h以下时,最大误差不超过0.3Km/h,汽车可以安全转向,当速度为22Km/h时,误差为0.1km/h。随着速度增加,基于阿克曼原理的转向控制会产生较大的误差,当速度达到25Km/h时,误差达到2.17km/h,此时汽车会产生打滑等现象,存在一定风险。相比于原模型,改进后的阿克曼模型在低速时与原模型基本一致,随着速度增加,相比于原模型误差有明显减少,当速度同样达到25Km/h时,误差为1.9km/h,误差了降低11.5%。
6 结论
针对前述改进的阿克曼转向模型,并通过Simulink与CarSim联合仿真验证可知:
(1)阿克曼转向模型只适合于低速转向,当速度超过22km/h时,电动汽车的差速效果比较差,会产生打滑等现象,无法完成安全转向。
(2)相比于原阿克曼转向模型,改进后的阿克曼转向模型,与实际的转速差值较小,尤其是在中高速时对电动汽车的转向性能有较大的改善。
参考文献
[1] 陈辛波,刘浩,钟再敏,王心坚,谷成.分布式驱动电动汽车的开发和行驶能耗优化分析[J].汽车技术,2014(07):39-43.
[2] 赵琦.四轮毂驱动电动汽车差速助力转向与转矩协调控制研究[D].安徽工程大学,2018.
[3] 许忪,张政.基于CANoe-MATLAB的电动汽车电子差速仿真[J].自动化与仪器仪表,2015(02):189-191.
[4] 华磊,张成涛,陆文祺,王佳奇.轮毂电机电动汽车电子差速低速转向控制仿真[J].广西科技大学学报,2018,29(03):77-81.
[5] 苗立东,章曾,吴晓辉,石沛林.非阿克曼几何状态下汽车车轮受力[J].科学技术与工程,2017,17(31):359-363.
[6] 姜明国,陆波.阿克曼原理与矩形化转向梯形设计[J].汽车技术, 1994(05):16-19.
[7] Anonymous. MATLAB: A Practical Introduction to Programming and Problem Solving, 5th Edition[J]. Chemical Engineering Progr -ess,2018,114(10).
[8] Li Junwei, Yang Huafang.Fuzzy logic applied to yaw moment control for vehicle stability[C].Mechatronics and Automation, 2009. ICMA 2009. International Conference on.2009.
[9] 陳哲明,周鹏,陈宝,付江华.汽车四轮独立转向稳定性控制策略研究[J].计算机仿真,2018,35(07):93-97+147.
[10] 王海涛,陈哲明.汽车转向机构仿真及优化设计[J].计算机仿真, 2013,30(03):162-165+200.
