防摆吊具刚柔耦合动力学分析与结构拓扑优化
2020-06-09田昊许平陈国鼎贺伯林袁红超
田昊 许平 陈国鼎 贺伯林 袁红超
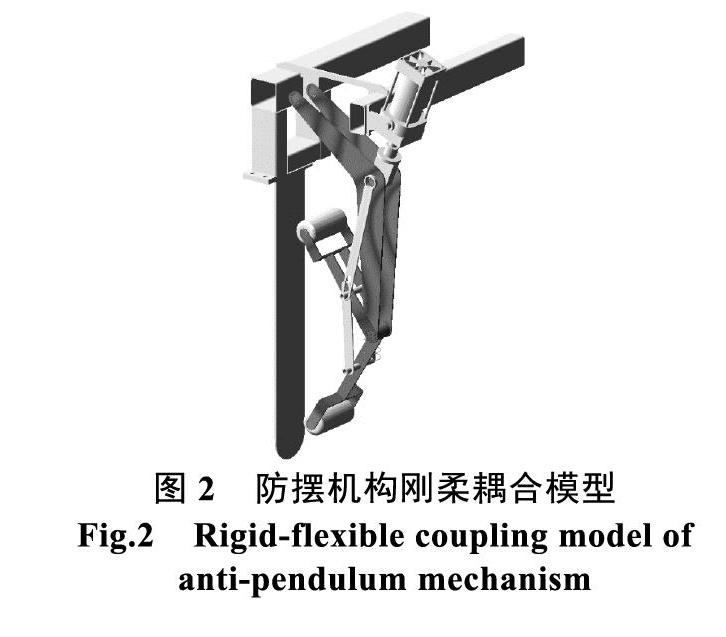
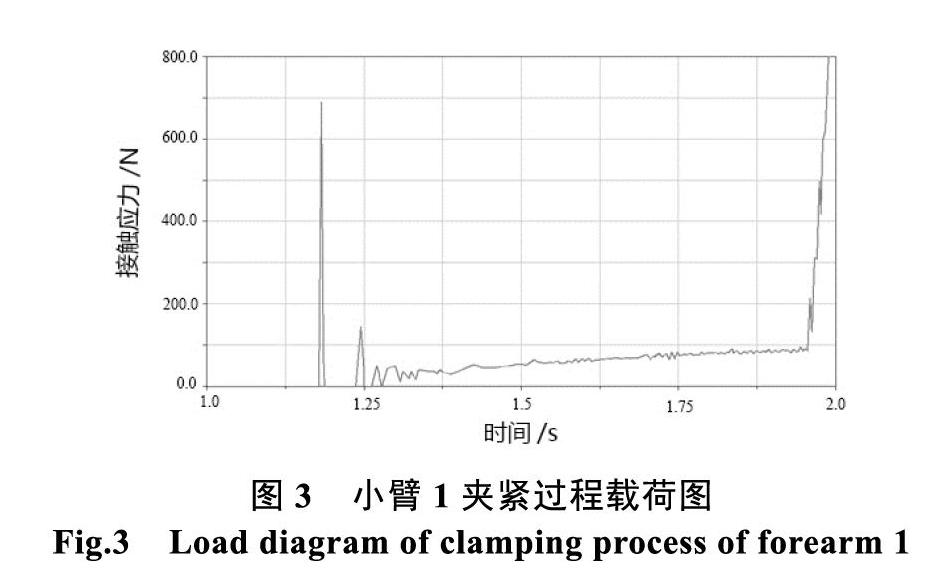
摘 要: 传统吊装夹具应用在有色金属板电解、检测、分拣等工序的搬运等过程,易会出现摆动磕碰等情况,需要设计一种在吊装运动过程中可以防止金属板摆动和减少对金属板表面质量损坏的防摆机构。通过在Pro/E中建立吊装夹具三维模型并装配出整体机构,由于防摆机构在工况下高速运动并且为薄板零件,所以通过柔性体替代刚体进行动力学分析,以模仿真实运动情况。利用HyperMesh做模态分析,导出MNF文件到 ADAMS中,建立机构的刚柔耦合模型。动力学分析输出各构件在防摆机构夹紧运动过程中各铰接处的受力情况以及接触处的冲击载荷。利用OptiStruct进行拓扑优化使得机构整体结构减重48.1%,减轻工业机器人的工作负载,减少对金属板表面的冲击,以获取更好的运动性能。
关键词: 吊具;防摆;刚柔耦合;拓扑优化;ADAMS;HyperWorks;OptiStruct
中图分类号: TH113.2 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.02.043
【Abstract】: Traditional hoisting jig will swing and bump in the handling process of non-ferrous metal plates in the electrolysis, detection, sorting and other processes. It is necessary to design an anti-swing mechanism which can prevent the metal plate from swinging and reduce the damage to the metal plate surface quality in the lifting movement. The three-dimensional model of the hoisting jig is established in Pro/E and the whole mechanism is assembled. Since the anti-pendulum mechanism moves at high speed under the working condition and is a thin plate part, the rigid body is replaced by flexible body for dynamic analysis to imitate the real motion. Using HyperMesh for modal analysis, the MNF file was exported to ADAMS, and the rigid and flexible coupling model of the mechanism was established. Dynamic analysis of the output components in the anti-swing clamping motion of each hinge and the impact load at the contact. Using OptiStruct for topological optimization, the overall weight loss structure of the mechanism is 48.1% to reduce the load of industrial robots, reduce the impact on the surface of metal plates, and obtain better motion performance.
【Key words】: Spreader; Anti-swing; Rigid and flexible coupling; Topological optimization; ADAMS; HyperWorks; OptiStruct
0 引言
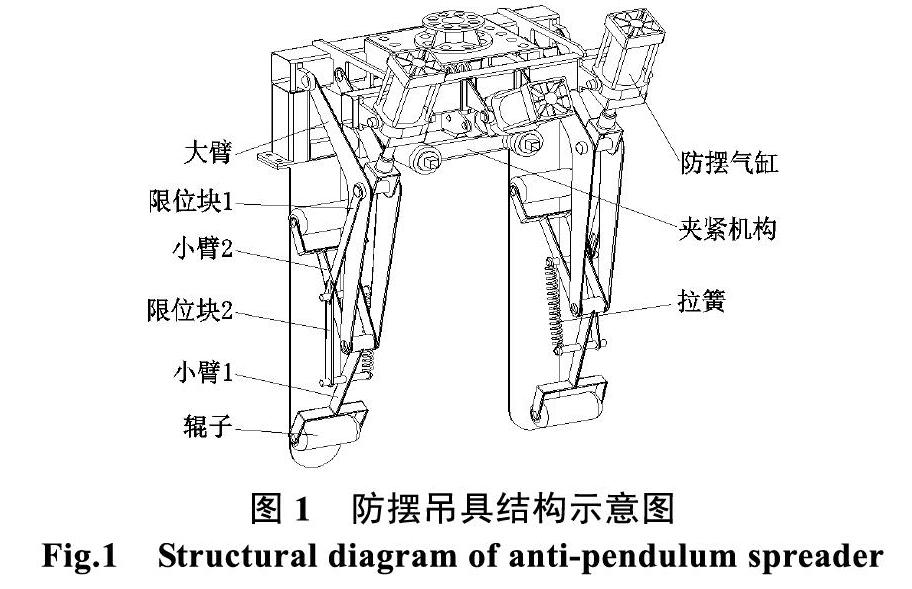
电解金属板的吊具主要应用于对电解后剥离母板并安裝吊装耳环的高纯度金属板在后续加工、检测、分拣、包装过程中的吊装作用,其对传统冶金行业实现自动化起到至关重要的作用。现有吊具在工作过程中由于只吊取耳环上横梁的位置使得金属板在被吊取运动过程中发生惯性摆动,这在空间有限的工厂环境中很容易发生磕碰情况,稀有纯金属一般质地较软并且质量大易发生变形,对后续加工产生不必要的麻烦。但增加防摆机构又使得吊具重量大增,同时可能在夹紧过程中对金属板面造成冲击变形,并且对工业机器人的功率型号和能耗提出更高的要求,这时就很有必要借助优化设计的手段对防摆机构进行优化。
结构优化技术是当前CAE技术发展的一个热点,OptiStruct采用数学规划方法,通过求解灵敏度构造近似显式模型,采用小步长迭代找到最优解,是目前工程上高效、稳健的优化方法,在工业界中的应用也逐渐成熟[1]。利用结构优化技术进行结构设计,可以在设计前期就参与到结构参数的确定,为设计的分析改进节省时间,降低吊具重量和制造成本,使结构设计更加合理、经济。本文通过ADAMS刚柔耦合仿真和OptiStruct拓扑优化分析,得到了吊具的夹紧、冲击双工况优化结果,并对优化结果进行了对比,可为类似结构优化设计和现实生产提供参考。
1 防摆机构刚柔耦合建模及仿真
1.1 防摆机构刚柔耦合模型建立
ADAMS柔性模块是采用模态来表示物体弹性的,它基于物体的弹性变形是相对于连接物体坐标系的弹性小变形。其基本思想是赋予柔性体一个模态集,采用模态展开法,用模态向量和模态坐标 的线性组合来表示弹性位移,通过计算每一时刻物体的弹性位移来描述其变形运动[2]。
2.2.1 设计变量
厚度和体积是执行力臂的主要结构参数,是在规定的载荷条件下,保证结构强度和刚度以及使用寿命的基本条件。本次优化设计选择的设计变量为除铰孔周围预留区域的其余部分。
2.2.2 约束条件
大臂约束最小厚度为6 mm,末端与回转铰接处全方向最大位移为4 mm,并设置加工方向为厚度方向。小臂1和小臂2约束最小厚度,末端与回转铰接处全方向最大位移为2 mm,并设置对称中心面。将迭代次数上限设置为500确保完全迭代,停止迭代条件为近10次求解相近停止。
2.2.3 优化数学模型
优化设计有三要素,即设计变量、目标函数和约束条件。设计变量是发生改变从而提高性能的一组参数;目标函数要求最优的设计性能,是关于设计变量的函数;约束条件是对设计的限制,是对设计变量和其他性能的要求。优化数学模型可表述为:
2.3 拓扑结果分析
大臂优化历程经过了148次迭代,小臂1经历了46次迭代,小臂2经历了57次迭代实现了结果稳定收敛[8-9]。鉴于线性屈曲分析得到的临界屈曲载荷是非保守的,通常比结构的承载能力大,一般是稳定承载能力上限[10]。根据对拓扑优化结果向上圆整的思想和对机构进行可加工性设计得到结构与设置合适的w,得到最优解密度对照图如图4所示[11]。新结构中大臂重量由2.73 kg减重到1.17 kg减重57.2%;小臂1重量由1.75 kg减重到1.34 kg减重24.5%;小臂2重量由1.99 kg减重到1.10 kg减重44.8%,两个防摆机构执行力臂重量由18.4kg减重到9.56 kg减重48.1%。
2.4 减重后的动力学仿真对比
将拓扑优化后的新结构通过HyperMesh进行柔性化,沿用之前的刚柔耦合动力学模型以柔性体替换柔性体的方式进行替换如图5所示[12]。图6图7是防摆机构原始结构和优化结构的冲击载荷变化规律。
由图7可知,较原始结构由于改变机构质心和减轻机构质量,新机构中小臂1和小臂2在前期波动环节都有参与,接触应力峰值明显降低,由685 N降低到275 N,降低幅度40.1%。并且由于改变机构质心,新机构中小臂1和小臂2在前期波动环节都有参与,对金属板或机架冲击情况得到较大改善,但是总波动次数有所增加。冲击载荷峰值发生在即将夹紧的时间段,说明由于惯量的减少使得之前的运动处于围绕铰接处的往复旋转运动,使得更快进入稳定阶段。
3 结论
(1)根据柔性体建模基本理论,通过有限元分析软件HyperMesh生成关键部件的柔性体,在动力学分析软件 ADAMS 平台上,使用虚拟样机技术,建立了一款防摆吊具刚柔耦合仿真模型。
(2)采用OptiStruct软件对防摆吊具进行拓扑优化设计分析,通过设置合适参数优化出符合加工要求的最优结构。
(3)对优化结果通过ADAMS进行了动力学验证,最后得出机构在运动过程中的冲擊载荷明显降低,同时机构重量得到减轻,可为类似结构优化设计提供参考。
参考文献
闫利, 马爱军. 基于OptiStruct的载人航天环境模拟舱结构优化设计[J]. 航天医学与医学工程, 2017, 30(4): 283-286.
刘俊, 林砺宗, 刘小平, 等. ADAMS 柔性体运动仿真分析 研究及运用[J]. 现代制造工程, 2004(5): 53-55.
丁寿滨, 常宗俞, 武雅洁, 等. ADAMS与常用CAD软件之间的接口[J]. 微计算机信息, 2005, 21(10-3): 202-204.
毕厚煌, 何家宁, 谭蓉, 等. 基于 ABAQUS 和 ADAMS 的悬臂式起重机结构设计与 刚柔耦合动力学分析[J]. 机械设计, 2017, 34(11): 16-21.
董玉红, 许洪涛, 张立勋, 等. 大型零件搬运装配的智能辅助设备防摆控制[J]. 哈尔滨工程大学学报, 2009, 30(6): 681-685.
李增刚. ADAMS入门详解与实例[M]. 北京: 国防工业出版社, 2006: 125. l
曾攀, 雷丽萍, 方刚. 基于 ANSYS 平台有限元分析手册结 构的建模与分析[M]. 北京: 机械工业出版社, 2011.
韩婷. 基于ANSYS的车架拓扑优化设计[D]. 武汉: 武汉 理工大学, 2013.
林丹益. 汽车发动机支架拓扑优化及有限元分析[D]. 杭 州: 浙江工业大学, 2013.
林利红, 文琴, 王成. 圆锯片结构拓扑优化[J]. 机械设计, 2018, 35(6): 24-28.
季武强. 飞机机翼结构拓扑优化方法研究及其实现[D]. 沈阳: 沈阳航空航天大学, 2013.
严宏志, 朱翰成, 叶辉. 4自由度机器人刚柔耦合仿真及结构改进[J]. 机械设计, 2015, 32(3): 56-61.
