欧勇盛研究团队提出一种机器人动态系统快速稳定的学习方法
2020-06-09
中国科学院深圳先进技术研究院智能仿生研究中心欧勇盛研究团队在机器人动态系统示教学习方面的研究取得进展。相应成果为“Duan JH, Ou YS, Hu JB, et al. Fast and stable learning of dynamical systems based on extreme learning machine[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(6): 1175-1185(基于超限学习机的动态系统快速稳定学习)”。
机器人操作的应用场景广泛、潜力巨大,但无论是在常规环境中,如工厂中拾取工件或搬运货物、家庭中协助取物或打扫卫生,还是在特殊环境中,如海底进行沉船打捞、空间站从事在轨加注实验,机器人都必须掌握复杂精巧任务的操作能力。但就现阶段而言,大部分机器人仍然部署在结构化环境中,按照人工预定义的规则从事单一、重复和具有规律性的工作。对于许多人类能掌握的复杂技能,机器人仍然很难有效地掌握。因此,赋予机器人从人类的经验和习惯中学习控制策略的能力,实现对更复杂一类操作技能的掌握,是提高机器人智能化水平、降低机器人使用门槛和部署周期、促进产业升级的重要途径。
该研究采用示教学习(Learning from Demonstrations)技术通过从人类示教的数据中建立动态系统模型,使机器人理解和学习点到点运动技能。具体地,提出一种机器人动态系统快速稳定的学习方法——将机器人的点到点运动过程建模为一个自治的动态系统,并使用超限学习机(Extreme Learning Machine)这种结构简单、训练快速的神经网络对模型进行训练。同时,为保证训练出的系统具有稳定性,将李雅普诺夫稳定性约束融入到机器人点到点运动学习的优化过程中,确保到点运动既能最大程度地模仿人类示教的轮廓,也能稳定收敛到期望的目标位置。
基于洛桑联邦理工学院 LASA 实验室开发的手写运动数据集,将所提出的方法与现有方法进行对比实验。结果显示,所提出的方法在综合考虑准确性、稳定性和学习速度的情况下,与现有 SEDS 方法相比,精度提高了 17%~27%,训练速度提高了 68%~84%。
该研究所提出的示教学习方法充分利用了前馈神经网络超限学习机的快速学习能力和李雅普诺夫理论对稳定性的约束能力,构成了解决控制稳定性、复现精度和学习效率三者矛盾的新方案,是传统控制理论在智能机器人技术中的新突破。所提出的方法体现了机器人能够在掌握人类控制策略或行为习惯的前提下,完成预期的任务目标,反映出一定的泛化性与实用性。
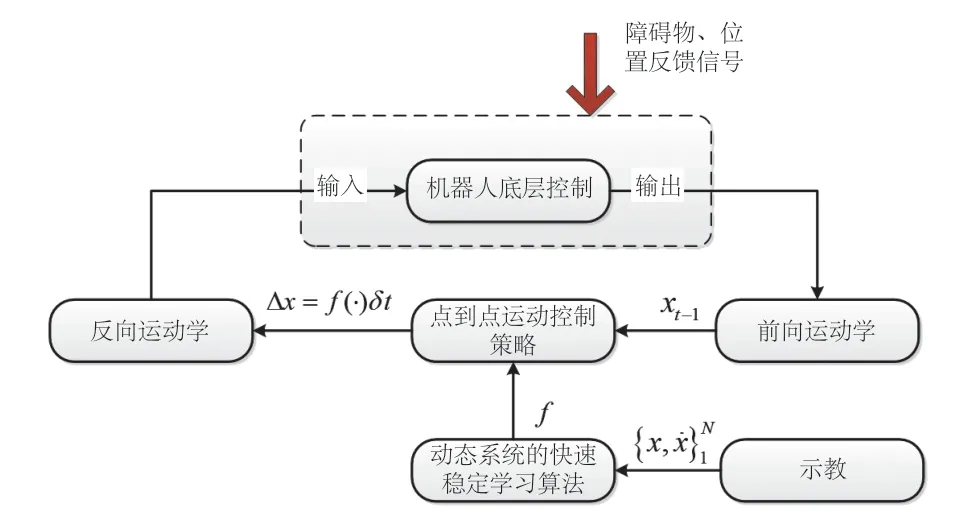
图 1 基于动态系统的点到点运动学习流程图
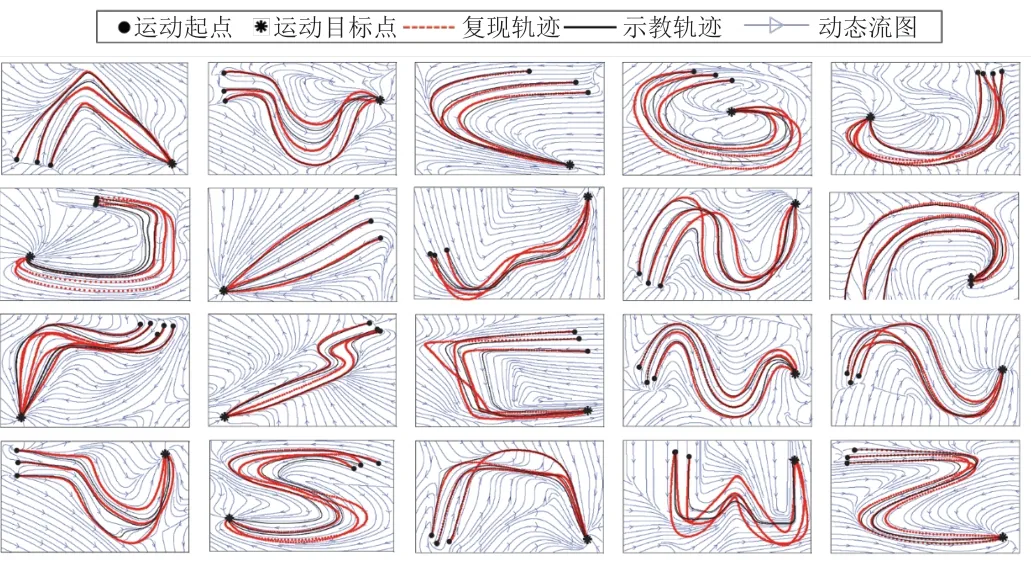
图 2 20 组手写运动学习后的复现运动轨迹