77 GHz FMCW车载雷达系统设计
2020-06-04张科遥林福江白雪飞
张科遥,林福江,白雪飞
(中国科学技术大学 微电子学院,安徽 合肥 230026)
0 引言
随着社会科技的发展,智能汽车和无人驾驶会成为未来汽车发展的必然趋势[1]。智能汽车主要关注的就是快速获取车身发动、行驶和制动等过程中的关键性能参数,而这些参数依赖于高灵敏度的车载传感器的应用[2]。其中,毫米波雷达作为车载传感器的主力一直以来都是研究重点。
目前车载雷达研究的主要波段为24 GHz和77 GHz, 其主要原因是因为电磁波在空气中传播存在衰减,而在24 GHz和77 GHz有极小值,即存在“大气窗”[3]。与已经相当成熟的24 GHz相比,77 GHz雷达具有更加优越的性能和发展空间,主要包括:更小的天线尺寸便于更好地集成;速度灵敏度可以做到更高;目标的雷达截面积更大,发现相同大小的目标所需的发射功率更小等[4]。但是,由于实际环境的多样性和复杂性,实际应用过程中环境噪声对于雷达监测有着很大的影响,除此之外,如何准确测量目标以及监测实时性都是车载雷达需要关注的重要指标。本文研究内容涉及雷达信号处理系统的设计,以及如何实现快速的精确测量。
1 信号分析
1.1 测距测速原理
FMCW雷达发射一个连续波信号,高频的载频信号经过低频调制信号调制产生一串频率随时间线性变化的锯齿波形,如图1所示单个锯齿波的扫频周期为Tc,起始频率为f0,扫频带宽为B。通常对于静态目标,假设目标回波是发射信号的复制波,产生回波延迟τ=2R/c,R为目标距离,c为电磁波传播速度。

图1 收发信号时频图
当目标为静态,接收信号和发射信号经过混频生成一个频率固定的频差信号Δf,公式如下:
(1)
根据式(1)可以看出频差信号Δf是一个与目标有关的随机变量信号,通过测量Δf可以计算出目标距离。利用距离-多普勒处理原理,进一步对收发信号进行分析,其中一个调频周期的发射信号可表示为[5]:
(2)
其中,A为信号幅度,f0为信号载频,B为调制带宽,T为调制周期,φ0为初始相位。对应的瞬时相位可表示为:
(3)
接收信号可表示为:
(4)
由于接收信号相对于发射信号有一个时延τ,因此对应瞬时相位可以表示为:
(5)
收发机前端对收发信号进行混频,经过低通滤波得出的信号相位差表示为:
(6)
通过相位差对时间求导可以得到收发信号频差,然后通过式(1)可以求出距离。考虑到实际场景中目标会有位移,所以接收信号会有偏移频率,这个频率称为多普勒频率fd,那么收发信号的相位差根据式(6)可表示为:
pm(t)=pt(t)-pr(t)
(7)
由于v≪c,可对上式进行必要简化,得到:
(8)
由以上分析可知,运动目标回波得到的差拍信号仍可以看作是一个线性调频信号,该信号参数如下:式子中等效调频带宽Bm=4Bv/c,等效的载频fm=fd+Δf=f02v/c+2R0B/cT,多普勒频率fd=f02v/c,初始相位φm=f02R0/c-2BR0/Tc2。所以根据差拍信号对应的相位差得到多普勒频率,进而可以计算出目标速度。
1.2 波达方向估计原理
对于阵列天线,考虑远处存在一个目标,其回波信号到达各个相邻阵元会有一个固定的波程差,由发射电磁波波长、阵元间距以及入射角共同决定相位,该相位差包含了波达方向(Direction of Arrival,DOA)信息,通过估计相位差可以得到对DOA的估计,即目标的方向信息。
图2简单说明了DOA估计原理。假设阵元间距为d,目标回波方向和天线法向夹角为θ,则相邻阵元波程差为dsinθ,对应相位差可表示为:
(9)
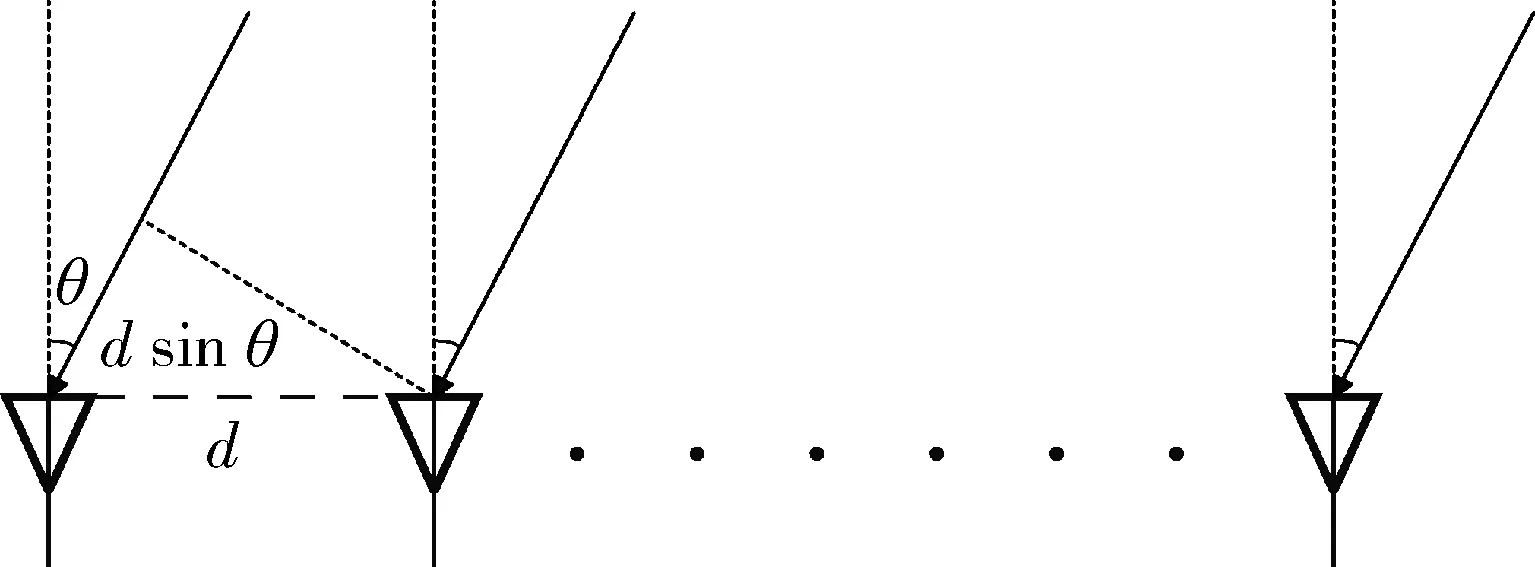
图2 DOA估计原理
根据相位差信息就可以反算出DOA对应的方向角θ。采用数字波束合成完成DOA估计的相关计算。
1.3 数字波束合成
针对阵列天线,利用阵列天线孔径,通过对数字信号进行处理,从而在期望方向形成有向性接收波束。通过数字相位补偿器对某一方向入射信号进行相位补偿,实现波束指向目标,阵列天线能量接收最大。这种在某个方向上形成波束指向接收并回波,称为数字波束合成(Digital Beam Forming,DBF)[6]。
如图3所示,回波信号经过数字相位补偿器再通过累加器得到输出信号,归一化方向性函数可表示为:
(10)
式中N为阵元个数,λ为雷达工作波长,d为阵元间距,θ为波束指向角。
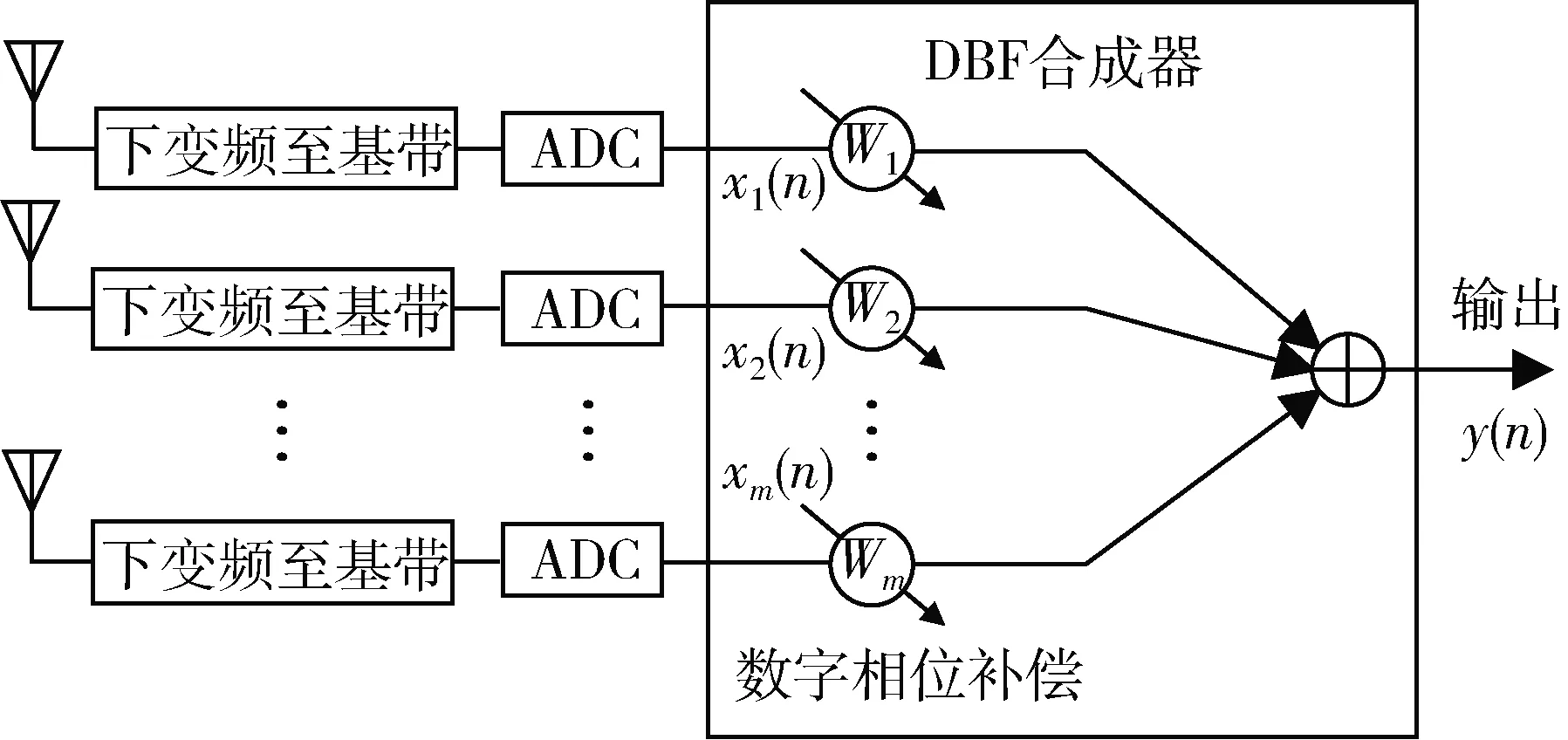
图3 DBF框图
假设目标位于远处,方位与天线法线夹角为θ0,当方向性函数满足波束指向角θ=θ0时,方向图函数F(θ)=1,即方向图指向在角θ0方向。
应注意的是,相控阵雷达天线在工作时应保证不出栅瓣,应注意波束指向角的范围。为了避免出现栅瓣,要求满足[7]:
(11)
可以得到不出现栅瓣的条件为:
(12)
当雷达的工作波长λ确定后,只要调整阵元间距d就可以满足上式,从而不出现栅瓣。一般扫描角度都不会超过60°,所以为了避免出现栅瓣,通常取d/λ≤0.5。
2 车载雷达系统设计
2.1 系统总体设计
雷达系统总体设计框图如图4所示,系统主要包括两个部分:射频前端模块和数字基带处理模块。
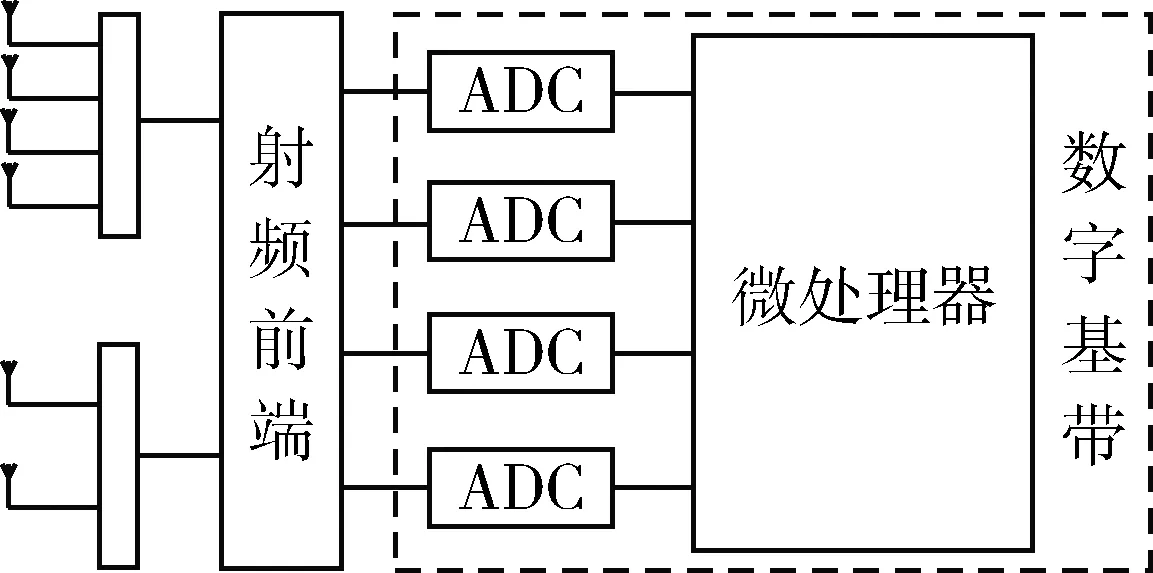
图4 雷达系统框架
射频前端模块采用了一个高度集成的77 GHz雷达收发芯片,由两个发射通道、四个接收通道、频率合成器和调频连续波(FMCW)雷达信号发生器组成,因此可以采用多发多收(Multiple Input Multiple Output,MIMO)技术实现2×4个接收通道,理论上可使角度分辨率增加一倍。收发芯片集成了雷达前端所需的所有射频、模拟和混合信号块,无需外部辅助模拟/射频芯片或无源器件。微处理器包含了高速高精度的4路16 bit数模转换器(Analog-to-Digital Coverter,ADC),ADC采样率最高可达10 MHz, 满足所需的采样要求。此外该芯片包含了多个高速信号运算单元(Signal Processing Toolbox,SPT),能够实现对数据的并行处理,非常适合雷达信号处理中大量涉及的快速傅里叶变换(Fast Fourier Transform,FFT),大大缩短了整个系统的运算处理时间,提升了雷达实时测量的能力。
2.2 射频前端模块
如图5所示,外部晶振产生一个稳定的频率信号,倍频到锁相环(Phase-Locked Loop,PLL)控制压控振荡器(Voltage Controlled Oscillator,VCO)产生线性调频连续波,然后倍频经过放大作为发射信号;目标的回波信号被接收天线接收,经过一级低噪声放大器(Low Noise Amplifier,LNA)与发射信号进行混频,产生的差拍信号经过低通滤波器(Low Pass Filter,LPF)滤掉高频差频干扰,再经过功率放大器(Power Amplifier,PA)对信号进行放大,得到的中频信号由ADC采集到主控芯片内进行数字信号的相关处理。
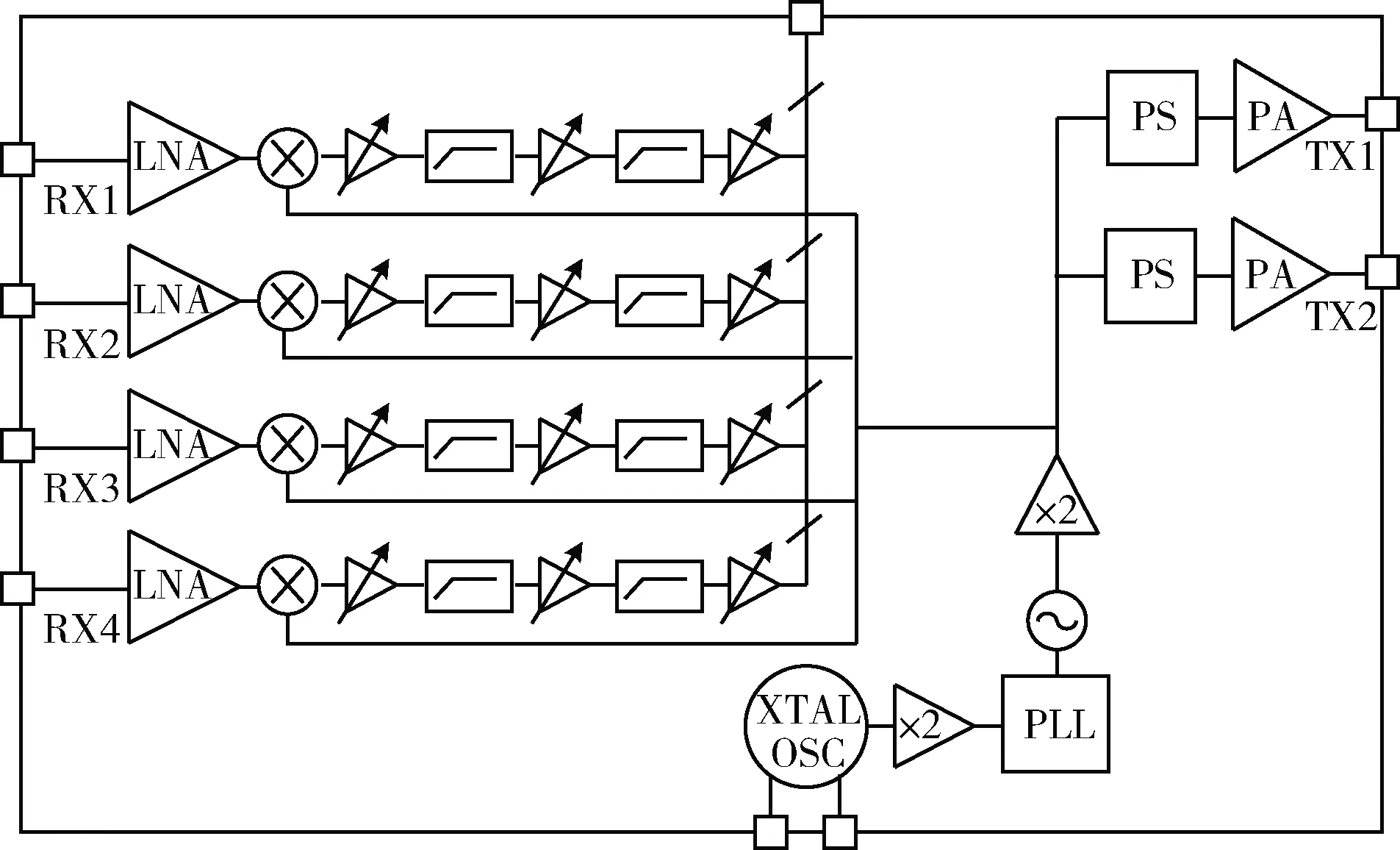
图5 射频处理模块结构图
2.3 数字基带处理模块
相对于比较固定的射频前端设计,雷达信号的处理主要是多步骤的FFT运算,需要依赖数字基带部分完成。信号处理过程涉及的计算复杂度,很大程度上决定了雷达系统处理的快慢程度。该部分的系统结构如图6所示。
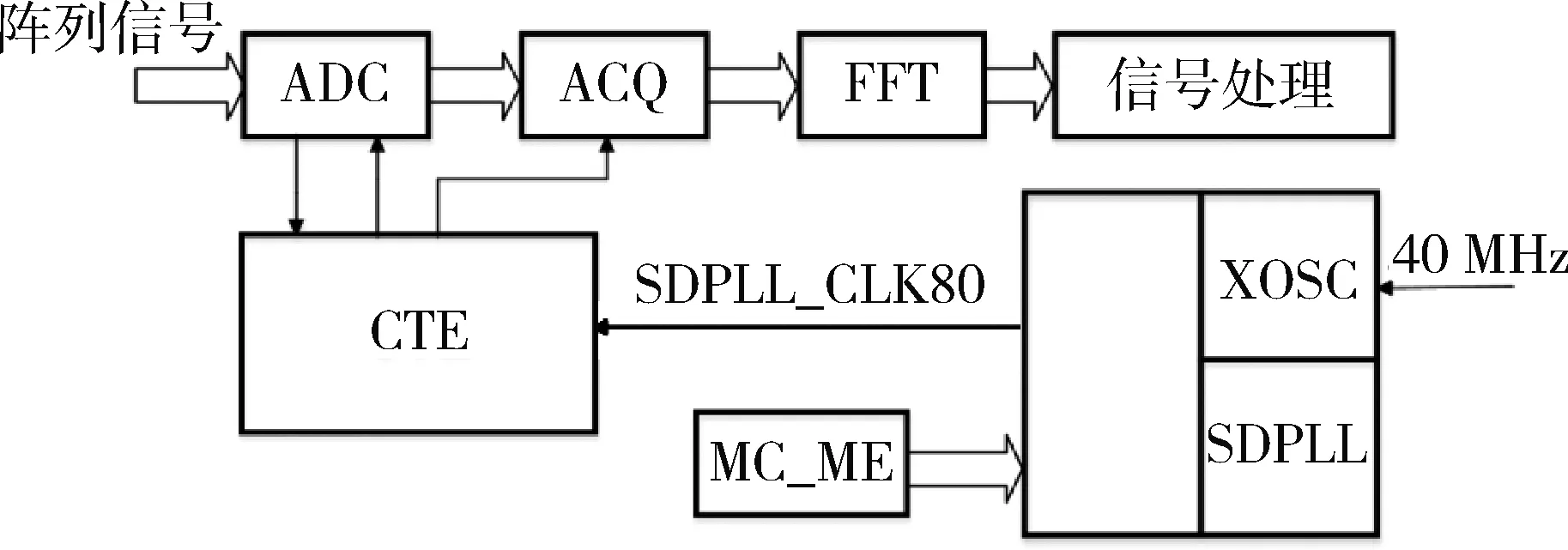
图6 数字基带信号处理流程
交叉触发引擎(Cross Triggering Engine,CTE)模块负责雷达系统信号的单独时序和雷达处理流程控制,主要是CTE触发ADC采样捕获以及数字信号处理单元(Signal Processing Toolbox,SPT)程序执行。时钟控制模块负责给芯片启动提供16 MHz的内部时钟,并给ADC提供40 MHz的外部时钟。模式输入模块(Mode Entry Module,MC_ME)控制所有功能状态下的芯片模式及模式转换序列,可以根据需求从一种工作模式切换到另一种工作模式,例如:RESET、DRUN、SAFE、TEST等系统模式,配置这些模式可以满足功耗管理和处理时速的需求。
2.4 信号处理流程
信息处理流程如图7所示。SPT作为数据并行处理模块,一次最多只能实现8点数据同时处理,雷达系统相干累计周期和每个周期采样点数增加一倍,会使SPT计算时长增加一倍。因此,需要合理选择相干累计周期和单周期采样点数,以满足雷达50 ms数据更新时间的要求。

图7 信号处理流程
3 雷达信号处理仿真与实测
3.1 仿真结果
在信号分析原理基础上,本文进行了理论仿真,假设目标距离雷达100 m,相对速度90 km/h。预设参数扫频带宽B= 250 MHz,采样率fs= 10 MHz,单发射周期Tc= 60 μs,256点采样,相干累计周期数512[8]。图8所示是信号幅度经过归一化的仿真结果。
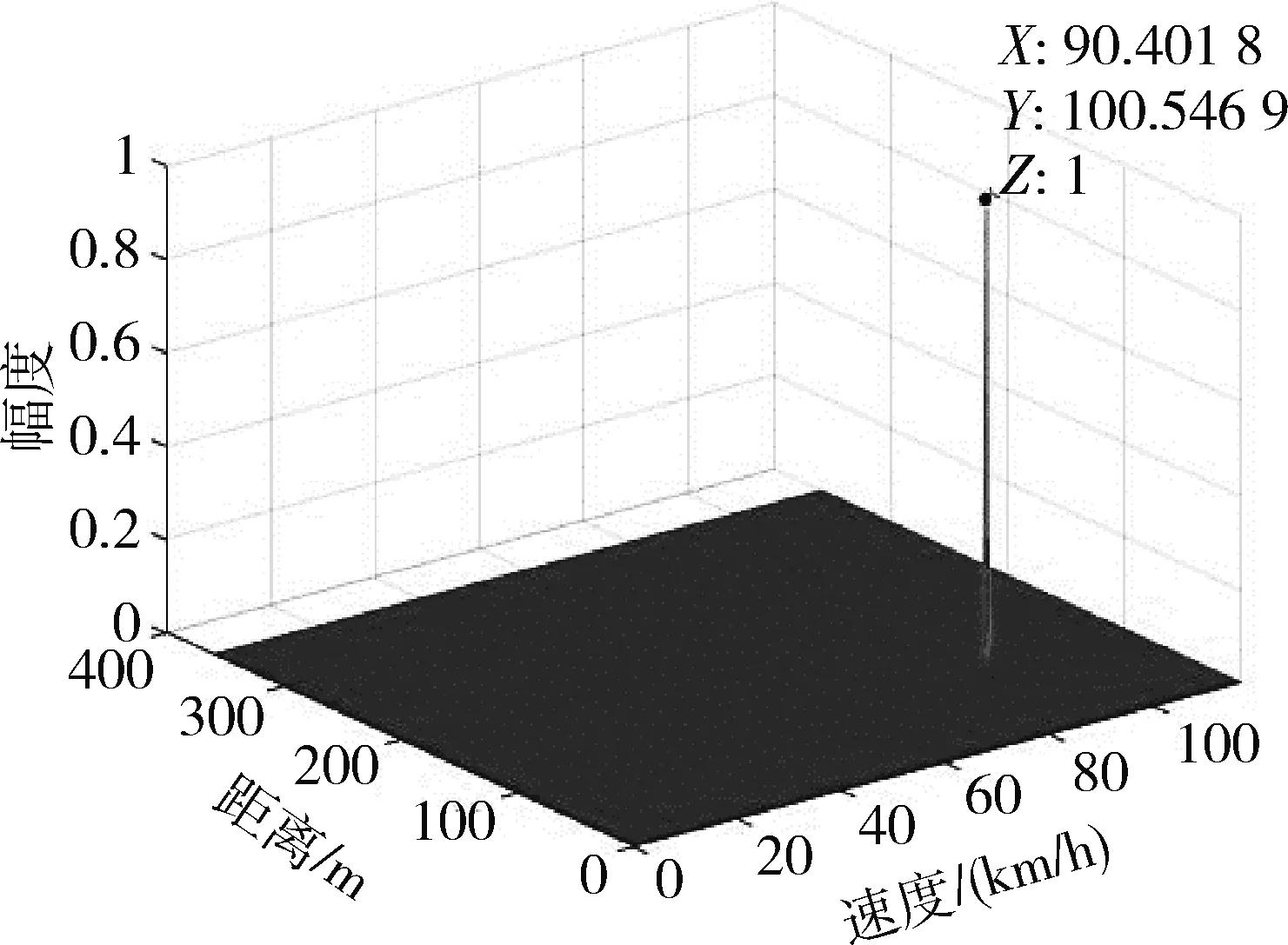
图8 距离/速度测量仿真结果
雷达设计可测角范围为±60°,分别假设目标方向角θ=0°和θ=10°,图9所示为幅度归一化仿真结果。
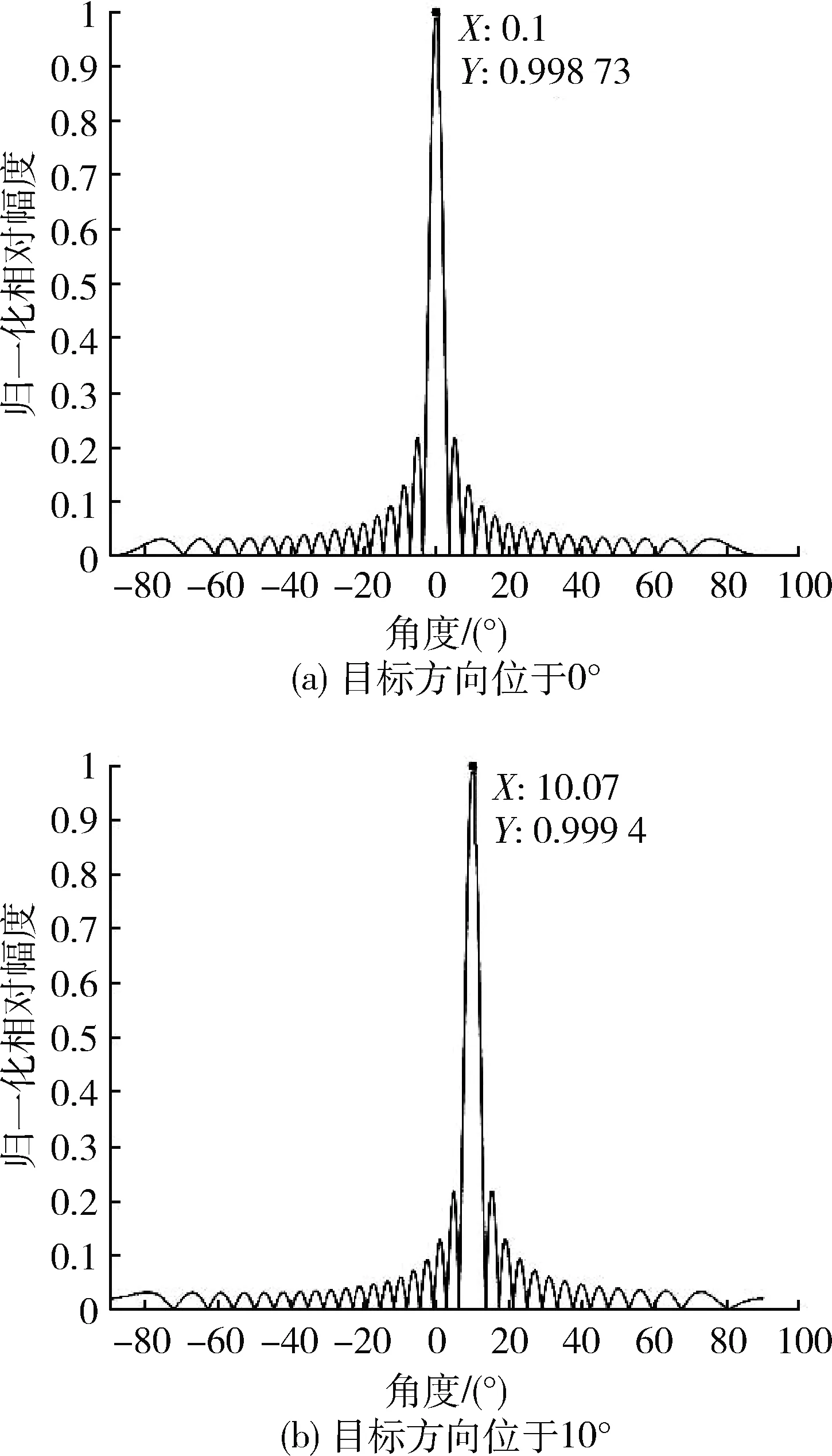
图9 目标方位仿真
3.2 测试结果
考虑实际测试条件限制,无法展示移动目标测速结果。为了验证本文设计的雷达系统,对多个距离下的目标进行了距离测量。目标位于雷达正前方,具体测试结果如表1所示,测量误差在2%以内,属于可接受范围内。
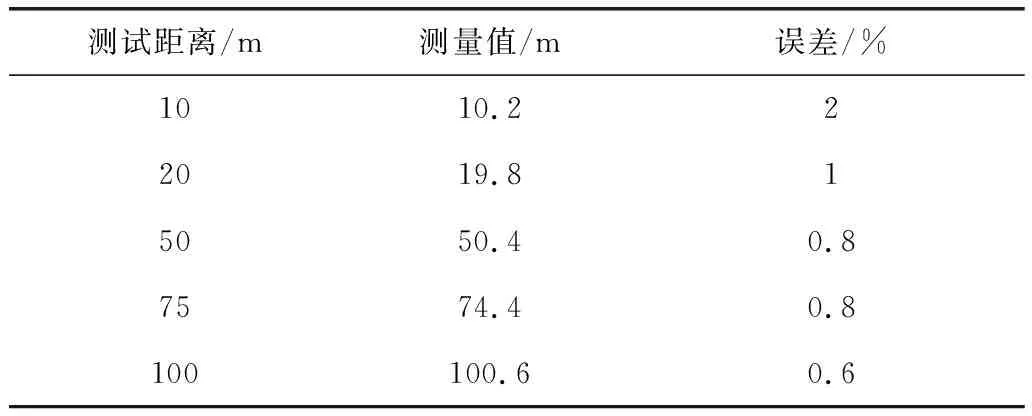
表1 实际测量距离误差
其中,目标位于100 m处时的测量结果如图10所示。
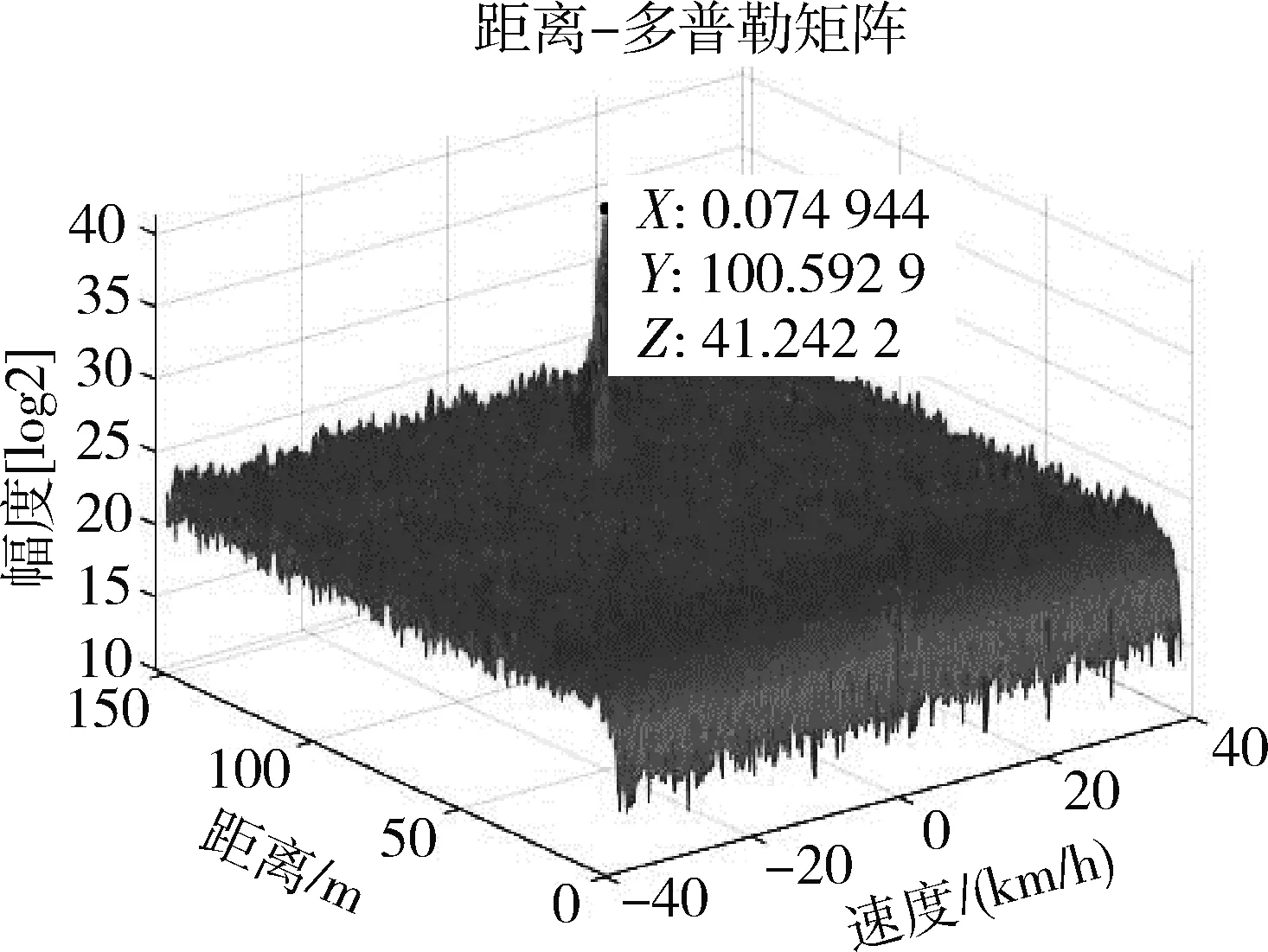
图10 距离/速度实际测试结果
相比远距离放置目标,近距离放置目标可保证较高的测量精度与较小的测角误差。实际测试过程中,对一定范围内的多个角度进行了测量,角度测量误差在±1°。为了方便与仿真结果对比,取位于0°和10°方位上的测量结果,具体如图11所示。
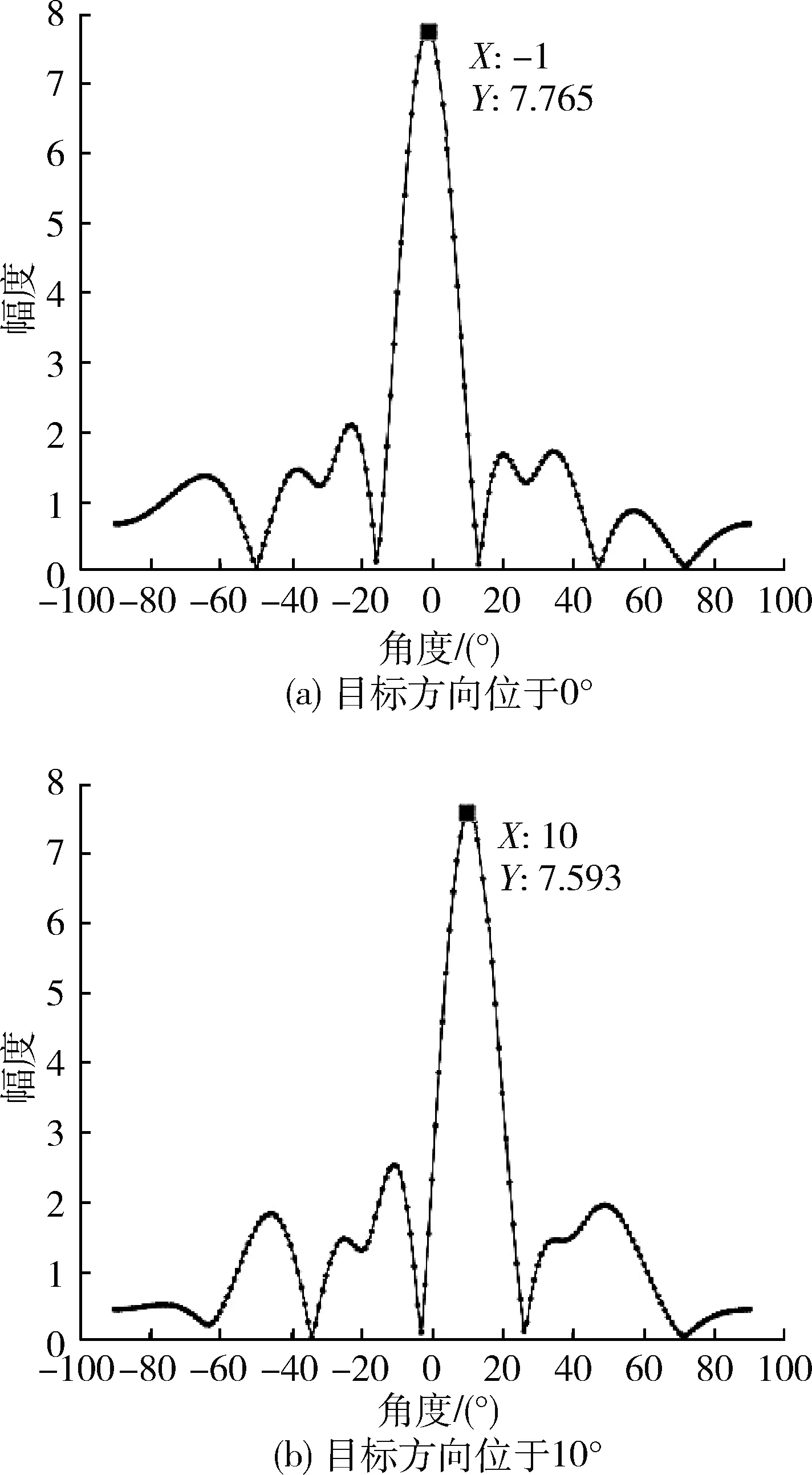
图11 目标方位实测
4 结论
本文首先确定了线性调频与快速啁啾序列(Fast Chirp)相结合的发射波形来实现2D-FFT,它允许在距离和多普勒范围内对目标进行独立识别;然后利用CFAR算法来提升雷达在复杂环境中的信噪比;最后采用DBF技术完成DOA估计从而得到环境中被测目标的距离、速度和角度信息,完成了从仿真到实际场景的相关测试。根据这个设计思路,基本实现了初始理论计算的设计要求,雷达数据更新时间控制在了50 ms以内,能够实现车载雷达对目标的实时监测。但是在设计过程中也发现了一些问题,例如:芯片最大采样率有限;FFT点数增加会提高分辨率,但是也会增加数据更新时间,对实时监测有影响。
而在测试过程中,也发现了一些内容可以进一步研究和深入,例如在更加复杂的环境中,最直接的影响就是目标数量的增加,需要提高雷达检测精度。这对CFAR和DBF处理算法在不明显提高计算复杂度的基础上,对数据快速准确处理的要求更高。如何平衡和解决这些问题,在实际应用中具有重要的意义,也是作者研究课题下一步需要调研的地方。
