厦门CORS RTK高程精度控制方法
2020-06-03陈华南
陈华南

摘 要在互联网时代背景下,RTK技术在城市测绘工程中已经得到广泛的应用,并且取得了良好的效果,已成为城市平面定位的重要技术之一;但在高程测量方面,由于RTK高程精度具有不确定性,其应用受到一定程度的影响。本文从削弱卫星信号传播误差影响、正确设置虚拟参考站、观测数据质量控制及外界环境影响控制四方面对厦门网络RTK高程测量进行研究分析,可为RTK测高应用提供一些借鉴和参考。
关键词网络RTK高程;VRS;精度控制
0 引言
在测绘工作中,RTK以其平面定位精度高、时间短、无误差累积、操作简单、全天候等优点,在测绘各个领域被广泛运用。RTK测量技术在平面控制测量中已得到广泛应用,并取得显著效益,但RTK高程却没有像RTK平面坐标那样被广泛应用,主要原因是RTK高程的影响因素较多较复杂,高程成果精度有时无法满足城市测量的需求。想获得较高精度的RTK高程,需要多措并举。
1 RTK高程影响因素
RTK高程由流动站测得的大地高减去流动站的高程异常获得[1],如式:
其精度在由大地高向正常高转换中,由于方法不同,受高程异常精度和垂线偏差的影响,导致正常高精度存在不确定性。另一方面,RTK大地高的精度也制约着正常高的精度,而大地高测量精度受卫星信号传播过程误差、GPS观测数据质量、外界环境、人为因素的影响。故RTK高程测量一定要谨慎,反复校核,排除粗差,才能得到精度较高质量可靠的RTK高程。
2 厦门RTK高程精度控制方法
厦门RTK运行采用的是网络RTK模式,其中包括7个基准站组成CORS网、管理中心、数据通信网、用户服务中心。因RTK高程精度受多方面因素的影响,为保证RTK高程的稳定可靠,在实践中,厦门网络RTK从以下四方面进行质量控制。
2.1 卫星信号传播过程产生的误差控制
利用网络RTK技术有效消除卫星信号传播过程产生的误差,包括GPS轨道误差,电离层、对流层延迟误差,控制参考站与流动站间线性误差传递。
RTK技术在应用中遇到的较大问题是参考站关于卫星信号传播过程产生的误差校正数据的有效作用距离。GPS误差的空间相关性随参考站和流动站距离的增加而逐渐变差[2],为了克服传统单基准站RTK技术的缺陷,厦门采用网络RTK技术——厦门CORS技术。厦门CORS由均匀分布的7个连续运行参考站组成,覆盖整个厦门市行政区域范围,最长基线32.6公里,最短16.2公里,平均23公里。如下图所示:
外业测量中,流动站将NMEA格式单点定位坐标发送到服务器,服务器据此自动选择最佳的一组固定基准站,基于这组基准站的实测差分值建立误差模型,并在流动站旁生成一个虚拟参考站及内插计算差分改正值,通过NTRIP协议实时向流动站分发差分数据,流动站根据接收的差分信号实时求解双差模糊度,解算出流动站的三維定位坐标,流程见下图。该方式能有效消除卫星信号传播过程产生的误差,并解决RTK作业距离的限制问题,消除校正数据线性传递误差。
2.2 正确设置虚拟参考站
厦门RTK高程在测绘工作中采用VRS(虚拟参考站)模式下流动站获取正常高的方法[3]。基本原理如下:因大地水准面连续、均匀,且流动站与VRS距离较短,可认为流动站与虚拟参考站具有相同的高程异常。如下图所示,将VRS坐标沿垂线方向平移,则各流动站也将在高程方向变化相同的量,从而实现大地高到正常高的转换。
但是,VRS至流动站的距离越远高程异常值的差异越大。日常作业中,当流动站与VRS距离超过500米时服务器自动重新生成新的虚拟参考站,才能获得作业要求的高程精度。
2015年8月,我们用此方法对覆盖厦门市的14个D级GPS点进行RTK检测。检测结果发现生成的虚拟参考站与流动站距离最大为7.11米,最大高程较差为3.7cm。比之前采用的单基站法获取正常高精度约为10cm有了很大提升。检测结果见表1。
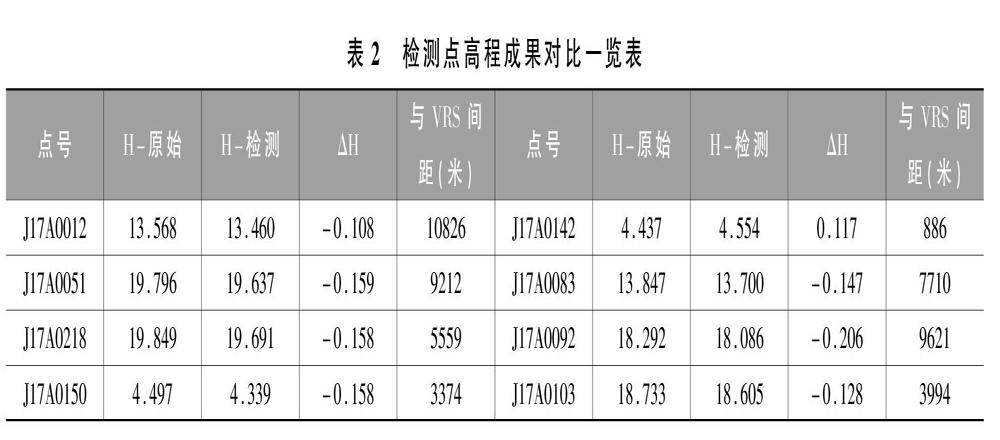
2018年4月对厦门市集美及海沧区的31个D级GPS点及一级导线点进行了RTK检测,且有意将流动站设置成只对距离最近的基准站生成VRS虚拟站,而不是在作业半径500米内生成虚拟站。检测结果有8个点的高程较差超过10cm,详见表2。
由此可见,VRS虚拟参考站点离流动站点越远,与流动站的观测条件差别越大,一方面导致差分改正数不反应流动站的实际情况,另一方面也导致高程异常不具代表性,从而导致高程精度非常不稳定。这从反面说明VRS模式下流动站获取正常高方法的重要性。
2.3 观测数据质量控制:制定标准的作业流程,尽量避免外业测
量过程中对RTK高程精度产生主观的不良影响。
(1)硬件要求:RTK要选择精度等级不低于基线精度5mm+1ppm、高程精度10mm+2ppm的仪器。
(2)仔细选择时段,确保RTK观测点具备良好的对星图形条件,进行观测时,卫星状态应符合表3规定。
(3)观测开始前应初始化并得到固定解,当初始化时间超过2分钟仍不能获得固定解时,宜断开、重新连接通信链路进行初始化操作;当接收机重新启动3次仍不能获得固定解,应选择其他位置或时段进行作业。
(4)观测时应采用三脚架对中、整平,每测回历元数不少于60个。测回间须重新初始化,取各测回中数作为观测结果。比较各次观测值剔除粗差。
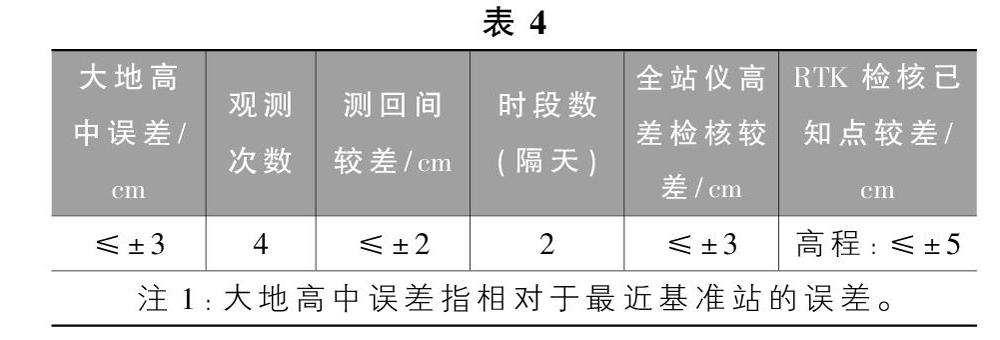
(5)RTK检测已有高程控制点个数不少于2个(检核已知点主要为防止仪器设置错误);用RTK布控时,相邻点间需用全站仪进行高差检核以检查是否存在粗差,以保证成果的可靠性[4]。检核图根以上已知点较差、全站仪检核高差应符合表4规定。
2.4 外界环境影响的控制
减少流动站周边干扰源对观测质量的影响。
RTK作业时,要考虑是否被周边树木、房屋、山坡等遮挡物干扰卫星载波传播路径;大面积水域、大面积反射源(如大面积白色屋顶建筑群)等影响信号质量;电磁干扰较严重的干扰源,如高压电塔、高压线、工地的塔吊也会影响观测精度。外界环境对RTK高程精度影响的偶然性很难发现,往往要通过多次多余观测、不同时段观测以及内业数据排查才能发现外界干扰源对精度的影响。
2019年11月对厦门市海沧区D级点5个,一级点30个,共35个控制点进行RTK检测。检测结果发现,其中点号为H18A0177、H18A0266两点的高程误差大于10cm。隔天再次对这两个点进行检测,结果为H18A0266高程较差1.5cm,H18A0277高程较差-3.2cm,符合要求。经过认真排查,发现这两点有信号干扰源:H18A0266周边30米处有一栋3层大面积白色反射面铁皮屋顶厂房,H18A0277旁边有2米高的行树遮挡,第一次观测时,两点周边500米范围内均未自动生成VRS虚拟站,虽然初始化正常,固定解正常,但检测结果RTK高程误差值超限。复测时,由于时段不同,在流动站附近500米内成功生成了VRS,因而测得的高程满足测量规范的要求[5]。
3 结束语
通过对上述各个RTK高程影响因素的把控,从根源处进行质量控制,细心观测,厦门市网络RTK高程精度总体上满足厦门市城市测量精度的需求。目前网络RTK测高已大量应用于项目竣工测量、地形图的局部修测,四等及等外水准测量,实现了GPS测高取代传统水准测量,进而完成GPS二维平面定位到同时确定海拔高程的三维定位转变,较好地满足了工程领域快速高效获得三维点位的要求。
参考文献
[1]李天文. GPS原理及应用[M]. 北京:科学出版社,2009.
[2]张海瑞,陈西强. CORS系统的技术特点及应用现状与展望[J]. 硅谷,2010,(1):147-148
[3]欧阳欣,江春发,郭垂注.VRS模式下流动站获取正常高的方法[J].地理空间信息,2014年2月:140-141?
[4]城市测量规范. 中华人民共和国住房和城乡建设部,2011.
[5]卫星定位城市测量技术规范. 中华人民共和国住房和城乡建设部,2010.
