电厂自动化系统中的单元机组协调控制系统建模及其控制优化
2020-06-03孙晓东
孙晓东
(内蒙古大板发电有限责任公司,内蒙古 赤峰 025150)
自动化技术在电厂中的合理利用,不仅有利于电厂经济效益的提升,还能够为电厂的安全管理提供有效保障。在电厂自动化系统的实际应用过程中,单元机组具有非常重要的影响和作用,其本身具有非线性和大惯性等特征。单元机组协调控制系统在构建和具体应用过程中的根本目的是为了保证锅炉和汽轮机在运行过程中的协调性,有利于机组尽可能快速、有效地适应整个电网负荷在变化时的形势。
电厂在实际运行过程中,不仅要满足现代人对电能的个性化需求,还要保证整个供电过程的安全性和稳定性,从而有效提升电厂的经济效益[1]。自动化系统在电厂的整体应用过程中,不仅从根本上提高工作效率,还能够节约电厂在经营发展过程中投入的成本。图1 是单元机组协调控制系统的结构示意图。由此可以看出,电厂自动化系统的构建和在实践中的合理利用,不仅能够从根本上缓解电厂在运行过程中的压力,还能够实现电厂经济效益的有效提升。

图1 单元机组控制系统结构
1 电厂自动化系统中单元机组协调控制系统建模分析
1.1 机理/实验建模方法及相关模型的构建
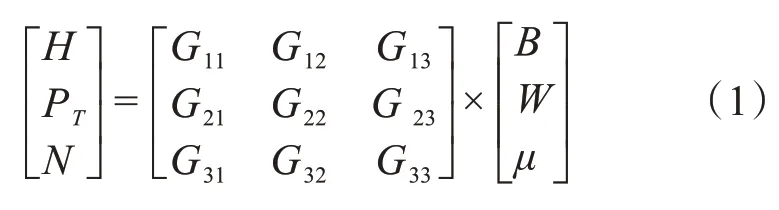
机理建模是一种非常重要的建模方法。这种方法主要是将基本的物理定律作为基础,以系统内部工作的整个过程机理作为出发点。在这一基础上,与实际情况进行结合,构建符合实际要求的数学模型,从而能够有效保证系统的建模效果。机组的中间点焓值H、输出功率N和主汽压力PT为输出量;给水流量W、燃料量B和主汽门调节阀开度μ为输入量。此3输入、3输出数学模型结构如图2所示。
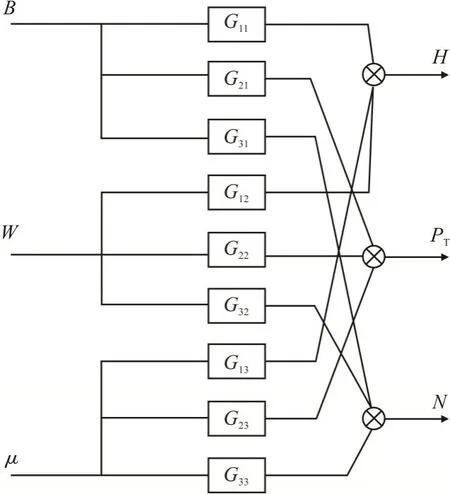
图2 3输入3输出数学模型结构
传递函数模型如下:
通过这种方式构建出的模型,能够最大限度将物理意义充分展示[2]。而这种建模方法在具体应用过程中,对系统自身的工作机理有一定的要求:
1)燃料量与送风量保持一定的比例关系;
2)送风与引风之间保持平衡;
3)保持一定的水煤比。
该实验建模方法主要是以整个单元机组协调控制系统在运行过程中的数据以及在实验过程中的数据作为出发点,进行更加深入的总结和分析,最终计算出控制对象的数学模型。
1.2 智能建模方法以及相关模型
首先,模糊建模方法主要是通过已经输入或者输出的测量数据实现对模型的构建和利用[3-4]。在具体操作过程中,将实际值对比给定值得到偏差,模糊化后得到模糊语言集合e。由模糊规则对e和模糊控制规则R进行模糊决策,得出模糊控制量U。以一个2 输入3 输出的模糊神经网络PID 控制器为例,输入为偏差与偏差变化率,利用模糊规则对PID 参数及进行在线调整。以修正量ΔKp、ΔKi、ΔKd作为输出,以应对PID 参数在偏差和偏差变化率发生实时改变的情况下达到实时参数整定的需求,从而实现对包装计量的实时控制。其中,设定e=[-6-4-2 0 2 4 6],模糊子集为[NB NM NS ZO PS PM PB]。在选择隶属度函数时,由于三角形隶属度函数较为简单且方便运算,因此采用三角形隶属度函数,如图3所示。

图3 隶属度函数
基于PID 参数经验,总结实际计量系统中的实际变化规律,可以得出模糊PID 控制器的3 个参数ΔKp、ΔKi、ΔKd的控制规则,如表1所示。

表1 ΔKp、ΔKi、ΔKd的模糊控制规则表
一般在这种背景下,会建设1 000 MW 的超临界协调控制系统,这样有利于实现对T-S 模型的改进和优化。在这一基础上,会造成与超临界机组参数相互之间的耦合联系,在模型当中适当增加相对应的输入量和输出量,如图4所示。
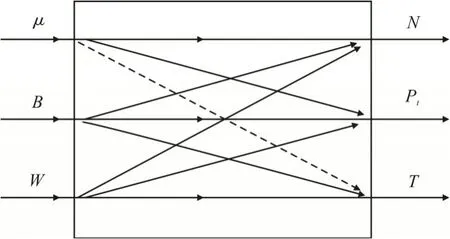
图4 超临界协调控制机组模型
1.3 模糊神经网络PID控制系统
模糊神经网络控制不易受其他因素的影响,可以很好地适应系统的时变性和非线性,且在面对环境变化时有着较强的自主学习能力,而通过模糊神经网络控制器可以把模糊理论表达知识的能力和神经网络的自主学习能力相结合,以此来提高系统整体的控制能力,达到优化控制系统的目的。目前,BP 神经网络的应用十分广泛,且采用误差反向传播学习算法的多层前馈神经网络多数应用在系统的辨识和自适应控制等领域。本试验所采用的BP神经网络控制器的控制系统如图5所示。

图5 控制系统
在BP神经中,第1层为2个输入,即e和ec;第2层为7 个神经元,分别对应输入的7 个模糊子集NB、NM、NS、ZO、PS、PM 和PB;第3 层隐含层的神经元为49个对应模糊PID 控制器的49条规则;第4层隐含层的神经元个数为7,对应输出为相同个数的模糊子集。输出层分别是Kp、Ki、Kd。
在网络结构中,网络输入层的输入为

网络隐含层的输入,输出为
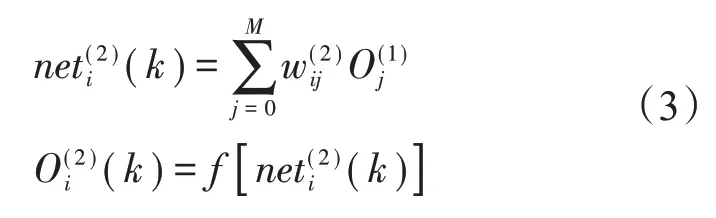
式中,Wij为隐含层加权系数:为网络第1 层输入;(k)为隐含层第 2 层输入;(k)为隐含层第2 层输出;f 为隐含层输出函数;M 为输入节点数。
隐含层神经元的激活函数为

式中,f(x)为激活函数;x为输入值。
网络输出层的输入,输出为
式中,(k)为输出层输入为输出层权系数;(k)为输出层前一层的输出;Q为隐含层节点数(k)为输出层输出;l为 3 个输出;g为输出函数;(K)/(K)/(K)为输出层输出;kp、ki、kd为PID的3个可调参数。
由于Kp、Ki、Kd不能为负值,故输出层取正的sigmoid函数,即

式中,x为输入值。
性能指标函数为

式中,E(k)为输出层性能指标函数;rin(k)-yout(k)为计算时刻误差;rin(k)为给定值;yout(k)为实际输出值。
修正权系数时运用梯度下降法,附加一个惯性项,即

式中,(k+ 1)为附加搜索快速收敛全局极小的惯性项;E(k)为输出层性能指标函数;为输出层的权系数;η为学习速率;a为惯性系数。
经BP 网络对模糊规则表的训练,得出输入到输出之间的非线性关系,从而获得网络各层神经元的连接权值和阈值,并确定输入与输出间的非线性函数,利用这种映射关系可以得出动态称量系统在任意e 和ec改变的情况下的Kp,Ki,Kd的修正值,实现实时在线控制。
2 电厂自动系统中单元机组协调控制系统的控制优化措施
2.1 协调控制系统的应用措施
协调控制系统通过对单元机组运行机理的深入分析和研究,提出一种具有综合性特征的控制措施,在现阶段的电厂自动化系统中得到了广泛应用[5-9],具体的控制策略如图6所示。

图6 协调控制策略
2.2 直接能量平衡在单元机组协调控制系统建模中的应用
直接能量平衡在应用时,根本目的就是无论在任何一种工作状态下,尽可能保证锅炉能量的输入与汽轮机能量需求的平衡。针对单元机组协调控制系统进行构建和具体应用时,直接能量平衡是其中非常重要的一部分[10-11]。
直接能量平衡主要是将汽轮机能量的需求信号作为基础,直接实现对锅炉输入能量的有效控制。与此同时,机组对外界产生的负荷具有良好的反响。汽轮机组的科学利用不仅可以看作是能量需求的基础信号,还可以直接将其作为能量平衡信号,这样不仅能够从根本上对锅炉的输入能量进行有效控制,还能够最大限度保证能量供需相互之间的平衡性。
3 结 语
单元机组协调控制系统是电厂自动化系统在运行过程中非常重要的一部分。所以不仅要保证单元机组协调控制系统建模的准确性和有效性,而且还要提出一系列的控制优化措施,为该系统的应用效果提供保障。在保证工作效率得到有效提升的同时,能够实现电厂经济效益的最大化。
